一种CT扫描床升降控制系统及CT扫描床的制作方法
一种ct扫描床升降控制系统及ct扫描床
技术领域
[0001]
本实用新型涉及ct双推杆扫描床领域,尤其是涉及一种ct扫描床升降控制系统及ct扫描床。
背景技术:
[0002]
在ct设备中,会配置一台扫描床,在扫描过程中,病人会躺在扫描床上,保持相应的姿态进行ct扫描。扫描床需要具备一定范围内的升降功能,主要因为以下两个因素:
[0003]
ct的扫描机架中扫描视野由机架孔径决定,机架孔径中心离机架安装水平面有一定距离,当病人躺在扫描床时,如果病人横切面中心接近机架孔径中心,才能得到最佳的图像质量。因为病人体质状态、扫描姿态都不相同,在病人躺在扫描床后,需要对病床高度进行微调,以达到最佳的扫描状态。
[0004]
另外病人在扫描前上到扫描床和扫描结束后,需要升降扫描床,以方便病人上下床。
[0005]
ct双推杆扫描床的床体的抬升依靠两个推杆在底座滑轨上的滑动,目前的机械结构设置使ct双推杆扫描床在升降过程中在垂直方向的定位精度不够高,升降速度均匀性不够好,存在安全性和可靠性的问题。
技术实现要素:
[0006]
本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种ct扫描床升降控制系统及ct扫描床。
[0007]
本实用新型的目的可以通过以下技术方案来实现:
[0008]
一种ct扫描床升降控制系统,包括控制单元,以及分别与控制单元连接的推杆驱动电机组、测速传感器组和高度传感器,所述推杆驱动电机组包括连接第一推杆的第一推杆驱动电机和连接第二推杆的第二推杆驱动电机,所述测速传感器组包括连接第一推杆驱动电机旋转轴的第一测速传感器和连接第二推杆驱动电机旋转轴的第二测速传感器。
[0009]
还包括急停开关,所述急停开关连接第一推杆驱动电机和第二推杆驱动电机。
[0010]
所述的急停开关为霍尔开关,所述霍尔开关位于底座滑轨上第一推杆或第二推杆运动方向的边界。
[0011]
所述的控制单元包括相互连接的控制器和处理器,所述处理器连接推杆驱动电机组、测速传感器组和高度传感器。
[0012]
所述的控制器设有人机交互界面。
[0013]
所述第一测速传感器和第二测速传感器均为霍尔传感器。
[0014]
所述的高度传感器为拉线编码器,所述拉线编码器连接床体。
[0015]
一种ct扫描床,该ct扫描床包括所述的ct扫描床升降控制系统。
[0016]
与现有技术相比,本实用新型具有以下优点:
[0017]
(1)控制单元连接推杆驱动电机组、测速传感器组和高度传感器,推杆驱动电机组
包括连接第一推杆的第一推杆驱动电机和连接第二推杆的第二推杆驱动电机,测速传感器组包括连接第一推杆驱动电机旋转轴的第一测速传感器和连接第二推杆驱动电机旋转轴的第二测速传感器,该结构可实现综合控制,能够保证第一推杆和第二推杆同步启动、同步移动、速度同步、同步停止,提高了扫描床升降功能的可靠性、精确性和安全性。
[0018]
(2)设计了物理限位,在到达运动边界时,如果触发了限位状态,能够及时停止运行垂直升降,增强了扫描床升降功能的安全性。
附图说明
[0019]
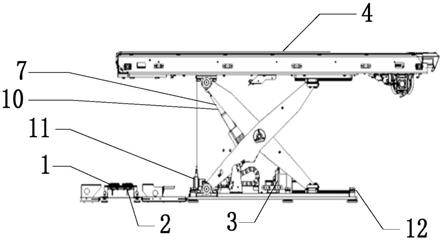
图1为本实用新型的实物结构示意图;
[0020]
图2为本实用新型的模块结构示意图;
[0021]
图3为本实用新型的升降控制方法流程图;
[0022]
附图标记:
[0023]
1为控制器;2为处理器;3为电机驱动单元;4为床体;5为第一电机本体; 6为第一测速传感器;7为第一推杆;8为第二电机本体;9为第二测速传感器;10 为第二推杆;11为高度传感器;12为急停开关。
具体实施方式
[0024]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0025]
实施例
[0026]
本实施例提供一种ct扫描床升降控制系统,包括控制单元,以及分别与控制单元连接的推杆驱动电机组、测速传感器组和高度传感器11,推杆驱动电机组包括连接第一推杆7的第一推杆驱动电机和连接第二推杆10的第二推杆驱动电机,测速传感器组包括连接第一推杆驱动电机旋转轴的第一测速传感器6和连接第二推杆驱动电机旋转轴的第二测速传感器9,高度传感器11获取床体4的实际高度数据。
[0027]
如图1和图2所示,控制单元包括相互连接的控制器1和处理器2,处理器2 连接推杆驱动电机组、测速传感器组和高度传感器11,控制器1设有人机交互界面,第一推杆驱动电机包括第一电机本体5和第一电机本体5的第一电机驱动单元,第二推杆驱动电机包括第二电机本体8和驱动第二电机本体8的第二电机驱动单元,第一电机驱动单元和第一电机驱动单元可为同一个电机驱动单元3,第一测速传感器6和第二测速传感器9均为霍尔传感器,高度传感器11为拉线编码器,急停开关12为霍尔开关,霍尔开关位于底座滑轨上第一推杆7或第二推杆10运动方向的边界,霍尔开关连接第一推杆驱动电机、第二推杆驱动电机和控制器1。
[0028]
具体而言:
[0029]
控制器1主要向处理器2发送控制指令,同时接收处理器2发送的实际高度数据、扫描床运行状态信息,并进行相应的运算和管理,控制器1通过can信号线缆与处理器2进行连接,进行can协议通信。
[0030]
处理器2主要接收控制器1发送过来的控制指令,采用双闭环控制,保证两个推杆
在运动的过程中,保持位移同步、移动速度同步、误差在可控范围以内。同时将实际高度数据、扫描床运行状态信息发送至控制器1。
[0031]
电机驱动单元3主要为第一电机本体5和第二电机本体8提供驱动动力,处理器2将相应驱动电压参数转化为脉冲信号传递给电机驱动单元3,然后电机驱动单元3进行相关电压、电流转换,输出至第一电机本体5和第二电机本体8,从而控制扫描床进行升降。电机驱动单元3通过信号线缆与处理器2进行连接;电机驱动单元3通过动力线缆与第一电机本体5和第二电机本体8进行连接。
[0032]
第一电机本体5主要由永磁同步电机和相应的减速转置、齿轮组成,用于驱动第一推杆7进行伸缩运动。第一电机本体5与第一推杆7通过齿轮进行动力传输。
[0033]
第二电机本体8主要由永磁同步电机和相应的减速转置、齿轮组成,用于驱动第二推杆10进行伸缩运动。第二电机本体8与第二推杆10通过齿轮进行动力传输。
[0034]
所述的第一测速传感器6和第二测速传感器9为霍尔传感器,主要分别用来检测第一推杆7和第二推杆10的实际速度。第一测速传感器6和第二测速传感器9 通过对应法兰,分别连接在第一电机本体5和第二电机本体8的旋转轴上面。第一测速传感器6和第二测速传感器9分别通过信号电缆与处理器2进行连接,将采集到的脉冲信号传递至处理器2,用于计算第一电机本体5和第二电机本体8旋转速度,进而转换成第一推杆7和第二推杆10的实际速度。
[0035]
第一推杆7和第二推杆10主要由滚珠丝杆和相应支持装置组成。
[0036]
拉线编码器主要用来检测床体4的实际高度数据,通过信号电缆与处理器2 进行连接,将实际高度数据通过ssi协议传输至处理器2,用于闭环控制。
[0037]
霍尔开关主要用来进行限位控制,当霍尔开关被触发时,会立即切断第一电机本体5和第二电机本体8的电源,保证第一推杆7和第二推杆10立即停止运动。 ct扫描床升降控制系统中两个推杆受力分析为:
[0038]
f
couch-g=m
couch
*a
couch
[0039]
f
couch
=f1*sinα+f2*sinβ
[0040]
其中,f
couch
为床体4在垂直方向所受的推力,g为床体4和病人负载叠加在一起所受重力。m
couch
为床体4和病人负载叠加在一起的总质量。a
couch
为床体4在垂直方向升降位移加速度。f1、f2分别为第一推杆7和第二推杆10在某一时刻所产生的推力。α、β分别为第一推杆7和第二推杆10在某一时刻所产生的推力与水平面的夹角。
[0041]
如果要保持病床平稳升降运动,即α、β的大小基本相等,误差在允许的范围内(小于0.1
°
),需要控制推杆伸缩位移同步,即同步启动、同步移动、速度同步、同步停止。
[0042]
本实施例提供一种ct扫描床,该ct扫描床包括上述的ct扫描床升降控制系统。
[0043]
上述ct扫描床升降控制系统的使用方法,包括以下步骤:
[0044]
步骤s1:控制单元获取垂直高度设定数据和高度传感器11传递的实际高度数据;
[0045]
步骤s2:控制单元比较垂直高度设定数据和实际高度数据的一致性,若一致,执行步骤s1,若不一致,执行步骤s3;
[0046]
步骤s3:控制单元根据垂直高度设定数据和实际高度数据得到设定速度,并根据测速传感器组传递的转速信息计算第一推杆7和第二推杆10的实际速度;
[0047]
步骤s4:控制单元比较设定速度与实际速度的一致性,若一致,获取高度传感器11
传递的实际高度数据,执行步骤s2,若不一致,根据设定速度计算第一推杆7和第二推杆10的驱动电压参数,并使能第一推杆驱动电机和第二推杆驱动电机。
[0048]
当床体4需要上升或者下降时,控制器1会将垂直高度设定数据发送至处理器 2,处理器2将接收到的垂直高度设定数据作为输入控制信息,将拉线编码器采集的实际高度数据作为反馈值,处理器2依据垂直高度设定数据和实际高度数据,计算垂直位移差,根据垂直位移差得到两个推杆的设定速度;处理器2分别采集第一测速传感器6和第二测速传感器9反馈的第一推杆7和第二推杆10的实际速度,并依据设定速度和实际速度,分别计算第一推杆7和第二推杆10的推杆速度差,并通过电机驱动单元3转换成对应的驱动信号,控制第一推杆7和第二推杆10移动,直到扫描床垂直高度误差达到控制精度要求。
[0049]
ct扫描床升降控制系统中,运行于处理器2的升降控制软件结构如下:
[0050]
1)主任务模块:从控制器1接收的升降控制指令进行逻辑处理,控制第一推杆7和第二推杆10移动至设定垂直高度。将当前扫描床的垂直高度信息和运行状态发送至控制器1。
[0051]
2)ssi通信任务模块:管理拉线编码器发送过来扫描床高度反馈值,同时支持设置拉线编码器的运行参数。
[0052]
3)can通信任务模块:通过can协议接收输入指令和发送状态信息,与控制器1进行can通信。
[0053]
升降控制软件运行包含如图3所示的步骤:
[0054]
101、处理器2装置上电后,其上升降控制软件启动后,对硬件板卡上的各个子模块进行初始化;
[0055]
102、升降控制软件对can模块进行初始化,设置正常的can通信参数和过滤掩码,与控制器1建立can通信;
[0056]
103、升降控制软件对ssi模块进行初始化,设置正常的ssi通信参数,与拉线编码器建立ssi通信;
[0057]
104、升降控制软件的主任务模块运行,对系统消息和运行状态进行逻辑运算处理;
[0058]
105、发送运行状态至控制器1;
[0059]
106、发送实际高度数据至控制器1;
[0060]
107、接收控制器1发送过来的can消息,如果接收到垂直高度设定数据,执行步骤108,否则返回执行步骤104;
[0061]
108、采集拉线传感器反馈的实际高度数据;
[0062]
109、对垂直高度设定数据和实际高度数据进行处理,得到垂直位移差,如果垂直位移差在允许范围内(小于0.2毫米,小于0.2毫米则认为一致),返回执行步骤104;否则继续执行步骤110;
[0063]
110、位置控制模块对垂直位移差进行处理,计算出两个推杆的设定速度;
[0064]
111、采集两个霍尔传感器反馈的实际速度;
[0065]
112、对两个推杆对设定速度和实际速度进行处理,得到推杆速度差,如果推杆速度差在允许范围内(小于0.5毫米/秒,小于0.5毫米/秒则认为一致),返回执行步骤108;否则继续执行步骤113;
[0066]
113、对推杆速度差进行处理,计算出两个推杆的驱动电压参数;
[0067]
114、使能电机驱动单元3的驱动输出信号,用于驱动推杆运动;
[0068]
115、对霍尔开关的状态进行检查,如果霍尔开关触发高电平,执行步骤116;否则返回执行步骤108。
[0069]
116、切断两个推杆的供电电源,禁止电机驱动单元3的输出信号,通知控制器1已经移动至限位位置,返回执行步骤104。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1