用于使用图像捕获设备来确定受试者的眼睛的屈光特征的方法和系统与流程
1.本发明涉及用于确定受试者的眼睛的屈光特征的方法和系统。
背景技术:
2.许多文件描述了用于确定这种屈光特征的设备和方法。
3.特别地,用于确定受试者的屈光的客观值的自动验光方法是已知的。这些方法复杂,并且有时费时。这些方法通常意味着使用需要有资质的人员操纵的大型且昂贵的设备。
4.特别地,这些方法需要使用具有放置在同一平面上的相机和多个光源的特定仪器。
5.因此,对这些自动验光方法的获取是有限的,并且大部分世界人口没有从它们当中受益。
技术实现要素:
6.因此,本发明的一个目的是提供一种用于确定受试者的眼睛的屈光特征的新方法,该方法将被简化,因为该方法不需要特定材料的使用或有资质人员的干预。
7.更确切地说,本发明在于一种用于使用图像捕获设备来确定受试者的眼睛的屈光特征的方法。所述方法包括以下步骤:
[0008]-获取受试者的眼睛的视网膜的至少一张照片;以及
[0009]-基于视网膜的所述获取的照片的模糊水平而确定所述屈光特征,照片的模糊水平是使用与所述照片相关联的点扩展函数的值来确定的,所述屈光特征是通过计算与视网膜的所述获取的照片的初始模糊水平相比具有降低的模糊水平的经修改的照片来确定的。
[0010]
这种方法可以由受试者自身实现,并且只使用智能电话或平板计算机进行而不需要添加光学部件或使用增强现实显示器进行。因此,这种方法可以被广泛范围的人群获取,包括被排除在对现有方法的获取之外的一些人群。
[0011]
该方法的其他有利特征是以下特征:
[0012]-所述屈光特征是通过使用将视网膜的所获取的照片的所述模糊水平与屈光特征相关的模型来确定的;
[0013]-该方法进一步包括至少获取受试者的眼睛的瞳孔的照片的步骤,确定所述屈光特征的步骤取决于从瞳孔的所述照片中确定的瞳孔直径;
[0014]-模糊水平是使用卷积神经网络来确定的;
[0015]-神经网络是使用多对图像的数据集来训练的,每对图像与特定屈光特征相关联;
[0016]-该方法进一步包括通过使用用多对图像的数据集进行的神经网络的训练来确定与视网膜的所获取的照片相关联的点扩展函数的值的步骤;
[0017]-该方法进一步包括通过使用用多对图像的数据集进行的神经网络的训练来确定与视网膜的所获取的照片相关联的屈光特征的步骤;
[0018]-经修改的照片是使用视网膜的所获取的照片的盲反卷积方法来计算的;
[0019]-盲反卷积方法基于点扩展函数的值的数据集,点扩展函数的每个值与特定屈光特征相关联;
[0020]-经修改的照片是通过在点扩展函数的所述值的数据集中选择点扩展函数的最佳值来确定的,点扩展函数的最佳值对应于经修改的照片中与视网膜的所获取的照片的初始对比度水平相比提高的对比度水平;
[0021]-视网膜的照片是在无限远的焦距下获取的;
[0022]-受试者的眼睛与图像捕获设备之间的距离大于20mm;并且
[0023]-该方法进一步包括获取受试者的眼睛的视网膜的另一照片的步骤,所述另一照片是在包含在视网膜的所述获取的照片的焦距与眼睛的瞳孔的所述照片的焦距之间的另一焦距下获取的,所述屈光特征还取决于视网膜的所述另一照片,所述另一获取的照片适合于确定屈光特征的符号,屈光特征的符号是通过在视网膜的所述另一获取的照片与视网膜的所述获取的照片之间比较模糊水平来确定的。
[0024]
本发明还包括一种用于确定受试者的眼睛的屈光特征的系统,包括:
[0025]-图像捕获设备,该图像捕获设备适合于获取受试者的眼睛的视网膜的至少一张照片;以及
[0026]-数据处理器,该数据处理器适合于基于视网膜的所述获取的照片的模糊水平而确定所述屈光特征,照片的模糊水平是使用与所述照片相关联的点扩展函数的值来确定的,所述屈光特征是通过计算与视网膜的所述获取的照片的初始模糊水平相比具有降低的模糊水平的经修改的照片来确定的。
[0027]
该系统进一步包括适合于容纳所述图像捕获设备和所述数据处理器的壳体。
[0028]
该系统进一步包括适合于容纳所述图像捕获设备的壳体,所述壳体还包括适合于将视网膜的所述获取的照片发送到数据处理器以及从数据处理器接收所述屈光特征的电子实体。
[0029]
该系统进一步包括适合于照射受试者的眼睛的瞳孔的光源。
具体实施方式
[0030]
结合通过非限制性示例方式给出的附图给出的以下说明将允许理解组成本发明的内容及如何才能实施本发明。
[0031]
在附图中:
[0032]-图1示出了根据本发明的适于确定受试者的眼睛的屈光特征的示例性系统;
[0033]-图2示出了根据本发明的适于确定受试者的眼睛的屈光特征的另一个示例性系统;
[0034]-图3示出了对应于根据本发明的用于确定受试者的眼睛的屈光特征的方法的第一示例性流程图;
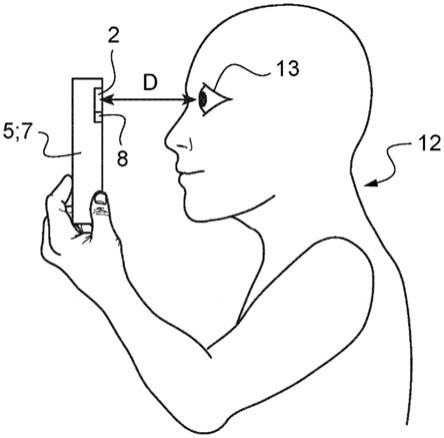
[0035]-图4是系统确定受试者的眼睛的屈光特征的配置的示意图;以及
[0036]-图5示出了对应于根据本发明的用于确定受试者的眼睛的屈光特征的方法的第二示例性流程图。
[0037]
图1和图2示出了适于确定受试者12(图4)的眼睛13的屈光特征的示例性系统1、
10。在本说明书中,可以确定的屈光特征包括受试者的眼睛的屈光不正的球镜度sph、此屈光不正的柱镜度c以及对应柱镜的轴位的取向θ。
[0038]
在下文中,由系统1、10的两个示例共享的元件具有相同附图标记,并且仅被描述一次。
[0039]
系统1、10包括图像捕获设备2和数据处理器4。可选地,系统1、10包括光源8。
[0040]
图像捕获设备2是小型通用数字相机。图像捕获设备2适合于获取受试者12的眼睛13的视网膜的至少一张照片。
[0041]
图像捕获设备2例如位于系统1、10的朝受试者12的方向定向的面上。图像捕获设备2通常包括例如由光轴限定的镜头。图像捕获设备2例如是系统1、10中所包含的相机。图像捕获设备2包括例如电动聚焦设备(未示出),该电动聚焦设备允许在拍摄照片的同时改变焦距。
[0042]
可选的光源8包括例如一个或若干个led(“发光二极管”)或小的电弧灯。光源8适合于照射受试者12的眼睛13的瞳孔。
[0043]
可选的光源8位于图像捕获设备2附近,特别是位于所述图像捕获设备2的镜头的光轴附近。在相机的情况下,可选的光源8可以是相机中所包括的内置闪光灯。
[0044]
优选地,光源8使用近红外光以避免瞳孔反射并保持受试者12的眼睛13的瞳孔的良好直径。作为替代,光源8可以使用白光或红色波长。
[0045]
数据处理器4适合于基于由图像捕获设备2获取的照片而确定屈光特征。数据处理器4与存储器(未示出)相关联。存储器存储指令,在这些指令由数据处理器4执行时,这些指令允许系统1、10实现如下所述的用于确定受试者12的眼睛13的屈光特征的方法。
[0046]
根据图1所示的示例性系统1,系统1包括壳体5。此壳体5适合于容纳图像捕获设备2和数据处理器4。在这种情况下,壳体例如是便携式电子设备,比如智能电话或平板计算机。
[0047]
根据图2所示的另一个示例性系统10,系统10包括壳体7。壳体7适合于容纳图像捕获设备2。在这种情况下,数据处理器4位于系统10的壳体7的外部。
[0048]
此处,壳体7还包括电子实体6。此电子实体6适合于将所获取的受试者12的眼睛13的照片发送到数据处理器4,并且适合于从数据处理器4接收屈光特征(在其确定之后)。在这种情况下,壳体7例如是便携式电子设备,比如基本相机。
[0049]
作为替代,系统可以包括附加镜头9。此附加镜头9的光轴在这里与图像捕获设备2的镜头的光轴对准。此附加镜头9用于增大由图像捕获设备2获取的照片的视场。
[0050]
图1和图2所示并且先前描述的系统1、10适合于执行用于确定受试者12的眼睛13的屈光特征的方法。图3和图5示出了对应于根据本发明的用于确定受试者12的眼睛13的屈光特征的方法的示例性流程图。
[0051]
图3描述了用于确定受试者12的眼睛13的屈光特征的方法的第一实施例的主要步骤的示意图。图5描述了用于确定受试者12的眼睛13的屈光特征的方法的第二实施例的主要步骤的示意图。
[0052]
在下文中,两个实施例共享的步骤具有相同附图标记,并且仅被描述一次。
[0053]
如图3所示,该方法的第一实施例始于步骤s2,在该步骤中,受试者12将系统1的壳体5、7布置在其面部之前。特别地,图像捕获设备2的方向被确定成使得图像捕获设备可以
直接获取受试者12的眼睛13(视网膜和瞳孔)的照片。图4中示出了这种配置。实际上,系统1的壳体5、7可以由受试者12或支撑物(未示出)固持。
[0054]
实际上,图像捕获设备2位于受试者12的眼睛13附近。受试者12的眼睛13与图像捕获设备2之间的距离d典型地大于20毫米(mm),例如,介于20mm到100mm之间。
[0055]
如图3中可见,该方法接着包括步骤s4:照射受试者12的眼睛13的瞳孔。实际上,照射适于避免瞳孔的小直径。优选地,照射来自光源8的弱光或室内照明。
[0056]
该方法继续进行步骤s6:获取在先前步骤s4中被照射的受试者12的眼睛13的至少一张照片。为了减少眼睛13的调节,受试者12在此步骤中向前看得很远。
[0057]
在此步骤s6期间,在子步骤s6a,获取受试者12的眼睛13的视网膜的至少一张照片。优选地,这里,获取受试者12的眼睛13的视网膜的两张不同照片。
[0058]
视网膜的第一照片(在下文中又称为“视网膜的参考照片”)是在无限远的焦距下获取的。为了获取视网膜的此参考照片,图像捕获设备2位于距受试者12的眼睛13的大焦距处,例如,位于大于4m的焦距处。
[0059]
受试者12的眼睛13的视网膜的第二照片是以介于视网膜的所获取的参考照片的焦距与图像捕获设备2之间的另一焦距获取的。
[0060]
步骤s6还包括子步骤s6b:至少获取受试者12的眼睛13的瞳孔的照片。受试者12的眼睛13的瞳孔的照片是以比获取眼睛13的视网膜的照片的焦距小的焦距获取的。
[0061]
作为示例,图像捕获设备2中所包含的电动聚焦设备可以用于改变焦距,以便获取眼睛13的瞳孔的照片、参考照片和视网膜的第二照片。
[0062]
这里,三张照片的序列(组合子步骤s6a和s6b)是在短时间间隔(例如,小于0.5秒(s))内拍摄的。此短时间间隔确保了三张照片的相同条件,并因此提高了进一步分析的精度。
[0063]
参考先前所述的获取照片的不同焦距,实际上,对于此步骤s6,可以将电动聚焦设备定位在第一焦距处(例如,最近焦距或最远焦距),并且获取照片,接着将电动聚焦设备移动到第二焦距(例如,中间焦距),并且获取另一照片,最后再次将电动聚焦设备移动到最后焦距,并且获取最后照片(不超过时间限制)。
[0064]
如图3所示,该方法接着包括步骤s8。在此步骤期间,将所获取的照片传输到数据处理器4以便进行分析。
[0065]
这里,分析(以及因此屈光特征的确定)是基于视网膜的参考照片的模糊水平。
[0066]
在本说明书中,照片的表述“模糊水平”与图像的聚焦程度的度量相关联,例如如s.petruz、d.puig、m.a.garcia的文章“analysis of focus measure operators in shape-from-focus[用于聚焦形貌恢复的聚焦度量算子的分析]”(图案识别,46,2013,1415-1432)中所介绍。高聚焦程度与低模糊水平相关(因此,图像清晰)。
[0067]
作为替代,照片的对比度水平可以与模糊水平相关联。对比度水平例如是使用傅立叶变换分析来确定的。高对比度水平与低模糊水平相关(因此,图像清晰)。作为示例,可以逐个像素地确定照片的对比度水平。
[0068]
有利地,由于本发明,模糊水平的确定使得能够导出屈光特征,比如受试者12的眼睛13的屈光不正的球镜度sph。
[0069]
实际上,照片的模糊水平是使用与照片相关联的点扩展函数(又称为psf)的值来
确定的。事实上,点扩展函数的表面(又称为“扩展”)与模糊水平直接相关,因为点扩展函数取决于眼睛的屈光不正。扩充点扩展函数是指相关联的图像非常模糊,而窄点扩展函数与清晰图像相关。
[0070]
然而,屈光特征无法以经典方式容易且直接地从点扩展函数的值导出。点扩展函数的多个值存储在数据处理器4的存储器中。点扩展函数的这多个值例如理论上是从如下所述的任意屈光特征确定的。
[0071]
经典的球柱镜特征(球镜s、柱镜c、取向θ)通常由正交值(sph、j0、j45)的三元组表示,该三元组被定义为球镜度和两个杰克逊交叉柱镜,这两个杰克逊交叉柱镜一个在轴位0
°
,具有光焦度j0=c
×
cos(2θ),并且另一个在轴位45
°
,具有光焦度j45=c
×
sin(2θ),作为散光(c,θ)的极坐标形式的散光分解。
[0072]
正交值(sph、j0、j45)的这种三元组接着用于确定泽尼克系数:其中r是光瞳光线。最后,从这些泽尼克系数,可以如下导出波前w(ρ,θ)的表达式:接着,通过确定傅里叶变换和平方模数,理论上直接从波前计算点扩展函数的值。接着,在执行根据本发明的方法之前,确定点扩展函数的多个理论值。
[0073]
在这里,在步骤s10,使用点扩展函数的所确定的多个理论值和对应的屈光特征,确定受试者12的眼睛13的视网膜的参考照片的点扩展函数的测量值。
[0074]
有利地,根据图3所示的方法的第一实施例,使用卷积神经网络确定与视网膜的参考照片相关联的点扩展函数的测量值。
[0075]
正如经典方法一样,卷积神经网络在使用前经过训练。在这里,卷积神经网络是在执行根据本发明的方法之前训练的。
[0076]
卷积神经网络是使用给定瞳孔直径的多对图像的数据集来训练的。每对图像包括受试者的眼睛的视网膜的模糊图像和相关联的不模糊图像。实际上,不模糊图像对应于与相关联的模糊图像的初始模糊水平相比具有降低的模糊水平的经修改的照片。实际上,经修改的照片呈现更好的聚焦程度或更好的对比度水平。
[0077]
每对图像都与点扩展函数的特定值相关联,并因此与特定屈光特征相关联。视网膜的不同对图像用模型模拟,因此允许产生许多对图像。对于训练部分,使用与用相关联的点扩展函数卷积的不模糊图像生成模糊图像。
[0078]
在这里,卷积神经网络例如是使用该对图像中的模糊图像作为输入数据并使用点扩展函数的相关联的值作为输出数据来训练的。
[0079]
在步骤s10,将受试者12的眼睛13的视网膜的参考照片作为卷积神经网络的输入引入。由于先前执行的训练,在卷积神经网络的输出处获得了与视网膜的这个参考照片相关联的点扩展函数的测量值。
[0080]
在通过在步骤s6b中获取的受试者12的眼睛13的瞳孔的照片而知道受试者12的瞳孔直径的情况下,继而可以例如通过使用泽尼克系数而提取屈光特征。实际上,此步骤s10包括最小化点扩展函数的测量值与存储在数据处理器4的存储器中的点扩展函数的多个理
论值之一之间的差值的步骤。最小差值允许确定点扩展函数的对应理论值,并因此确定相关联的屈光特征。
[0081]
作为替代,卷积神经网络可以是使用该对图像中的模糊图像作为输入数据并使用相关联的屈光特征作为输出数据来训练的。在步骤s10,通过在卷积神经网络中引入受试者12的眼睛13的视网膜的参考照片,在卷积神经网络的输出处直接获得屈光特征。
[0082]
作为另一个替代,卷积神经网络可以是使用该对图像中的模糊图像作为输入并使用该对图像中的不模糊图像作为输出来训练的。在这种情况下,通过在卷积神经网络中引入视网膜的参考照片,在卷积神经网络的输出处获得与视网膜的参考照片的初始模糊水平相比具有降低的模糊水平的相关联的经修改的照片。因为根据定义,受试者12的眼睛13的视网膜的参考照片是通过经修改的照片和点扩展函数的相关联的值的反卷积来确定的,所以这个值可以使用传统的反卷积方法从两个图片导出。于是可以例如通过使用如前所述的泽尼克系数,使用瞳孔直径来提取屈光特征。
[0083]
最后,在步骤s12中,使用受试者12的眼睛13的视网膜的所获取的第二照片来阐明屈光特征。特别地,视网膜的此第二照片适合于确定屈光特征的符号,并因此确定屈光不正的符号(以便识别近视眼或远视眼)。因为点扩展函数的值对于正和负屈光不正参数都是相同的,所以由于视网膜的此第二照片,屈光异常被完全识别。
[0084]
屈光特征的符号是通过在视网膜的第二照片与视网膜的参考照片之间比较例如基于对比度水平的模糊水平来确定的。如果视网膜的第二照片的模糊水平高于视网膜的参考照片的模糊水平,那么识别出近视眼。如果视网膜的第二照片的模糊水平低于参考照片的模糊水平,那么屈光不正与远视眼有关联。
[0085]
作为另一个示例,如果壳体7是智能电话,那么焦距范围在70mm与无限远之间。因为视网膜的图像是在与球镜度的倒数相反的焦距处形成的,所以此参数为正。
[0086]
图5描述了用于确定受试者12的眼睛13的屈光特征的方法的第二实施例的主要步骤的示意图。
[0087]
如图5所示,用于确定受试者12的眼睛13的屈光特征的方法的此第二实施例还包括先前描述的步骤s2到s8。
[0088]
如前所述,这里,分析(以及因此屈光特征的确定)是基于视网膜的参考照片的模糊水平的分析。
[0089]
有利地,通过本发明,模糊水平的确定使得能够导出屈光特征,比如受试者12的眼睛13的屈光不正的球镜度。
[0090]
在该方法的此第二实施例中,参考照片的模糊水平是使用与此照片相关联的点扩展函数的值来确定的。因此,在步骤s20,确定受试者12的眼睛13的视网膜的参考照片的点扩展函数的值。
[0091]
有利地,根据图5所示的方法的第二实施例,视网膜的参考照片的点扩展函数的此值是使用盲反卷积方法来确定的。将这种盲反卷积方法应用于视网膜的参考照片,以便同时确定与视网膜的参考照片的初始模糊水平相比具有降低的模糊水平的经修改的照片以及点扩展函数的相关联的值。这里使用的盲反卷积方法是例如迭代方法,比如lucy-richardson反卷积方法或bayesian法反卷积方法。作为另一个示例,盲反卷积方法可以是非迭代方法,比如seddara反卷积方法或基于倒谱的方法。
[0092]
这里,反卷积方法基于点扩展函数的值的数据集。针对给定瞳孔直径的不同屈光特征,计算点扩展函数的不同值。事实上,这里,数据集的点扩展函数的每个值都与特定屈光特征相关联。
[0093]
通过在点扩展函数的值的数据集中确定点扩展函数的最佳值,导出在该方法的输出处获得的经修改的照片。换句话说,通过在点扩展函数的值的数据集中优化点扩展函数的值来获得经修改的照片。
[0094]
这里,点扩展函数的最佳值是考虑到与视网膜的参考照片的初始对比度水平相比具有提高的对比度水平的经反卷积的照片来确定的。又被称为“经修改的照片”的此照片因此比视网膜的参考照片清晰(其模糊水平因此较低)。
[0095]
一旦确定了点扩展函数的值,并且通过在步骤s6b获取的受试者12的眼睛13的瞳孔的照片而知道了受试者12的瞳孔直径,就可以例如通过使用如前所述的泽尼克系数来提取屈光特征。
[0096]
最后,在步骤s22(类似于先前描述的步骤s12),使用受试者12的眼睛13的视网膜的所获取的第二照片来阐明屈光特征,以便确定屈光特征的符号,并且因此确定屈光不正的符号(以便识别近视眼或远视眼)。
[0097]
已结合被认为是最实用且优选的实施例的内容描述了本发明。应理解,本发明不限于所披露的实施例,而是旨在涵盖包含在最广泛的解释和等同布置的精神和范围内的各种布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1