具有两部分式驱动杆的钳的制作方法
具有两部分式驱动杆的钳
1.优先权要求
2.本技术要求于2019年3月29日提交的、名称为“blade assembly for forceps(用于钳的刀片组件)”的序列号为62/826,532的美国专利的优先权,该美国专利的全部公开内容通过参引并入。本技术还要求于2019年3月29日提交的、名称为“slider assembly for forceps(用于钳的滑块组件)”的序列号为62/826,522的优先权,该美国专利的全部公开内容通过参引并入。本技术还要求于2019年5月1日提交的、名称为“forceps with camming jaws(具有凸轮作用爪部的钳)”的序列号为62/841,476的美国专利的优先权,该美国专利的全部公开内容通过参引并入。本技术还要求于2020年3月24日提交的、名称为“forceps devices and methods(钳装置和方法)”的序列号为62/994,220的美国专利的优先权,该美国专利的全部公开内容通过参引并入。
技术领域
3.该文献总体上、但非限制性地涉及手术装置比如钳,并且更具体地涉及具有构造成对组织进行抓持、操纵和/或治疗的可致动爪部的钳装置。
背景技术:
4.本公开涉及诸如钳装置的手术装置。钳装置(下文中简称为钳)——包括但不限于电手术钳——通常外科手术比如腹腔镜手术和开放式手术。钳可以用于操纵、接合、抓持解剖学特征或者以其他方式与解剖学特征相互作用,解剖学特征比如为血管或其他组织。
5.钳可以包括端部执行器,该端部执行器是下述各者中的一者或更多者:可旋转的、可打开的、可关闭的、可伸出的、可缩回的、以及能够供应输入比如电手术能量或超声。例如,位于钳的远端端部处的爪部可以经由位于钳的手持件处的元件被致动,以使爪部打开和关闭并由此接合血管或其他组织。钳还可以包括可伸出且可缩回的刀片或其他端部执行器型装置。
技术实现要素:
6.本文中公开了示例性钳,该示例性钳具有由具有凸轮槽或轨道的凸缘中的一个或更多个凸缘促进的可致动爪部和由一对驱动杆支柱形成的驱动杆。驱动杆可以接纳驱动销(凸轮作用或凸轮销)并使驱动销沿着凸轮槽平移,以使钳在关闭位置与打开位置之间转变。本发明的发明人已经认识到可以改进驱动杆以简化钳的设计和制造、降低成本并且使用于其他部件的可用空间最大化。在示例中,驱动杆可以包括一对驱动杆支柱,所述一对驱动杆支柱在一个示例中由两个基本相同的板形成。这两个板可以单独地联接至内轴,例如经由卡接到设置在内轴中的槽中而联接至内轴。能够使用两个基本相同的板并且不必在将驱动杆联接至内轴之前预组装驱动杆可以简化钳的设计和制造、降低成本并且使用于其他部件的可用空间最大化。
7.在示例性中,手术钳可以包括:驱动销;外轴,该外轴限定纵向轴线;第一爪部,第
一爪部以可枢转的方式连接至外管,第一爪部包括位于第一爪部的近端部分处的第一组凸缘,第一组凸缘的每个凸缘包括用于接纳驱动销的第一轨道;第二爪部,第二爪部以可枢转的方式连接至外管,第二爪部包括位于第二爪部的近端部分处的第二组凸缘,第二组凸缘中的每个凸缘包括用于接纳驱动销的第二轨道;内轴,该内轴位于外轴内并且沿着纵向轴线延伸;以及驱动杆,该驱动杆联接至内轴并从内轴向远端延伸。驱动杆包括一对驱动杆支柱,所述一对驱动杆支柱从内轴的远端部分延伸并且定位在第一组凸缘和第二组凸缘的侧向内侧,驱动销能够固定至所述一对驱动杆支柱,其中,驱动杆是能够在外轴内平移以沿着第一组轨道和第二组轨道驱动所述驱动销,从而使第一爪部和第二爪部在打开位置与关闭位置之间移动。
8.在另一示例中,手术钳可以包括:驱动销;外轴,该外轴沿着纵向轴线延伸;第一爪部和第二爪部,第一爪部和第二爪部各自能够相对于外轴枢转,第一爪部包括第一组凸缘,每个第一凸缘包括第一轨道,第一轨道中接纳驱动销,并且第二爪部包括第二组凸缘,每个第二凸缘包括第二轨道,第二轨道中接纳驱动销;以及内轴,该内轴位于外轴内并且沿着纵向轴线延伸;驱动杆,驱动杆联接至内轴并从内轴向远端延伸。驱动杆包括从内轴延伸并单独地联接至内轴的第一驱动杆支柱和从内轴延伸并单独地联接至内轴的第二驱动杆支柱,驱动销连接至第一驱动杆和第二驱动杆,驱动杆能够在外轴内平移以使驱动销沿着第一组轨道和第二组轨道平移,从而使第一爪部和第二爪部在打开位置与关闭位置之间移动。
9.在另一示例中,手术钳包括:驱动销;外轴,该外轴限定纵向轴线;第一爪部,第一爪部以可枢转的方式连接至外管,第一爪部包括位于第一爪部的近端部分处的第一组凸缘,第一组凸缘中的每个凸缘包括用于接纳驱动销的第一轨道。钳可以包括:第二爪部,第二爪部连接至外管;内轴,该内轴位于外轴内并沿着纵向轴线延伸;驱动杆,该驱动杆联接至内轴并从内轴向远端延伸。驱动杆包括:一对驱动杆支柱,所述一对驱动杆支柱从内轴的远端部分延伸,驱动销能够固定至所述一对驱动杆支柱,其中,驱动杆能够在外轴内平移以沿着第一组轨道驱动所述驱动销,从而使第一爪部相对于第二爪部在打开位置与关闭位置之间移动;以及刀片,该刀片位于内轴和驱动杆内,刀片能够平移以在第一爪部与第二爪部之间延伸,其中,驱动杆支柱中的每个驱动杆支柱包括从驱动杆支柱的第一边缘延伸的突出部,从而形成l形板,并且其中,刀片的第一边缘、第二边缘、第一面和第二面不接触所述驱动杆。
10.本文中所描述的特征可以与除钳之外的其他装置比如用于执行治疗、诊断和成像的医疗装置(例如,设备)一起使用。这些装置和方法可以在各种医疗领域——包括但不限于普通手术、妇科、泌尿科、呼吸、心血管或任何其他合适的领域——中使用。
11.该发明内容意在提供本专利申请的主题的概述。它不意在提供对本发明的独占或详尽的解释。包括详细描述以提供关于本专利申请的进一步信息。
附图说明
12.在不一定按比例绘制的附图中,相同的附图标记可以描述不同视图中的类似部件。具有不同字母后缀的相同的附图标记可以表示类似部件的不同实例。附图总体上通过示例而非限制的方式对本文中论述的各种示例进行说明。
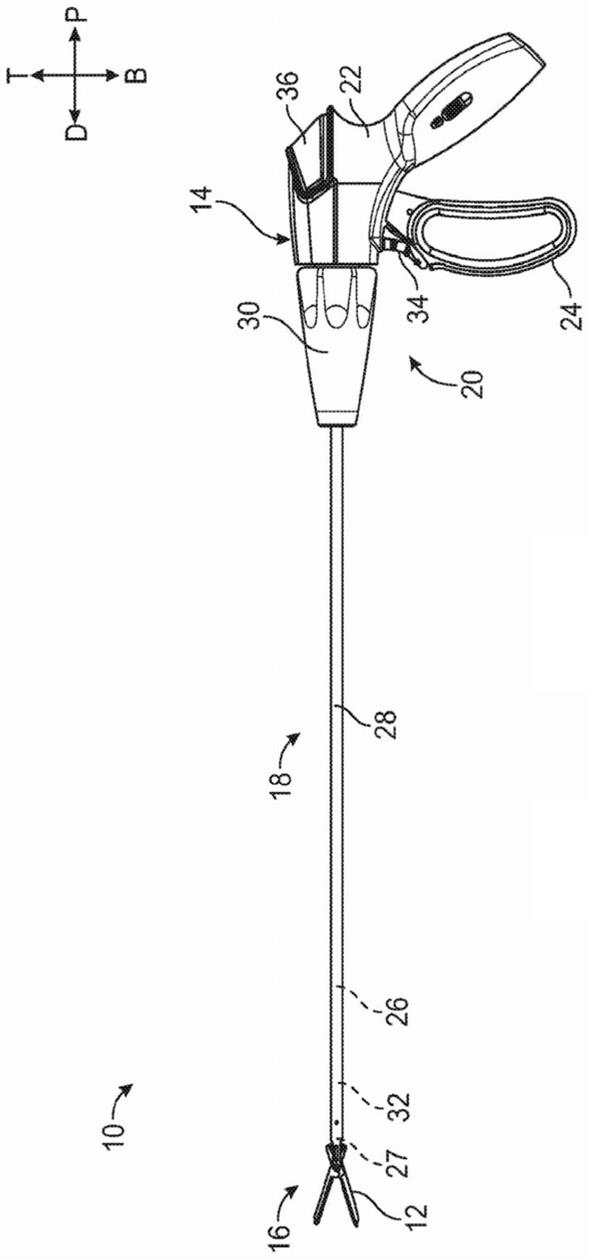
13.图1a是根据本技术的示例的钳的侧视图,该钳具有的爪部处于打开构型。
14.图1b是图1a中的钳的侧视图,该钳具有的爪部处于闭合构型。
15.图2是根据本技术的示例的钳的一部分的侧视图。
16.图3是根据本技术的示例的钳的一部分的立体图。
17.图4是根据本技术的示例的钳的一部分的展开图。
18.图5是根据本技术的示例的钳的远端插塞的前端视图。
19.图6a是根据本技术的示例的驱动杆和内轴的展开图。
20.图6b是图6a中的驱动杆旋转了一百八十(180)度的展开图。
21.图7a是根据本技术的示例的包括刀片的图6a和图6b中所示的驱动杆和内轴的立体图。
22.图7b是图7a中所示的驱动杆和内轴的横截面图。
23.图8是根据本技术的另一示例的驱动杆和内轴的展开图。
24.图9a是包括刀片的图8中所示的驱动杆和内轴的立体图。
25.图9b是根据本技术的示例的驱动杆、内轴和刀片的横截面图。
26.图10是根据本技术的另一示例的驱动杆、内轴和刀片的展开图。
27.图11是图10中所示的驱动杆、内轴和刀片的立体图。
28.图12是根据本技术的示例的驱动杆、内轴和刀片的横截面图。
29.图13是根据本技术的另一示例的驱动杆和内轴的展开图。
30.图14是包括刀片的图13中所示的驱动杆和内轴的立体图。
31.图15是根据本技术的示例的驱动杆、内轴和刀片的横截面图。
具体实施方式
32.包括操作端部执行器的手持件的医疗装置允许外科医生控制装置的端部执行器以致动端部执行器的一个或更多个功能。端部执行器的致动可以通过手持件的一个或更多个致动系统来促进,该致动系统可以收回、伸出或旋转一个或更多个轴以控制端部执行器的动作。
33.本公开总体上涉及医疗装置、比如手术器械。尽管本技术是参照钳进行描述的,但其他端部执行器也可以与本文中描述的手持件一起使用并且通过本文中描述的手持件操作。另外,其他手持件可以连接至本文中描述的端部执行器并且可以控制端部执行器。本公开包括具有一个或更多个致动系统的手持件的示例、端部执行器的示例、以及所公开的致动系统和端部执行器可以在医疗装置中一起使用的示例。
34.钳可以包括医用钳、切割钳、电外科钳或任何其他类型的钳。钳可以包括端部执行器,该端部执行器由包括致动系统的手持件控制成下述中的一者或更多者:可旋转的、可打开的、可关闭的、可伸出的并且能够供应电外科能量或超声。例如,位于钳远端端部的爪部可以经由钳的手持件处的一个或更多个致动器致动,以使爪部打开、闭合以及旋转以接合血管或其他组织。钳还可以包括可伸出和可收回的刀片、比如可以在一对爪部之间向远端伸出以将第一组织与第二组织分开的刀片。
35.在本公开中,诸如说例如“约”、“总体上”或“大致”之类的相对性术语用于指示所阐述数值的
±
10%或数值的
±
10
°
以内的可能的变型。
36.图1a图示了钳10的侧视图,其中,爪部12处于打开位置,并且图1b图示了钳10的侧
视图,其中,爪部12处于闭合位置。诸如近端和远端之类的方向描述词在其在本领域中的普通含义内使用。近端方向p和远端方向d、以及顶部t和底部b在图1a中提供的轴上进行了指示。钳可以包括手持件14、一个或更多个致动器20、外轴28(或外管)、内轴26(或内管)、驱动杆27以及端部执行器16。
37.钳10可以包括在近端端部处的手持件14和在远端端部处的端部执行器16。中间部分18可以在手持件14与端部执行器16之间延伸以将手持件14以可操作地方式联接至端部执行器16。端部执行器16的各种运动可以由手持件14的一个或更多个致动系统20控制。在说明性示例中,端部执行器16可以包括能够在打开位置与闭合位置之间移动的爪部12。端部执行器16可以沿着钳10的纵向轴线a1旋转。端部执行器16可以包括切割刀片和用于施加电外科能量的电极。
38.钳10可以包括爪部12、壳体22、杠杆24、内轴26、驱动杆27、外轴28、旋转的致动器30、刀片组件32、触发器34以及/或者致动按钮36。在该示例中,端部执行器16或端部执行器16的一部分可以是下述中的一者或更多者:打开的、关闭的、旋转的、伸出的、收回的和电外科通电的。
39.为了操作端部执行器16,用户可以向近端移位杠杆24以将爪部12从打开位置(图1a)驱动至闭合位置(图1b)。在钳10的示例中,将爪部12从打开位置移动至闭合位置允许用户夹持并压缩组织。手持件14还可以允许用户旋转端部执行器16。例如,旋转旋转的致动器30通过使内轴26、驱动杆27和外轴28一起旋转而使端部执行器16旋转。
40.在一些示例中,在组织被压缩的情况下,用户可以按下启用按钮36以使电外科能量被输送至端部执行器16、比如电极。电外科能量的应用可以用于处理组织,比如密封组织或以其他方式影响被夹持的组织。在一些示例中,电外科能量可以导致组织被密封、烧蚀和/或凝固。本文中描述了示例的电极,但电外科能量可以施加至任何合适的电极。
41.在一些示例中,钳10可以用于经由刀片组件32(也称为刀片32)切割被处理的组织。例如,手持件14可以使用户能够伸出和收回刀片32。刀片32可以通过向近端移位触发器34而伸出。刀片32可以通过允许触发器34向远端返回至默认位置而收回。触发器34的默认位置在图1中示出。在一些示例中,手持件14可以包括抑制刀片32伸出直到爪部12至少部分闭合或完全闭合的特征。
42.钳10可以用于对患者进行治疗、比如外科手术。在示例中,包括爪部12的钳10的远端部分可以插入到患者的身体中,比如通过患者身体的切口或另一解剖特征插入到患者的身体中。而钳10的包括壳体22的近端部分保持在身体的切口或另一解剖特征的外部。杠杆24的致动导致爪部12夹持在组织上。旋转的致动器30可以经由用户输入而旋转以旋转爪部12,以用于在手术期间的任何时间中操纵爪部12。启用按钮36可以被致动以向爪部12提供电能以烧灼、干燥或密封闭合爪部12内的组织。可以移动触发器34以向远端平移刀片32,以便切割爪部12内的组织。
43.图2图示了处于打开位置的钳10的一部分的侧视图。端部执行器16可以构造为关节式爪部12a(顶部爪部12a)和关节式爪部12b(底部爪部12b)(统称为爪部12),关节式爪部12a和关节式爪部12b构造成操纵、接合、紧抓解剖特征或以其他方式与解剖特征相互作用,该解剖特征比如血管或其他组织。在一个示例中,爪部12是双作用爪部,其中,顶部爪部12a和底部爪部12b两者都可以相对于外管28移动(旋转)。在一个示例中,顶部爪部12和底部爪
部12b中的仅一者相对于外管28旋转。也就是说,在一个示例中,顶部爪部12可以构造成相对于底部爪部12b和外管28旋转。在另一示例中,底部爪部12可以构造成相对于顶部爪部12a和外管28旋转。
44.钳10可以包括顶部爪部12a、底部爪部12b、引导件46(或近端销)、驱动销44(或凸轮销44)以及枢转销40。端部执行器16的爪部12可以经由枢转销40连接至外轴28。枢转销40可以延伸穿过爪部12的一部分,使得枢转销40可以被外轴28的外臂50(只有一个外臂50在图2中可见)接纳。
45.钳10可以具有联接至内轴26的往复驱动杆27,内轴26至少部分地定位在外轴28内。如本文中所论述的,驱动杆27可以联接至内轴16并且从内轴16向远端延伸。驱动杆27可以具有附接至驱动杆(例如,驱动杆的远端端部处)的驱动销44(或凸轮销44)。因此,驱动杆27和驱动销44由此可以是能够相对于外轴28以可平移的方式移动的。驱动杆27(通过外轴28的臂50中的槽42可见)的运动可以使驱动销44沿着外轴28的纵向轴线a1和爪部12的纵向轴线横穿并且可以由于如下文进一步论述的凸轮作用而移动爪部12。
46.引导件46可以比如通过插入到孔口47a和孔口47b(统称为孔口47;图2中仅一个孔口47可见)中而固定至外轴28。在一些示例中,孔口47可以大致同轴并且可以大致与纵向轴线a1垂直。在这种情况下,引导件46可以定位在孔口47中并且可以位于由孔口47限定的且与轴线a1大致垂直的轴线上。孔口47还可以大致围绕外轴28居中以使引导件47居中。在一些示例中,孔口47可以偏离轴线a1(或者上方或者下方)并且与轴线a1大致垂直。在其他示例中,孔口47可以穿过由轴线a1部分限定的横向平面,使得一个孔口位于轴线a1上方,并且一个孔口位于轴线a1下方;在这种构型中,由孔口47限定的轴线可以穿过轴线a1或者可以偏离轴线a1。驱动杆27的轴向轨道70和内轴26的轴向轨道72(参见图3)可以构造成匹配引导件46的定向以允许驱动杆27和内轴26相对于引导件46平移。
47.外轴28可以包括一对外臂50。钳10还可以包括远端插塞48,远端插塞48可以是能够定位在外臂50之间位于外轴28内的插塞,使得驱动杆27和刀片32可以平移穿过远端插塞48。如本文中所论述的,远端插塞48可以包括延伸穿过远端插塞中的通道以允许驱动杆27和刀片32延伸穿过远端插塞48(并且相对于远端插塞48平移)。下面更详细地论述了远端插塞48。
48.如图2中所示,爪部12a和爪部12b中的每一者可以分别具有一对间隔开的凸缘52、54(在图2中仅两个凸缘可见、即爪部12a和爪部12b中的每一者的一个凸缘可见)。随后将更详细地描述凸缘52、54的布置和构造。根据一些示例,爪部12的一对凸缘52、54可以沿着纵向方向大致彼此平行地布置(例如,具有大致平行的间隔开的内表面的接口)但由内驱动杆27间隔开。一对凸缘52、54中的至少一个凸缘可以经由枢转销40以可枢转地方式联接至外轴28。
49.凸缘52、54中的每个凸缘还可以分别具有与枢转销40间隔开的轨道56、58(本文中有时称为凸轮槽或槽)。轨道56、58可以构造成接纳驱动销44,驱动销44能够以可移动地方式固定在轨道56、58中。驱动销44可以具有比轨道56、58的宽度小的直径,以便被轨道56、58以可移动地方式接纳。当驱动杆27移动时,例如通过向内轴26施加线性运动而移动时,驱动销44可以沿着轨道56、58的纵向长度进行横穿。驱动销44、驱动杆27和内轴26(联接至一个或更多个致动器20的一部分)可以构造成用于相对于外轴28往复运动,使得驱动销44能够
以往复的方式横穿轨道56、58。每个轨道56、58可以构造成用作凸轮,使得当驱动销44横穿轨道56、58的纵向长度时,爪部从第一打开位置(在图1a中所示)被朝向第二闭合(紧抓)位置(图1b)驱动并且被驱动至第二闭合位置,或者爪部从第二闭合(紧抓)位置(图1b)被朝向第一打开位置(在图1a中所示)驱动并且被驱动至第一打开位置。凸缘52、54的形状和尺寸且包括轨道56、58的形状、尺寸和布置可以构造成对爪部12的其他部分能够与被处理的血管或其他组织接触的程度进行限制或控制。
50.一对凸缘52、54中的每一者的轨道56、58可以彼此对准并且可以具有大致相同的形状。换句话说,如图1a、图1b和图2中所示,当从侧部观察端部执行器16时,一对凸缘52、54中的每一者的轨道56、58可以对准。因此,爪部12中的每个爪部的轨道56、58可以在与爪部12的纵向轴线a1的方向垂直的方向上对准。枢转销40可以固定至外轴28。凸缘52、54上的枢转孔口可以固定至枢转销40。驱动销44可以装配到一对凸缘52、54中的每一者上的轨道56、58中。特别如图2中所示,销40、44和销46可以彼此平行并且沿着纵向轴线a1布置,轨道54可以具有相同的尺寸并且可以如上所述且图示的那样对准。
51.图3图示了钳10的一部分的立体图。顶部爪部12a可以包括凸缘52a、52b(统称为凸缘52)和上夹板60,并且底部爪部12b可以包括凸缘54a、52b(统称为凸缘52)和下夹板62。凸缘52a和凸缘52b可以分别包括轨道56a和轨道56b(统称为轨道56;图4中示出了轨道56b)。凸缘54a和凸缘54b可以分别包括轨道58a和轨道58b(统称为轨道58)。
52.爪部12可以是构造成接合组织的刚性构件。爪部12可以经由枢转销40(参见图2)联接至外轴28,比如以可枢转的方式联接至外轴28。枢转销40可以延伸穿过爪部12的一部分,比如延伸穿过爪部12中的每个爪部的枢转孔口,使得枢转销40可以被外轴28的外臂50(参见图1)接纳。例如,凸缘52a和凸缘52b可以分别具有枢转孔口64a和枢转孔口64b,并且凸缘54a和凸缘54b可以具有枢转孔口66a和枢转孔口66b(参见图4)。
53.如图3中看到的,凸缘52可以与凸缘54交错。在其他示例中,凸缘54可以定位在凸缘52的侧向外部,或者替代性地,凸缘52可以定位在凸缘54的侧向外部。
54.爪部12的夹板60、62可以各自是刚性或半刚性构件,该刚性或半刚性构件构造成比如在电外科手术期间接合组织和/或相对的爪部以紧抓组织。夹板60、62中的一个或更多个夹板可以包括构造成增加夹板60、62与组织之间的接合压力和摩擦的锯齿、突出部、脊状部等中的一者或更多者。上爪部12a的凸缘52可以远离夹板60向近端延伸。类似地,下爪部12b的凸缘54可以远离夹板62向近端延伸。爪部12可以各自包括构造成将电力输送至组织的电极(可选地通过夹板60、62)、支承电极的框架、以及构造成在爪部12之间接纳刀片的刀片槽66、68,如本文中所论述的。
55.爪部12a的轨道56和凸缘12b的轨道58可以各自分别是凸缘52和凸缘54中的槽、通道、路径或轨道。在一些示例中,当枢转销40联接至爪部12(并且可选地联接至外轴28)时,轨道56和轨道58可以位于枢转销40的近端。轨道56和轨道58可以成形成在轨道中接纳驱动销44。在一些示例中,轨道56和轨道58可以是槽或通道,该槽或通道构造成通过槽或通道接纳驱动销44以将驱动杆27连接至凸缘52和凸缘54(并且因此连接至爪部12)。
56.轨道56和轨道58在一些示例中可以是直的并且在一些示例中可以是弓形的形状。在任何示例中,轨道56和轨道58可以构造成允许驱动销44同时沿着轨道56和轨道58行进以打开和关闭爪部12。
57.理解的是,可以对本文中描述的手术钳进行各种修改。例如,根据一些示例,爪部可能不是双作用的而可能是单作用的。在一些示例中,可以使用单个凸缘而不是一对凸缘。尽管爪部被描述为具有凸缘(或多个凸缘),但在一些情况下,爪部可能不利用凸缘,使得诸如轨道之类的特征可以直接穿过例如爪部本身的本体部分。
58.如图3中看到的,驱动杆27从内轴26向远端延伸。驱动杆27和内轴26均分别包括用于接纳引导件46的轴向轨道70、72(参见图2)。例如,驱动杆27可以包括一对轴向轨道70a和轴向轨道70b(参见图4,统称为轴向轨道70)并且内轴26包括一对轴向轨道72a和轴向轨道72b(统称为轴向轨道72)。轴向轨道70、72也可以称为轴向槽或通道。另外,本文中进一步所论述的,驱动杆27的轴向轨道70可以称为驱动杆27的近端槽,并且内轴26的轴向轨道72可以称为内轴26的远端槽。轴向轨道70可以各自是横向延伸穿过驱动杆27的壁的轴向槽,使得引导件50延伸穿过驱动杆27。轴向轨道72可以是构造成接纳引导件46的通道、凹槽、凹部或其他引导件。
59.驱动杆27可以联接至内轴26。在示例中,驱动杆27可以包括一对驱动杆支柱80a和驱动杆支柱80b(统称为驱动杆支柱80)。如在下文中进一步论述的,驱动杆支柱80和内轴26可以包括对应的特征部比如突出部、突部、凹槽、凹部等,以将驱动杆支柱80联接至内轴26。一旦进行联接,则驱动器杆支柱80轴向地且旋转地联接至内轴26。在示例中,内轴26可以包括一个或更多个槽(例如,槽84)和一个或更多个柔性凸部74以使驱动杆支柱80能够插入到内轴26中。例如,当驱动杆支柱80插入到开口82中并且沿着内轴26的槽84时,柔性凸部74可以弯曲以允许驱动杆支柱80的一部分通过并且返回至原始位置同时定位在驱动杆支柱中的对应凹部78内。
60.如本文中所论述的,驱动杆27可以在驱动杆支柱80的远端端部处例如在驱动销开口76内接纳驱动销44。因此,驱动杆27和驱动销44由此可以是能够相对于外轴28和第一爪部12a和/或第二爪部12b以可平移的方式移动的。
61.图4图示了钳10的一部分的展开图。远端插塞48可以是能够定位在外轴28内的插塞(参见图2)。远端插塞48可以包括延伸穿过远端插塞的刀片通道92,以允许刀片32延伸穿过远端插塞48(并且相对于远端插塞平移)。在示例中,刀片通道96沿着纵向轴线a1居中定位。
62.刀片32可以是包括一个或更多个锋利边缘100的长形切割构件,锋利边缘100构造成切割或切除组织或其他物品。刀片32可以联接至刀片轴96。刀片32可以位于外轴28内(并且位于内轴26和驱动杆27内)并且可以沿着轴线a1延伸。刀片32可以是能够相对于内轴26、驱动杆27和外轴28平移的,以在顶部爪部12a与底部爪部12b之间延伸(或延伸到顶部爪部12a和底部爪部12b中)。如本文中所论述的,刀片32可以轴向延伸穿过驱动杆27并穿过凸缘52、54,使得刀片32处于第一组凸缘52、第二组凸缘54以及一对驱动杆支柱80的侧向向内的位置中。
63.钳10可以包括引导管90,引导管90可以定位在内轴26和外轴28内并且可以延伸穿过外轴28和内轴26。引导管90可以包括限定刀片孔口92和布线孔口94的本体91。本体91可以沿着轴线a1延伸并且在一些示例中可以是大致圆柱形的,但是在其他示例中可以具有其他形状比如椭圆棱柱、直角棱柱、六棱柱、八角棱柱等。本体91可以构造成、比如定尺寸和定形状成与内轴26的内部孔口互补。刀片孔口92和布线孔口94可以各自是沿着轴线a1轴向延
伸穿过本体91的孔口。刀片孔口92可以定尺寸和定形状成接纳穿过刀片孔口的刀片32的轴96并且可以构造成允许轴96在引导管90内平移以允许根据手柄操作刀片32使得刀片32可以在爪部12的刀片通道内平移。
64.在一些示例的操作中,当爪部位于打开位置与关闭位置之间或者当爪部12处于关闭位置中时,刀片32可以在驱动杆27之间向远端平移到爪部12的轨道中。刀片32可以用于切割爪部12之间的组织或其他物品
65.图4图示了包括刀片轨道102(或刀片通道102)的刀片32。刀片轨道102可以构造成与引导件46接触以限制刀片32相对于引导件46和外轴28的轴向平移。例如,近端边缘(近端边缘可以被倒圆成与引导件46互补)可以构造成与引导件46接触以限制刀片32相对于内轴26、驱动杆27、外轴28和爪部12向远端平移。另外,引导件46、驱动销44和枢转销40中的一者或更多者与刀片轨道102的顶部边缘之间的接触可以帮助限制刀片32相对于内轴26、驱动杆27、外轴28以及爪部12的向下和/或向上运动。这种接触还可以帮助限制刀片32的旋转,比如限制刀片围绕轴线a1旋转。
66.图5图示了引导管90的正视图。在示例中,刀片孔口92和布线孔口94沿着纵向轴线a1和引导管90的中线m1定位。在一个示例中,布线孔口94可以偏离引导管90的中线m1。
67.图6a至图15图示了具有联接至内轴的驱动杆支柱的驱动杆的不同示例。图6a至图7b图示了前面的附图中示出的示例。驱动杆27可以联接至内轴26。在示例中,驱动杆27可以由从内轴26的远端部分延伸的一对驱动杆支柱80a、80b(统称为驱动杆支柱80)形成。在示例中,驱动杆支柱80是大致相同的板。例如,驱动杆支柱80可以具有相同的形状、长度和特征。即,诸如突出部、凹槽、凹部、轴向轨道以及孔口之类的特征在两个板之间大致处于相同的位置并且具有相同的尺寸。通过具有用于驱动杆27的驱动杆支柱80的两个相同的板,可以简化驱动杆支柱27的制造,可以降低总体生产成本,并且可以更容易地进行钳的组装。在另一示例中,驱动杆支柱80a和驱动杆支柱80b可以彼此不同。
68.驱动杆支柱80a和驱动杆支柱80b可以从近端端部110延伸至远端端部112。如本文中所论述的,驱动杆支柱80可以包括轴向轨道71和孔口76。在示例中,孔口76位于轴向轨道71远端。驱动杆支柱80可以包括第一边缘114、与第一边缘114相反的第二边缘116、以及在第一边缘114与第二边缘116之间延伸的面向刀片的表面136。如本文中所论述的,面向刀片的表面136可以是彼此相邻定位的驱动杆支柱80的面部,使得面向刀片的表面形成构造成接纳刀片的通道(例如,刀片通道)。第一边缘114和第二边缘116可以构造成具有对应于内轴26上的特征的形状(轮廓),使得驱动杆支柱80可以联接至内轴26。在示例中,驱动杆支柱80可以具有沿着第一边缘114朝向近端端部110的凹部78,并且具有沿着第二边缘116朝向近端端部110的凹部132。第一边缘114包括近端部分191(凹部78近侧)和远端部分192(凹部78远侧)。类似地,第二边缘116包括近端部分193(凹部132近侧)和远端部分194(凹部132远侧)。
69.如图7b中看到的,内轴26的外径d1大致等于驱动杆支柱80的高度h。在示例中,驱动杆支柱80的高度h可以小于内轴26的外径d但大于内径。在示例中,驱动杆支柱80的高度h可以大于内轴26的外径d且小于外轴28的内径,使得驱动杆27仍可以在外轴28内平移。内轴26可以包括柔性凸部74,该柔性凸部构造成弯曲以允许驱动杆支柱80被插入到内轴26的远端开口中。由于驱动杆支柱80的高度h大于内轴26的内径,因此驱动杆支柱80的插入导致柔
性凸部74向外弯曲(例如,远离纵向轴线)。一旦柔性凸部74与凹部78对准,则柔性凸部74移动到凹部78中以将驱动杆支柱80联接至内轴26。
70.在示例中,内轴26的顶部表面124可以限定槽79a、79b、81和槽84。槽79a、79b和槽81可以彼此连通并且限定柔性凸部74。柔性凸部74可以包括脊部195,如本文中所论述的,脊部195可以被接纳在驱动杆支柱80的两个凹部78中。
71.槽84可以从内轴26的远端端部向近端延伸。槽84的宽度使得槽84可以接纳两个驱动杆支柱80并且仍然存在足以将刀片32接纳在其中的间隙142。例如,间隙142使得刀片32可以在驱动杆支柱80之间自由地平移而不受驱动杆支柱80的干扰。在一个示例中,面向刀片的表面136可以接触刀片32。在其他示例中,面向刀片的表面136不接触刀片36。此外,如图7b中看到的,驱动杆支柱80的任何部分都不覆盖刀片32的顶部边缘123或底部边缘125。即,当组装时,在刀片32的上方和下方存在竖向间隙190。在一个示例中,竖向间隙190表示驱动杆的任何部分都没有定位在刀片32的顶侧和底侧的上方或下方。在另一示例中,竖向间隙表示在刀片32的顶侧和底侧与驱动杆的一部分之间具有足够的空间。例如,竖向间隙可以表示刀片的顶侧和底侧与驱动杆之间有足够的空间,使得刀片的顶侧和底侧不会接触驱动杆。因此,在示例中,刀片32的顶部、底部以及侧表面不会接触驱动杆支柱80。另外,在图7b中所示的示例中,驱动杆支柱80的任何部分都没有在刀片32的顶侧或底侧上方延伸。
72.内轴26的顶部表面124还可以包括位于柔性凸部74上的平行的槽122a和槽122b(统称为槽122)。凹部78的长度至少和槽84的近端端部与槽122的远端端部之间的距离一样长。因此,一旦组装,则驱动杆支柱80的近端部分191可以位于槽122内(例如,驱动杆支柱80a的近端部分191位于槽122a中并且驱动杆支柱80b的近端部分191位于槽122b中)并且驱动杆支柱80a和驱动杆支柱80b的远端部分192位于槽84内。在所示的示例中,驱动杆支柱80a和驱动杆支柱80b彼此不接触。
73.图6b图示了图6a中的但旋转了180度的内轴26和驱动杆支柱80。内轴26可以包括能够与槽84相对(径向相对)的槽85。在一个示例中,槽85的长度与槽84的长度不同。在另一示例中,槽84的长度和槽85的长度是相同的。如本文中关于槽84、槽85所论述的,槽84、槽85构造成接纳驱动杆支柱80a和驱动杆支柱80b两者。位于槽85附近的是一对平行的槽131a和槽131b(统称为槽131)。槽131可以与槽122相对。因此,一旦组装,驱动杆支柱80的近端部分193可以位于槽131内(例如,驱动杆支柱80a的近端部分193位于槽131a中,并且驱动杆支柱80b的近端部分193位于槽131b中)并且驱动杆支柱80a和驱动杆支柱80b的远端部分194位于槽85内。在所示的示例中,驱动杆支柱80a和驱动杆支柱80b彼此不接触。
74.如图6a至图7b中看到的,可以使用两个相同的板。因此,可以简化驱动杆支柱80的制造。驱动杆支柱80可以彼此面对放置。在示例中,驱动杆支柱80可以具有大体平行间隔开的内表面(或面向刀片的表面136)的接口。驱动杆支柱80可以插入到内轴26的远端端部中并且简单地卡入内轴26中。例如,当驱动杆支柱80可以插入到内轴26中时(一次插入一个驱动杆支柱或一起插入),第一边缘114的近端部分191导致柔性凸部74(远离纵向轴线a1)向外弯曲并且允许驱动杆支柱80在内轴26内卡到位。
75.本文中论述的在内轴26和驱动杆支柱80上的特征使得驱动杆支柱80联接至内轴26。然而,在示例中,一旦驱动杆支柱插入到内轴26中,则驱动杆支柱80还可以通过例如点焊、软钎焊、硬钎焊或其他类似工艺联接至内轴。另外,在示例中,驱动销44可以固定至驱动
杆支柱80,例如通过点焊、软钎焊、硬钎焊或其他类似工艺固定至驱动杆支柱80。
76.图8至图9b图示了联接至驱动杆27’的内轴26的另一示例。所示的示例可以与本文中描述的钳10所有部件一起使用。内轴26与本文中公开的内轴26相同。然而,先前所示的驱动杆支柱80a和驱动杆支柱80b已经被修改成驱动杆支柱80a’和驱动杆支柱80b’(本文中统称为驱动杆支柱80’)。除了驱动杆支柱80’与驱动杆支柱80包括不同的轴向轨道(例如,轴向轨道200),驱动杆支柱80’与驱动杆支柱80相同。如图8中看到的,轴向轨道200由第一侧部204、近端侧部207、第二侧部206(与第一侧部204相对)以及远端侧部208限定。驱动杆支柱80a’包括从面向刀片的表面136延伸的突出部202,面向刀片的表面136形成构造成接纳刀片32的刀片通道。在图8至图9b中所示的示例中,因为驱动杆支柱80’包括附加特征(例如,突出部202),为了使用用于驱动杆支柱80的两个相同的板,驱动杆支柱80b’是旋转了一百八十(180)度的驱动杆支柱80a’。因此,驱动杆支柱80b’包括从面向刀片的表面136延伸的突出部。驱动杆27’可以与驱动杆支柱27联接至内轴26的方式类似地联接至内轴26。然而,在将驱动杆27’联接至内轴26之前,驱动杆支柱80’围绕刀片32定位成使得突出部202延伸穿过刀片轨道102并且与刀片23形成h形梁。
77.如所论述的,驱动杆支柱80b与驱动杆支柱80a相同,但旋转了一百八十(180)度。因此,一旦组装,则驱动杆支柱80a的近端部分191可以位于槽122a内并且驱动杆支柱80a’的近端部分193可以位于槽122b内并且驱动杆支柱80a’的远端部分192和驱动杆支柱80b’的远端部分194位于槽84内。在所示的示例中,驱动杆支柱80a’和驱动杆支柱80b’彼此不接触或与刀片32不接触,即使驱动杆支柱80a’和驱动杆支柱80b’在刀片32周围形成h形梁并且突出部202在刀片轨道102内延伸。
78.如图9b中看到的,突出部202延伸穿过刀片轨道102并且进入到另一驱动杆支柱80’的轴向轨道200中。虽然突出部202延伸穿过刀片轨道102,但刀片的顶部表面和底部表面没有被驱动杆支柱80’的任何部分覆盖。在示例中,突出部202不延伸超过另一驱动杆支柱80’的对应轴向轨道200的外表面210,以使用于内管26内的其他部件的可用空间最大化。另外,防止突出部202延伸超过另一驱动杆支柱的外表面210可以确保驱动杆27’可以平移地延伸穿过远端插塞48(参见图4)。
79.图10至图12图示了联接至内轴222的驱动杆220的另一示例,该内轴222可以用于钳10中,如本文中所公开的。驱动杆220包括一对驱动杆支柱224a和驱动杆支柱224b(统称为驱动杆支柱224)。在示例中,驱动杆支柱224a和驱动杆支柱224b是相同的板。如上所述,驱动杆支柱224包括可以接纳引导件46的轴向轨道226和可以接纳驱动销44的钻孔228。
80.驱动杆支柱224包括第一表面231、第二表面232(与第一表面231相反)、第一边缘260和第二边缘262。第一表面231和第二表面232在第一边缘260与第二边缘262之间延伸。在示例中,驱动杆支柱224具有从第一边缘260延伸远离第二表面232的翻折突出部230。也就是说,翻折突出部230基本上垂直于第二表面232延伸。简单地说,驱动杆支柱224是l形板。翻折突出部230形成l形板的短端部,并且从第二边缘262延伸至翻折突出部230的表面形成l形板的长端部。第二边缘262包括从纵向轴线a1轴向延伸的突出部234。如图10中看出的,驱动杆支柱224a和驱动杆支柱224b是相同的板。因此,驱动杆支柱224a和驱动杆支柱224b定位在内轴26内,并且驱动杆支柱224b是驱动杆支柱224a旋转了一百八十(180)度。
81.内轴222包括顶表面270和底表面272,并且每个表面270、272包括用以接纳驱动杆
支柱224的一部分的槽。在示例中,内轴222包括槽240a和243a(沿着顶表面270)和槽240b和243b(沿着底表面272)。槽240a和240b(在本文中统称为槽240)包括第一槽部分242a和242b(统称为第一槽242)和第二槽部分244a和244b(统称为第二槽部分244)。第一槽部分242具有等于或略大于突出部230的宽度w1的宽度。第二槽部分244比第一槽部分242薄。例如,第一槽部分242接纳驱动杆支柱224的沿着第一边缘260的、包括翻折突出部230的部分。第二槽部分244接纳第一边缘260的不包括翻折突出部230的部分。槽243a和243b(统称为槽243)构造成接纳驱动杆支柱224的各个突出部234。
82.为了将驱动杆220联接至内轴222,第一驱动杆支柱224a和第二驱动杆支柱224b将被插入槽240a和240b中。例如,驱动杆支柱224a可以从顶表面270沿箭头a1的方向插入槽240a中。一旦将突出部234沿着内轴222的底表面272插入到槽243b中,插入就将停止。类似地,驱动杆支柱224b可以从底表面272沿箭头a2的方向插入槽240b中。一旦将突出部234沿着内轴222的顶表面270插入槽243a中,插入就将停止。如图11和图12中看出的,一旦联接至内轴222,就在翻折突出部230的下表面151与第二边缘262之间保持有间隙253。因此,驱动杆支柱224被单独地联接至内轴222。如本文中所论述的,可以执行其他联接方法。例如,一旦将驱动杆支柱224插入内轴222中,就可以在必要时通过例如但不限于将驱动杆支柱224点焊至内轴222来进一步增强联接。
83.图13至图14示出了联接至内轴302的驱动杆300的另一示例,驱动杆300可以用于钳10中,如本文中所公开的。图13至图14中所示的示例最像图6a至图7b中所示的示例;但是,在图13至图14中,驱动杆支柱306a和306b(统称为驱动杆支柱306)在插入内轴302之前被接合,并且与图7a中的两个槽(122a和122b)相比,内轴302在挠性突片74上包括单个槽304。如本文中所公开的,驱动杆支柱306包括用以接纳引导件的轴向轨道320和用以接纳驱动销44的孔322。
84.驱动杆支柱306具有第一表面308、与第一表面308相反的第二表面310、第一边缘311以及与第一边缘311相反的第二边缘313,其中,第一表面308和第二表面310在第一边缘311与第二边缘313之间延伸。第一边缘311包括翻折突出部312和314。在示例中,翻折突出部312在凹部322近侧定位,并且翻折突出部314在凹部322远侧定位。从翻折突出部312和314延伸有齿部318。在示例中,翻折突出部312和314可以垂直于或基本上垂直于第二表面310延伸。第二边缘313包括凹部317和从第二边缘313延伸的齿部315。也就是说,齿部315可以垂直于齿部318。在示例中,翻折突出部312和314与驱动杆支柱306成一体。在示例中,翻折突出部312和314可以联接至(例如,点焊)至驱动杆支柱306的第一边缘311。
85.在将驱动杆支柱306联接至内轴302之前,将两个驱动杆支柱306放在一起,使得每个驱动杆支柱306的第二面310是对置的。例如,驱动杆支柱306b与驱动杆支柱306a相同,但旋转了一百八十(180)度。当这两个驱动杆支柱306结合在一起时,翻折突出部312和314在这两个驱动杆支柱306a与306b之间保持有间隙340。当翻折突出部312和314上的齿部318在第二边缘313上的齿部315之间延伸时,这两个驱动杆支柱306a与306b被接合。一旦被接合,就可以以类似于将驱动杆支柱80插入内管26(在图6a至图7b中)的方式将驱动杆支柱306插入内管26中,不同之处在于,在图13至图15中所示的示例中,这两个驱动支柱306被接合。
86.如本文中所论述的,驱动杆支柱306可以是相同的板。因此,可以简化驱动杆支柱8306的制造。驱动杆支柱306可以面向彼此地安置。驱动杆支柱306可以插入内轴302的远端
端部中并被简单地卡扣到内轴302中。例如,当驱动杆支柱306插入内轴302(在一起)时,突出部312使挠性突片74向外挠曲(远离纵向轴线a1)并允许驱动杆支柱306被卡扣置于内轴26内。翻折突出部312和另一驱动杆支柱的对应的齿部315可以定位在槽304中。类似地,翻折突出部314和另一个驱动杆支柱的对应的齿部315可以定位在槽84中。在一个示例中,一旦将驱动杆支柱306沿着内轴24卡扣就位,驱动杆支柱306就可以被进一步联接(例如,焊接或以其他方式)至内轴26。在另一示例中,驱动杆支柱306可以在插入内轴之前被联接(例如,焊接)。在另一示例中,驱动杆支柱306可以被焊接(或以其他方式联接)在一起、然后被进一步联接(例如,焊接至内轴)。
87.示例和各种注解
88.这些非限制性示例中的每个非限制性示例可以独立存在,或者可以以各种排列或组合与其他示例中的一个示例或更多个示例组合。
89.示例1提供了一种手术钳,该手术钳包括:驱动销;外轴,所述外轴限定纵向轴线;第一爪部,所述第一爪部以可枢转的方式连接至所述外管,所述第一爪部包括位于所述第一爪部的近端部分处的第一组凸缘,所述第一组凸缘中的每个凸缘包括用于接纳所述驱动销的第一轨道;第二爪部,所述第二爪部连接至所述外轴;内轴,所述内轴位于所述外轴内并且沿着所述纵向轴线延伸;以及驱动杆,所述驱动杆联接至所述内轴并从所述内轴向远端延伸,所述驱动杆包括:一对驱动杆支柱,所述一对驱动杆支柱从所述内轴的远端部分延伸并且定位在所述第一组凸缘的侧向内侧,所述驱动销能够固定至所述一对驱动杆支柱,其中,所述驱动杆能够在所述外轴内平移以沿着所述第一组轨道驱动所述驱动销,从而使所述第一爪部相对于所述第二爪部在打开位置与关闭位置之间移动。
90.在示例2中,示例1的主题可选地包括:其中,所述一对驱动杆支柱中的每个驱动杆支柱包括开口,所述开口构造成接纳所述驱动销,其中,所述开口定位在所述内轴的外表面的侧向内侧。
91.在示例3中,示例2的主题可选地包括:其中,所述驱动杆包括靠近所述开口的第一对轴向轨道,所述第一对轴向轨道布置成在所述第一对轴向轨道中接纳引导件,所述引导件固定至所述外轴。
92.在示例4中,示例1至3的主题可选地包括:其中,所述内轴包括第二对轴向轨道,所述第二对轴向轨道与所述第一对轴向轨道对准并且布置成在所述第二对轴向轨道中接纳所述引导件。
93.在示例5中,示例1至4的主题可选地包括:其中,所述第二爪部以可枢转的方式连接至所述外管,并且其中,所述第二爪部包括位于所述第二爪部的近端部分处的第二组凸缘,所述第二组凸缘中的每个凸缘包括用于接纳所述驱动销的第二轨道,并且其中,所述驱动杆能够在所述外轴内平移以沿着所述第一组轨道和所述第二组轨道驱动所述销,从而使所述第一爪部和所述第二爪部在打开位置与关闭位置之间移动。
94.在示例6中,示例5的主题可选地包括位于所述内轴和所述驱动杆内的刀片,所述刀片沿着所述纵向轴线延伸并且能够平移以在所述第一组凸缘与所述第二组凸缘之间延伸,所述刀片包括构造成接纳所述驱动销的轨道。
95.在示例7中,示例1至6的主题可选地包括位于所述内轴和所述驱动杆内的刀片,其中,所述刀片的第一边缘和所述刀片的第二边缘不接触所述驱动杆。
96.在示例8中,示例1至7的主题可选地包括位于所述内轴和所述驱动杆内的刀片,其中,所述刀片的第一面和所述刀片的第二面不接触所述驱动杆。
97.在示例9中,示例1至8的主题可选地包括:其中,所述驱动杆支柱中的每个驱动杆支柱包括从所述驱动杆支柱的第一边缘延伸的突出部,从而形成l形板。
98.在示例10中,示例1至9的主题可选地包括:其中,所述驱动杆支柱中的至少一个驱动杆支柱包括从限定刀片通道的表面延伸的突出部,使得所述突出部延伸到所述刀片通道中。
99.在示例11中,示例10的主题可选地包括:其中,所述驱动杆支柱中的每个驱动杆支柱包括从限定所述刀片通道的所述表面延伸的突出部,其中,所述驱动杆支柱形成h形梁,使得所述驱动杆支柱中的每个驱动杆支柱的突出部延伸到所述刀片通道中。
100.在示例12中,示例1至11的主题可选地包括:其中,所述一对驱动杆支柱包括具有第一刀片通道表面的第一驱动杆支柱和具有第二刀片通道表面的第二驱动杆支柱,其中,所述第一驱动杆支柱和所述第二驱动杆支柱单独地连接至所述内轴。
101.在示例13中,示例12的主题可选地包括:其中,所述第一驱动杆支柱和所述第二驱动杆支柱不联接在一起。
102.示例14提供了一种手术钳,该手术钳包括:驱动销;外轴,所述外轴沿着纵向轴线延伸;第一爪部,所述第一爪部能够相对于所述外轴枢转,所述第一爪部包括第一组凸缘,每个第一凸缘包括第一轨道,所述第一轨道中接纳所述驱动销;第二爪部,所述第二爪部连接至所述外轴;以及内轴,所述内轴位于所述外轴内并沿着所述纵向轴线延伸;驱动杆,所述驱动杆联接至所述内轴并从所述内轴向远端延伸,所述驱动杆包括:第一驱动杆支柱,所述第一驱动杆支柱从所述内轴延伸并单独地联接至所述内轴;和第二驱动杆支柱,所述第二驱动杆支柱从所述内轴延伸并单独地联接至所述内轴,所述驱动销连接至所述第一驱动杆和所述第二驱动杆,所述驱动杆能够在所述外轴内平移,以使所述驱动销沿着所述第一组轨道平移,从而使所述第一爪部相对于所述第二爪部在打开位置与关闭位置之间移动。
103.在示例15中,示例14的主题可选地包括:其中,所述第二爪部以可枢转的方式连接至所述外管,并且其中,所述第二爪部包括位于所述第二爪部的近端部分处的第二组凸缘,所述第二组凸缘的每个凸缘包括用于接纳所述驱动销的第二轨道,并且其中,所述驱动杆能够在所述外轴内平移以沿着所述第一组轨道和所述第二组轨道驱动所述销,从而使所述第一爪部和所述第二爪部在打开位置与关闭位置之间移动。
104.在示例16中,示例15的主题可选地包括:其中,所述驱动杆定位在所述第一组凸缘和所述第二凸缘的侧向内侧。
105.在示例17中,示例15的主题可选地包括位于所述内轴和所述驱动杆内的刀片,所述刀片沿着所述纵向轴线延伸并且能够平移以在所述第一组凸缘与所述第二组凸缘之间延伸,所述刀片包括构造成接纳所述驱动销的轨道。
106.在示例18中,示例14至17的主题可选地包括沿着所述纵向轴线延伸并且能够平移以在所述第一爪部与所述第二爪部之间延伸的刀片,其中,所述刀片定位在所述第一驱动杆支柱和所述第二驱动杆支柱的侧向内侧。
107.在示例19中,示例18的主题可选地包括:其中,所述刀片的第一边缘和所述刀片的与所述第一边缘相反的第二边缘不被所述第一驱动杆支柱的一部分和所述第二驱动杆支
柱的一部分覆盖。
108.在示例20中,示例14至19的主题可选地包括:其中,所述刀片的所述第一边缘和所述刀片的所述第二边缘不接触所述驱动杆。
109.在示例21中,示例14至21的主题可选地包括:其中,所述刀片的第一面和所述刀片的第二面不接触所述驱动杆。
110.在示例22中,示例14至22的主题可选地包括:其中,所述第一驱动杆支柱独立于所述第二驱动杆支柱并且不接触所述第二驱动杆支柱。
111.示例23提供了一种手术钳,所述手术钳包括:驱动销;外轴,所述外轴限定纵向轴线;第一爪部,所述第一爪部以可枢转的方式连接至所述外管,所述第一爪部包括位于所述第一爪部的近端部分处的第一组凸缘,所述第一组凸缘中的每个凸缘包括用于接纳所述驱动销的第一轨道;第二爪部,所述第二爪部连接至所述外管;内轴,所述内轴位于所述外轴内并沿着所述纵向轴线延伸;驱动杆,所述驱动杆联接至所述内轴并从所述内轴向远端延伸,所述驱动杆包括:一对驱动杆支柱,所述一对驱动杆支柱从所述内轴的远端部分延伸,所述驱动销能够固定至所述一对驱动杆支柱,其中,所述驱动杆能够在所述外轴内平移以沿着所述第一组轨道驱动所述驱动销,从而使所述第一爪部相对于所述第二爪部在打开位置与关闭位置之间移动;以及刀片,所述刀片位于所述内轴和所述驱动杆内,所述刀片能够平移以在所述第一爪部与所述第二爪部之间延伸,其中,所述驱动杆支柱中的每个驱动杆支柱包括从所述驱动杆支柱的第一边缘延伸的突出部,从而形成l形板,并且其中,所述刀片的第一边缘、第二边缘、第一面和第二面不接触所述驱动杆。
112.在示例24中,示例23的主题可选地包括:其中,所述第二爪部以可枢转的方式连接至所述外管,并且其中,所述第二爪部包括位于所述第二爪部的近端部分处的第二组凸缘,所述第二组凸缘的每个凸缘包括用于接纳所述驱动销的第二轨道,并且其中,所述驱动杆能够在所述外轴内平移以沿着所述第一组轨道和所述第二组轨道驱动所述销,从而使所述第一爪部和所述第二爪部在打开位置与关闭位置之间移动。
113.在示例25中,示例23至25的主题可选地包括:其中,所述驱动杆定位在所述第一组凸缘和所述第二组凸缘的侧向内侧。
114.示例26提供一种形成手术钳的一部分的方法,所述方法包括:将第一驱动杆支柱联接至内轴,使得所述第一驱动杆支柱的一部分从所述内轴向远端延伸,以及将第二驱动杆支柱与所述第一驱动杆支柱分开地联接至所述内轴,使得所述第一驱动杆支柱的一部分从所述内轴向远端延伸,其中,所述第一驱动杆支柱和所述第二驱动杆支柱具有定位在所述内轴的外表面的侧向内侧的远端端部。
115.在示例27中,示例26的主题可选地包括:其中,将所述第一驱动杆支柱联接至所述内轴以及将所述第二驱动杆支柱联接至所述内轴包括:将所述第一驱动杆支柱插入到所述内轴的远端开口中以将所述第一驱动杆支柱卡扣至所述内轴,以及将所述第二驱动杆支柱插入到所述内轴的所述远端开口中以将所述第一驱动杆支柱卡扣至所述内轴。
116.在示例28中,示例26至27的主题可选地包括:将所述第一驱动杆支柱联接至所述内轴以及将所述第二驱动杆支柱联接至所述内轴包括:将所述第一驱动杆支柱插入到沿着所述内轴的顶表面的第一轴向槽中;以及将所述第二驱动杆支柱插入到沿着所述内轴的底表面的第二轴向槽中。
117.在示例29中,示例26至28的主题可选地包括:其中,所述第一驱动杆支柱与所述第二驱动杆支柱相同。
118.示例30是示例1至29的示例或要素中的任一者或组合。
119.上述详细描述包括对附图的参照,这些附图形成详细描述的一部分。作为说明,附图示出了可以实践本发明的具体实施方式。这些实施方式在本文中也被称为“示例”。这些示例可以包括除了所示出的或描述的要素之外的要素。然而,本发明的发明人还设想到仅提供所示出或所描述的那些要素的示例。此外,本发明的发明人还设想到使用关于本文中示出或描述的特定示例(或其一个或更多个方面)或关于其他示例(或其一个或更多个方面)示出或描述的那些要素的任何组合或排列的示例(或其一个或更多个方面)。
120.上述详细描述包括对附图的参照,这些附图形成详细描述的一部分。作为说明,附图示出了可以实践本发明的具体的实施方式。这些实施方式在本文中也被称为“示例”。这些示例可以包括除了所示出的或描述的要素之外的要素。然而,本发明的发明人人还设想到仅提供所示出或所描述的那些要素的示例。此外,本发明的发明人还设想到使用关于本文中示出或描述的特定示例(或其一个或更多个方面)或关于其他示例(或其一个或更多个方面)示出或描述的那些要素的任何组合或排列的示例(或其一个或更多个方面)。
121.在本文献中,如在专利文献中常见的那样,不管“至少一个”或“一个或更多个”的任何其他实例或用法,使用术语“一”或“一种”来包括一个或多于一个。在本文献中,除非另有说明,否则术语“或”用于指非排他性的或,使得“a或b”包括“a但不是b”、“b但不是a”以及“a和b”。在本文献中,术语“包括”和“在......中”用作相应术语“包含”和“其中”的简明英语等同物。另外,在所附权利要求中,术语“包括”和“包含”是开放式的,也就是说,包括除权利要求中的这样的术语之后列出的那些要素之外的要素的系统、装置、物品、结合物、配方或过程仍然被认为落在该权利要求的范围内。此外,在所附权利要求中,术语“第一”、“第二”和“第三”等仅用作标记,并不旨在对其对象施加数值要求。
122.上面的描述旨在是说明性的,而不是限制性的。例如,以上描述的示例(或示例的一个或更多个方面)可以彼此结合使用。本领域普通技术人员在查阅以上描述后可以使用其他实施方式。所提供的摘要符合37c.f.r.
§
1.72(b),以使得读者能够快速确定本技术公开内容的性质。提交了摘要并理解:摘要将不会被用来解释或限制权利要求的范围或含义。另外,在上面的具体描述中,各种特征可以被结合在一起以组织本公开内容。这不应当被解释成意为:对于任何权利要求而言,未要求保护的公开特征均是必要的。确切地说,发明主题可能在于少于特定公开的实施方式的所有特征。因此,所附权利要求由此作为示例或实施方式并入到具体实施方式中,其中,每项权利要求独立作为单独的实施方式,并且预期这样的实施方式可以以各种结合或置换的方式相互结合。本发明的范围应该参照所附权利要求以及这些权利要求的等同物的全部范围来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1