外科手术器械设备、致动器和驱动器的制作方法
1.本公开大体上涉及一种用于在患者体腔内执行外科手术的外科手术器械设备。
背景技术:
2.在腹腔镜和/或机器人外科手术中使用的外科手术器械通常具有在近侧定位的致动器,所述致动器可用于致动远侧末端执行器以在患者体腔内执行外科手术任务。此类器械可用于存在操作员很难进入的区域的应用。器械的远侧末端可以插入到很难进入的区域中,并且操作员可以通过致动器远程操纵器械。致动器可位于很难进入的区域之外,但致动器的范围可能仍然存在限制。仍需要适用于腹腔镜和/或机器人器械的致动器和驱动器。
技术实现要素:
3.根据一个公开的方面,提供了一种用于在患者体腔内执行外科手术的外科手术器械设备。所述设备可包含细长操纵器,其具有被配置成接收末端执行器的远侧末端,且包含多个控制连杆,所述多个控制连杆延伸穿过操纵器并被配置成响应于控制连杆在与操纵器的长度大体上对齐的纵向方向上的移动而引起操纵器的远侧末端的移动。所述设备还可包含设置在操纵器的近侧末端处的致动器底盘,所述致动器底盘包含多个致动器,所述致动器滑动地安装在致动器底盘内并被配置成在与纵向方向对齐的方向上线性地移动,每个致动器联接到控制连杆中的一个。致动器围绕致动器底盘的弯曲周边在其邻近处设置,并且包含向外定向部分,所述向外定向部分被配置成将驱动力联接到致动器以引起控制连杆的移动。
4.致动器底盘的弯曲周边可以是圆柱形的,并且多个致动器可以安装在沿着周边纵向延伸并且围绕周边径向布置的槽内。
5.致动器底盘周边可以包含弯曲部分和平坦部分,且多个致动器可以安装在沿着弯曲部分纵向延伸并且围绕弯曲部分径向布置的槽内,平坦部分便于外科手术器械设备邻近(例如,紧邻)包含对应平坦部分的另一设备定位。
6.包含对应平坦部分的另一设备可以包含另一外科手术器械设备,且相应平坦部分可便于相应细长操纵器定位在附近(例如,极为贴近)以通过公共进入口插入,所述公共进入口经插入或定位以提供进入患者体腔的通道。
7.多个致动器的向外定向部分可以各自成形为接合对应驱动联接器,所述驱动联接器被配置成将驱动力联接到致动器。
8.致动器的致动器联接部分可以包含向外延伸超出致动器底盘的弯曲周边的突起。
9.所述设备可以包含驱动底盘,所述驱动底盘包含被配置成将驱动力联接到多个致动器的相应多个驱动联接器,所述驱动联接器围绕致动器底盘的周边布置,每个驱动联接器可以包含:开放式通道部分,所述开放式通道部分被配置成在致动器底盘插入到驱动底盘中时接收相应致动器突起,以及保持部分,所述保持部分被配置成在驱动底盘和致动器底盘旋转经过一定角度使得保持部分接合相应致动器突起时接收并保持相应致动器突起。
10.驱动底盘可以被配置成允许操纵器穿过驱动底盘插入,以使得开放式通道部分接收相应致动器突起。
11.致动器底盘可以包含操纵器与致动器底盘之间的过渡部分,所述过渡部分被配置成使控制连杆横向移位以联接到相应致动器。
12.操纵器可以包含至少一个末端执行器控制连杆,所述至少一个末端执行器控制连杆被配置成联接到末端执行器,且致动器底盘可以包含至少一个末端执行器致动器,所述至少一个末端执行器致动器联接到末端执行器控制连杆以致动末端执行器的移动。
13.至少一个末端执行器致动器可以安装在致动器底盘内以允许以下至少一项:纵向移动,其被配置成致动末端执行器的打开或关闭;或旋转移动,其被配置成引起末端执行器的对应旋转。
14.至少一个末端执行器致动器可以包含单个末端执行器致动器,所述单个末端执行器致动器被配置成执行纵向移动和旋转移动两者。
15.至少一个末端执行器控制连杆可以沿着致动器底盘的中心孔布设,且末端执行器致动器可以安装在致动器底盘的远侧部分。
16.操纵器可以包含连接到致动器底盘的刚性部分,以及被配置成响应于控制连杆的纵向移动而引起操纵器的远侧末端的移动的可致动铰接部分。
17.所述设备可以包含设置在刚性部分与底盘之间的非致动铰接部分,所述非致动铰接部分被配置成在所述设备的清洁和消毒期间允许操纵器弯曲以减小操纵器和致动器底盘的总长度。
18.根据另一个公开的方面,提供了一种用于在患者体腔内执行外科手术的外科手术器械设备。所述设备可包含细长操纵器,其具有被配置成接收末端执行器的远侧末端,且包含多个控制连杆,所述多个控制连杆延伸穿过操纵器并被配置成响应于控制连杆在与操纵器的长度大体上对齐的纵向方向上的移动而引起操纵器的远侧末端的移动。所述设备还可包含致动器底盘,其设置在操纵器的近侧末端处,所述致动器底盘包含安装在致动器底盘内的多个致动器,每个致动器联接到控制连杆中的一个,此联接被配置成将驱动力联接到致动器以引起控制连杆的移动。操纵器的近侧末端可横向偏移以便外科手术器械设备邻近(例如,紧邻)另一外科手术器械设备安置或定位,以用于通过公共进入口插入或定位,所述公共进入口经插入以提供进入患者体腔的通道。
19.操纵器可以包含连接到致动器底盘的刚性部分,以及被配置成响应于控制连杆的纵向移动而引起操纵器的远侧末端的移动的可致动铰接部分。
20.所述设备可以包含设置在刚性部分与致动器底盘之间的非致动铰接部分,所述非致动铰接部分被配置成在所述设备的清洁和消毒期间允许操纵器弯曲以减小操纵器和致动器底盘的总长度。
21.操纵器的近侧末端可横向偏移以便外科手术器械邻近另一外科手术器械设备定位,使得操纵器与另一外科手术器械的另一操纵器之间的间距在约10毫米到约35毫米之间。
22.根据另一个公开的方面,提供了一种用于在患者体腔内执行外科手术的外科手术器械设备。所述设备可包含细长操纵器,其具有被配置成接收末端执行器的远侧末端,且包含多个控制连杆,所述多个控制连杆延伸穿过操纵器并被配置成响应于控制连杆在与操纵
器的长度大体上对齐的纵向方向上的移动而引起操纵器的远侧末端的移动。所述设备还可包含设置在操纵器的近侧末端处的致动器底盘,致动器底盘包含安装在致动器底盘内的多个致动器,多个致动器中的每一个联接到控制连杆中的一个,此联接被配置成将驱动力联接到致动器以引起控制连杆的移动。操纵器可包含连接到致动器底盘的刚性部分,以及被配置成响应于控制连杆的纵向移动而引起操纵器的远侧末端的移动的可致动铰接部分。所述设备可进一步包含设置在刚性部分与底盘之间的非致动铰接部分,所述非致动铰接部分被配置成在所述设备的清洁和消毒期间允许操纵器弯曲以减小操纵器和致动器底盘的总长度。
23.通过结合附图阅读以下对具体公开的实施例的描述,其它方面和特征对于本领域普通技术人员将变得显而易见。
附图说明
24.在绘示所公开的实施例的附图中,
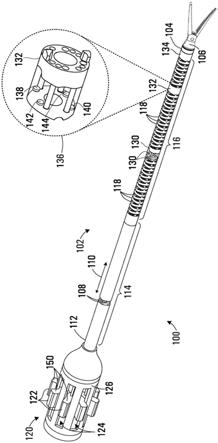
25.图1是用于在患者体腔内执行外科手术的外科手术器械设备的透视图;
26.图2是在图1中展示的外科手术器械设备的致动器底盘的部分剖切透视图;
27.图3a是致动器底盘的示出为与驱动联接器部分接合的致动器的透视图;
28.图3b是示出为与驱动联接器完全接合的致动器的透视图;
29.图4a是包含在图3a和3b中展示的多个驱动联接器的驱动底盘和图2的插入到驱动底盘中的致动器底盘的透视图;
30.图4b是图4a的驱动底盘的透视图,展示了致动器底盘与驱动底盘部分接合;
31.图4c是图4b的驱动底盘的透视图,展示了致动器底盘与驱动底盘完全接合;
32.图5a是根据另一实施例的外科手术器械设备的透视图;
33.图5b是在图5a中展示的经邻近设置以用于通过公共进入口插入的一对外科手术器械设备的透视图;
34.图6是根据另一实施例的经邻近设置以用于通过公共进入口操作插入的一对外科手术器械的透视图;以及
35.图7是根据另一实施例的外科手术器械设备的透视图。
具体实施方式
36.参考图1,用于在患者体腔内执行外科手术的外科手术器械设备大体上在100处展示。设备100包含细长操纵器102,其具有用于接收末端执行器106的远侧末端104。操纵器102包含延伸穿过操纵器的多个控制连杆108。多个控制连杆108可用于响应于控制连杆在与操纵器的长度大体上对齐的纵向方向110上的移动而引起操纵器的远侧末端104的移动。设备100还包含设置在操纵器102的近侧末端112处的致动器底盘120。致动器底盘120包含多个致动器122,所述致动器滑动地安装在致动器底盘内以在与纵向方向110对齐的方向上线性地移动。在所展示的实施例中,致动器122安装在设置在致动器底盘120的弯曲周边126上的相应槽124内与其邻近。
37.在所展示的实施例中,操纵器102包含连接到致动器底盘120的刚性部分114和铰接部分116,铰接部分为可致动的以响应于控制连杆108的纵向移动而引起操纵器的远侧末
端104的移动。铰接部分116包含多个已联接引导件118,所述引导件端对端安装并且可用于响应于多个控制连杆108的拉动或推动而移动,如于2013年12月20日提交的标题为“铰接式工具定位器及采用铰接式工具定位器的系统(articulated tool positioner and system employing same)”的共同拥有的pct专利公开案wo2014/201538中所描述,且所述公开案以全文引用的方式并入本文中。在其它实施例中,操纵器102可以包含用于引起操纵器的远侧末端104的移动的不同于已联接引导件118的结构。
38.参考图2,展示操纵器102的近侧末端112和致动器底盘120,其中致动器底盘被部分地剖切。在一个实施例中,多个控制连杆108被实施为线,这些线穿过延伸穿过操纵器102的相应孔200布设。致动器底盘120具有在操纵器102的近侧末端112与致动器底盘之间的过渡部分202。在此实施例中,过渡部分202包含具有开口206的隔板204,所述开口使得相应控制连杆108朝向致动器底盘120的弯曲周边126横向移位。过渡部分202便于控制连杆108沿着其相应轴线移动,同时防止控制连杆108漂移。在一个实施例中,过渡部分202可以包含在操纵器102的近侧末端112与隔板204之间延伸的弯曲导管(图中未展示),以用于通过过渡部分接收并引导控制连杆108。每个致动器122联接到控制连杆108中的一个。控制连杆108可以使用镍钛诺线来实施,所述镍钛诺线能够弯曲成弧,同时仍然传递拉力或压缩力。镍钛诺是镍和钛的合金,其具有形状记忆和超弹性,且能够传递约200n的力。在其它实施例中,控制连杆108可以使用其它常用的线来实施,例如用于腹腔镜器械的绞合线缆。
39.多个致动器122中的一个致动器208被展示为在槽124内纵向移位。致动器208的纵向移位使得相应地在致动器底盘120内将联接的控制连杆108向后拉动。例如邻近的致动器210和212等其它致动器122可类似地在相应槽124内移动,以推动或拉动相关联的控制连杆108。在所展示的实施例中,致动器底盘120的弯曲周边126是圆柱形的,并且槽124围绕弯曲周边径向布置。
40.返回参考图1,在一个实施例中,成对的控制连杆108联接到联接器段130、132和134。致动器122对控制连杆108的致动使得每个联接器段之间的已联接引导件118横向移位,以使得远侧末端104和末端执行器106移动到期望的位置和定向。联接器段132的一部分被展示为在插入件136中被切除。在此实施例中,多个控制连杆108中的第一对138、140在联接器段132内终止,且当通过推进相关联的致动器122推动控制连杆138,同时通过向后缩回槽内的相关联致动器122拉动控制连杆140时,联接器段132横向移动。类似地,多个控制连杆108中的第二对142、144在联接器段132内终止,且当通过推进槽内的相关联致动器122推动控制连杆142,同时通过向后缩回槽内的相关联致动器122拉动控制连杆144时,联接器段132竖直向上移动。相应致动器122的反向推动和拉动引起相应的横向移动到相反侧或向下移动。
41.在另一实施例中,多个控制连杆108中的第一对138、140可以分别用于在没有对应推动运动的情况下的拉动运动。在此实施例中,当通过向后缩回槽内的相关联致动器122拉动控制连杆140时(同时将控制连杆138释放对应量,例如通过推进相关联的致动器122或允许致动器122自由浮动),联接器段132横向移动。类似地,在另一实施例中,对于多个控制连杆108中的第二对142、144,当通过向后缩回槽内的相关联致动器122拉动控制连杆144时(同时将控制连杆142释放对应量,例如通过推进相关联的致动器122或通过允许致动器122自由浮动),联接器段132竖直向上移动。相应致动器122的反向拉动引起相应的横向移动到
相反侧或向下移动。
42.横向和竖直移动的组合将使得132在操纵器102的工作容积内在任何方向上移动。联接器段134可以类似地通过由相应致动器122致动的其它成对控制连杆108移动,以指向工作容积内的任何方向。进一步如共同拥有的pct专利公开案wo2014/201538中所描述,刚性部分114与联接器段130之间的已联接引导件118以及联接器段130与联接器段132之间的已联接引导件可以被配置成保持联接器段132的定向与刚性部分114基本上相同。在此情况下,铰接部分116的这些部分内的引导件118被在刚性部分114与联接器段132之间延伸的一组线连杆限制为作为二维平行四边形移动。
43.仍然参考图1,致动器122中的每一个包含向外定向部分150,此部分便于将驱动力联接到致动器以引起所联接的控制连杆的移动。在此实施例中,向外定向部分150还相对于弯曲周边126向外突起。参考图3a,致动器122中的一个被展示为与驱动联接器300隔离地接合。驱动联接器300可以是机器人外科手术系统(图中未展示)的器械驱动器的一部分。驱动联接器300包含弯曲外壁302和从弯曲外壁径向向内延伸并在驱动联接器中限定开放式通道306的第一端壁304。开放式通道306的大小设计成当沿图3a中箭头308指示的方向滑动到驱动联接器300中时接收致动器122的突起部分150。一旦接收在开口306内,驱动联接器300就在箭头310的方向上旋转以接合致动器122的向外定向部分150,如图3b中所展示。
44.参考图3b,驱动联接器300进一步包含在弯曲外壁302的全长上延伸的第二端壁312。致动器122的向外定向部分150接合在第一端壁304与第二端壁之间,所述第一端壁和第二端壁限定保持部分,以用于在驱动联接器300旋转经过一定角度使得保持部分接合致动器突起时接收并保持致动器突起150。一旦驱动联接器300被接合,施加到驱动联接器300的力f就被传递到向外定向部分150,引起致动器122在相关联的槽124内的纵向运动。
45.参考图4a,在所展示的实施例中,在图3a和3b中展示的多个驱动联接器300被布置成提供驱动底盘400。驱动联接器300围绕致动器底盘120的周边126环形地布置,其中开放式通道306与致动器122的向外定向部分150对齐。驱动底盘400被配置成在装载外科手术器械设备100时,允许操纵器102穿过驱动底盘插入。驱动联接器300的开放式通道306接收相应致动器突起150,如在图4b中所展示。参考图4b,驱动底盘400和/或致动器底盘120接着沿箭头402指示的方向旋转一定角度,以使得保持部分(即,第一端壁304和第二端壁312,如图3a和3b中所展示)接合相应致动器突起150,如图4c所展示。参考图4c,一旦驱动联接器300被接合,每个驱动联接器就能够在纵向方向110上独立地向后和向前移动,以将驱动力联接到相应致动器122。在一个实施例中,驱动底盘400是器械驱动器(图中未展示)的一部分,用于产生单独的驱动力并将所述驱动力联接到相应驱动联接器300。器械驱动器可以实施为机器人外科手术系统的一部分,其中在输入装置处接收的操作员输入用于产生驱动信号,所述驱动信号用于控制器械驱动器,以通过驱动底盘400和致动器底盘120操纵操纵器102。
46.在图1所展示的实施例中,提供了八个致动器122和相关联的控制连杆108。这些致动器122中的四个引起联接器段132的移动,而剩余的四个致动器引起联接器段134的移动。返回参考图2,操纵器102进一步包含中心孔220,在此实施例中,所述中心孔容纳末端执行器控制连杆222。末端执行器控制连杆222联接到末端执行器106,以用于引起致动器钳口的打开和/或引起致动器围绕操纵器102的纵向轴线的旋转。末端执行器控制连杆222穿过致动器底盘120布设,并联接到致动器底盘的远侧末端处的端盖224。在一个实施例中,端盖
224能够在箭头226的方向上旋转,这使末端执行器控制连杆222旋转,从而引起在操纵器102的远侧末端104处的末端执行器的对应旋转。此外,端盖224还可以被配置成在纵向方向110上移动以致动末端执行器控制连杆222的纵向前后移动,从而打开和关闭末端执行器。因此,单个末端执行器控制连杆222可用于致动末端执行器106的旋转和打开/关闭移动两者。在其它实施例中,末端执行器控制连杆222可以被配置成向末端执行器106提供旋转致动的中空扭矩管,而额外的控制连杆可以穿过中心孔220布设以致动末端执行器106的打开和关闭移动。
47.参考图5a,根据另一实施例的致动器底盘大体上在500处展示。致动器底盘500的周边包含弯曲部分502和平坦部分504。致动器底盘500包含大体上如上文所描述的那样配置的多个致动器506。多个致动器506安装在沿致动器底盘500的弯曲部分502纵向延伸的相应槽508中。致动器506围绕弯曲部分502径向布置,且致动器底盘500联接到操纵器102(部分展示),如上文大体上所描述。
48.在许多情况下,外科手术器械设备100中的两个或更多个可以在通过单个公共进入口(即,到患者体腔的单个切口或开口)执行的外科手术期间使用。参考图5b,致动器底盘500的平坦部分504便于紧密地间隔开邻近于具有对应平坦部分512的第二致动器底盘510的致动器。紧密间隔的优点是将操纵器102和联接到致动器底盘510的操纵器514相对紧密地间隔开,以便通过公共进入口和/或套管针(图中未展示)插入。操纵器之间的间距d可以是小于约10毫米、约10毫米、约20毫米、约21.5毫米、约35毫米、约40毫米,或大于约35毫米或40毫米,例如约50毫米或60毫米。操纵器之间的间距d可以在约10毫米(或更少)与约20毫米(或更多)之间,在约10毫米(或更少)与约35毫米(或更多)之间,在约10毫米(或更少)与约40毫米(或更多)之间,在约20毫米(或更少)与约35毫米(或更多)之间,或在约20毫米(或更少)与约40毫米(或更多)之间。操纵器102和操纵器514离相应致动器底盘500和510中心越远,使得间距d减小,公共进入口/套管针的直径就越小。致动器底盘500和致动器底盘510中的每一个将被接收在驱动底盘(图中未展示)内,所述驱动底盘被配置成容纳并提供用于操作并排外科手术器械的驱动力。
49.参考图6,用于并排外科手术器械操作的替代布置包含间隔开布置的第一致动器底盘600与第二致动器底盘602。每个致动器底盘600、602分别具有联接到所述底盘的操纵器604和606。操纵器604和606具有大体上如上文结合图1实施例所描述的那样配置的相应可致动铰接部分608和610。操纵器604和606各自具有相应的刚性部分612和614。操纵器604的刚性部分612具有向左横向偏移的部分620,而操纵器606具有向右横向偏移的部分622。向左横向偏移的部分620和向右横向偏移的部分622便于操纵器604和606的相应铰接部分608和610紧邻定位,以便通过公共进入口插入。
50.参考图7,根据另一实施例的外科手术器械设备大体上在700处展示。外科手术器械设备700包含大体上如上文所公开的那样配置的致动器底盘702。致动器底盘702联接到操纵器704,所述操纵器包含刚性部分706和可致动铰接部分708,它们同样大体上如所公开的那样配置。在此实施例中,外科手术器械设备700进一步包含设置在刚性部分706与致动器底盘702之间的铰接部分712。铰接部分712允许操纵器弯曲(如图7所展示)以减小器械(即,操纵器和致动器底盘)的总长度。铰接部分712可以在外科手术程序期间被致动,或者可以是在手术期间不被致动的被动部分。
51.在许多情况下,外科手术器械设备700可以是可重复使用的,因此在外科手术中使用之后需要进行清洁和消毒。图1中所展示的外科手术器械设备100的总长度可能会妨碍其容纳在常规的消毒设备内。铰接部分712便于器械弯曲以减小总体尺寸,这可以使器械更容易容纳在去污槽或通常用于外科手术环境中的清洁和消毒的清洗器/消毒器的腔室中。可以通过使可致动铰接部分708可在清洁和消毒期间(即,当不在外科手术中使用时)至少部分地弯曲/挠曲来满足在清洁和消毒期间进行额外弯曲以适应有限空间的限制。此额外弯曲和/或铰接部分712的弯曲可以通过允许延伸穿过操纵器704的控制连杆移动到松弛状态来促进,例如通过操纵致动器(例如,图5a中所展示的致动器506)。
52.本文中所使用的程度语言,例如本文中所使用的术语“大致”、“约”、“大体上”和“基本上”,表示接近所陈述的值、量或特性且仍能发挥所期望的功能或实现所期望的结果的值、量或特性。举例来说,术语“大致”、“约”、“大体上”和“基本上”可以指比所陈述值小不到10%、不到5%、不到1%、不到0.1%或不到0.01%的量。
53.虽然已经描述和绘示了特定实施例,但是这些实施例应当被认为仅是说明性的,而不应当被认为是对根据所附权利要求解释的所公开实施例的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1