X射线成像系统和用于牙科X射线成像的方法与流程
x射线成像系统和用于牙科x射线成像的方法
技术领域
1.本技术总体上涉及x射线成像系统和用于牙科x射线成像的x射线成像方法。
背景技术:
2.在计算机断层造影(ct)x射线成像中使用的已知牙科x射线成像系统要求待成像的患者位于x射线源和x射线检测器之间,因此可以通过x射线源照射患者并且通过x射线检测器接收穿透的辐射。在x射线检测器中将所接收的辐射转换成x射线图像数据的形式,然后在从患者重建三维(3d)ct体积中使用该图像数据。
3.在x射线曝光期间,通过头部支撑件将定位的患者支撑到成像位置。进行支撑是为了在暴露持续的时间内保持患者静止。该支撑件包括支撑患者下颚的端部的下部架,和支撑患者的太阳穴的太阳穴支撑件。
4.在成像中,患者的定位和支撑是最耗时的任务,并且无论已如何正确和仔细地支撑患者,都难以完全防止患者在曝光期间的不期望的移动。患者的存在的移动导致了跨重建的ct体积的图像伪影,例如,圆形对象可能产生尖角或变成椭圆形,尖锐特征变得模糊,并且射束硬化伪影被夸大。
技术实现要素:
5.本发明的一个目的是克服已知解决方案的缺点,并提供一种x射线成像系统,其能够在患者曝光期间在移动的患者坐标系中同时定位x射线源和检测器几何结构,x射线曝光无需对患者头部的任何支持,间接几何结构校准,以及相对于系统或环境连续跟踪几何结构校准漂移。
6.本发明的一个目的通过提供根据独立权利要求的成像系统、成像方法、计算机程序和计算机可读介质来实现。
7.本发明的实施例由根据独立权利要求的成像系统、成像方法、计算机程序和计算机可读介质来指定。
8.一种用于牙科x射线成像的x射线成像系统包括控制器、旋转台架、用于发射x射线的x射线源和用于从源接收x射线的x射线成像检测器。台架包括源和检测器。控制器被配置为控制源发射x射线辐射并且控制检测器接收所发射的辐射以获取x射线图像数据。该系统还包括:深度信息产生相机,其被配置成产生深度信息;以及位置信息产生部件,其被配置成产生位置信息,用于在照射期间,与要重建的图像数据同步地,获取至少深度信息产生相机和检测器的位置数据。
9.一种用于牙科x射线成像的x射线成像方法,其由前述的x射线成像系统执行,包括呈现具有深度信息产生相机和位置信息产生部件的x射线成像系统的步骤。该方法还包括由系统的控制器控制旋转台架中的x射线源和x射线检测器以获取x射线图像数据的步骤。该方法还包括在图像数据的获取期间,由深度信息产生相机连同位置信息产生部件,与要重建的图像数据同步地,获取至少深度信息产生相机和检测器的位置数据的步骤。
10.一种包括指令的计算机程序,当所述程序根据前述x射线成像系统由计算机执行时,所述指令使所述计算机至少执行前述x射线成像方法的步骤。
11.一种有形的非易失性计算机可读存储介质包括前述的计算机程序。
附图说明
12.参考以下附图解释本发明的示例性实施例:
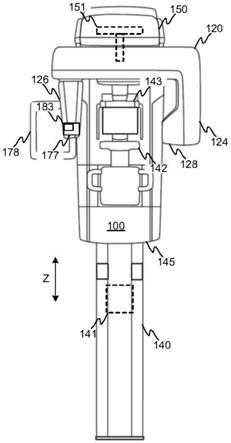
13.图1a从前面呈现了x射线成像系统;
14.图1b从上方呈现了成像系统及其台架的成像移动;
15.图2呈现了x射线成像方法的流程图;
16.图3呈现了成像系统的部分。
具体实施方式
17.图1a示出了用于在牙科x射线成像中(例如在口腔外牙科x射线成像中)从对象(例如患者或校准目标)获取图像数据的x射线成像系统(单元)100。所获取的图像数据用于形成二维(2d)x射线图像或用于从至少部分的成像对象重建三维(3d)x射线体积。
18.系统100用于执行至少计算机断层摄影(ct)成像,例如锥束ct(cbct)成像或其他类型的ct成像,其从被成像对象形成(产生)用于重建3d体积的图像数据。系统100还可以用于执行全景成像,这产生用于形成全景2d图像的图像数据,如图中所示的系统100。如果系统100配备有头部测量成像所必需的并且产生用于形成头部测量2d图像的图像数据的部分,则系统100还可以用于进行头部测量成像。
19.系统100包括旋转台架(台架部分、旋转器)120,其实现为并支撑x射线源(源部分、头)124和x射线成像检测器(成像检测器部分、头)126,它们用于获取图像数据以至少重建3d体积。如果必要的部分存在,源和检测器124、126也可以用于获取图像数据,以形成全景2d图像和头部测量2d图像。
20.台架120可以具有字母c的形式,如图1a和1b所示,于是源124可以附着在台架120的一端上,而检测器126可以附着在台架120的另一端上,使得源和检测器124、126彼此相对。
21.源124包括x射线源,其发射x射线,即产生x射线束,用于至少ct成像,其可以是cbct成像,其中射束是锥形射束,或者备选的ct成像,其中射束是金字塔形射束、半月形锥形射束或其它形状的射束。源124也可以用于全景成像。
22.检测器126包括至少一个x射线检测器,例如一个或两个x射线检测器,其接收从源124发射的x射线(射束)并且从x射线曝光的(即成像的)对象生成图像数据。所接收的图像数据用于形成全景图像或从对象重建3d体积。
23.单传感器(单一传感器)检测器126包括全景传感器、全景/ct组合传感器、全景/ct/头部测量组合传感器或全景/ct传感器,其也能够进行一次头部测量成像。单传感器检测器126可以是可调节的,使得可以相对于台架120旋转和/或移动传感器(检测器126),以优选地将其垂直(朝向)于源124定位。
24.双传感器检测器126可以包括全景传感器和ct传感器,或者头部测量传感器(其也能够实现全景成像)以及ct传感器。双传感器检测器126可以是可调节的,从而有几种方式
来附接传感器,并且可以改变位于光束中的传感器。所使用的传感器优选地垂直于源124定位。
25.或者,检测器126可以是固定的。
26.台架120还包括用于源124的准直器(准直器部分,x射线射束限制)128,其准直来自源124的射束。准直器128可以被附接在源124的前面,并且它在成像期间控制射束的尺寸和形状,以使得射束匹配所选成像模式(协议)(例如ct或全景成像模式)、所选图像尺寸和相关传感器尺寸的需要。
27.系统100还包括柱(柱部分)140,其支撑系统100,并且使其高度z以及同时使台架120的高度适应于ct或全景成像的对象的高度。
28.系统100可以包括形成结构的托架(托架部分)145,其可以提供上/下z移动,和用于适于同时移动的其它部分的支撑件。
29.柱140包括高度适配器(适配部分)141,如果系统100包括托架145,则该高度适配器引起托架145的上/下z移动。适配器141可以包括例如高度电机、齿轮、螺杆和将z移动实现为伸缩或平衡移动的伸缩或平衡部分。高度电机驱动适配器141的其它部分,用于适配托架145的高度。
30.系统100还可以包括患者支撑件(支撑部分)142、143,其用于在ct或全景成像中支撑对象,如图1a和1b所示,但不是必须的。患者支撑件142、143可以包括附接到托架145的下部架142和太阳穴支撑件143。下部架142可以支撑对象的下颚的末端,并且太阳穴支撑件143可以支撑对象的前额或太阳穴。
31.系统100还包括支撑台架120上部架150并允许台架120相对于上部架150移动。上部架150可以通过固定接头附接到托架145。
32.台架120可以利用允许台架120围绕其旋转轴122旋转并相对于上部架150移动的附接器(附接部分)151附接到上部架150。
33.托架145可以包括下部架142、太阳穴支撑件143、上部架150和台架120,因此,当高度适配器141实现z移动时,高度适配器141适配部分142、143、150、120的高度。
34.系统100 120还包括能够产生深度信息的相机(相机部分)177。深度感测相机177可以包括光学相机(例如,彩色或单色相机)和深度相机(例如,红外(ir)相机),其中光学相机或深度相机用作主相机。或者,相机177可包括两个光学相机,例如两个彩色或单色相机,其中一个光学相机用作主相机。或者,相机177可包括飞行时间(tof)相机。相机177可以附接到台架120,使得至少其主光学相机与检测器126连接安装。其他相机,即,替代方案中的深度相机和非主光学相机,也可以与台架120连接安装,例如,与检测器126连接,或者与系统100的其他部分连接安装,例如,如果存在柱140或托架145的话。
35.系统100还包括位置信息产生部件183,其能够确定相机177的至少主相机的位置,即,其能够产生相机177的至少主相机的位置数据。位置信息产生部件183可以是例如惯性测量器(imu)。位置信息产生部件183可以安装在例如如图1a和1b所示的台架120中,或者安装在托架145的柱140中,如果存在的话。
36.图1b呈现了附接器151如何允许台架120的旋转移动(r移动),以便台架120可以围绕其旋转轴122旋转多达400度。该r移动可以用于ct成像、全景成像或这两种成像模式。
37.附接器151还可以允许台架120的第一线性y移动,使得在成像的成像(扫描)移动
之前和在成像期间(具有或不具有照射的成像移动),可以相对于上部架150沿着y移动调整(定位)其旋转轴122,并且因此调整其旋转中心。y移动平行于上部架150。
38.附着器151还可以允许第二线性x移动,使得在成像的成像移动之前和在成像期间,旋转轴122可以在由x和y移动限定的平面内被调整。x移动垂直于y移动。
39.附接器151还可以允许第三na移动,其相对于台架120移动旋转轴122。旋转轴122沿着射束的na移动可以用于改变ct和全景成像模式内的放大率。
40.附接器151还可以允许第四n
p
移动,其垂直于射束移动旋转轴122。它可以用于ct成像中的偏移成像和对称成像之间的改变,由此影响视场(fov)。
41.替代地,代替图1a和1b中所呈现的固定接头,上部架150可以通过枢转接头(未呈现)附接到柱140或托架145(如果存在),这使得上部架150能够围绕柱140(托架145)并且相对于患者支撑件142、143(如果存在)枢转移动,使得台架120在例如待成像的患者将被定位到的位置(患者支撑体142、143)上方。
42.在系统100的这个备选实施例中,附接器151还允许台架120进行前述解释的旋转r和线性移动,使得台架120可以围绕其旋转轴122旋转高达400度,并且台架120可以相对于上部架150线性移动,例如平行地移动或者相对于平行方向成一定角度地移动。
43.在系统100的该替代实施例中,附接器151能够移动至少一个线性移动,使得旋转轴212以及因此相对于上部架150的旋转中心能够沿着线性移动被调节。这样,旋转轴122可以被定位在由上部架150的枢转移动和在成像期间旋转台架120的(一个或多个)线性移动限定的平面内。
44.系统100的替代实施例的移动和必要部件已经在公开的专利申请fi 20145617中更精确地提出。
45.系统100还包括旋转电机(未示出),其在其相对于下部架142定位以使得台架120在下部架142上方期间和/或在成像期间如前述由附接器151旋转和/或移动台架120。旋转电机可以在台架120中或在上部架150中。
46.系统100可以包括第一移动电机,其在台架120的定位期间和/或在成像期间移动准直器128和/或检测器126。第一移动电机可以在台架部分120或上部架150中。
47.系统100可以使用r移动并且在ct成像的成像阶段期间读出ct检测器,从而得到3d体积的图像数据。系统100还可以在ct成像的成像阶段期间使用x和/或y移动。
48.系统100可以产生感兴趣区域(roi)的投影x射线图像,使得roi的中心和r运动重合。有效旋转角度(孔径)可以是appr.180-360度,取决于系统100。
49.系统100可以在全景成像的成像阶段期间使用r、x和y移动中的至少一个移动,从而得到全景图像的图像数据。
50.如果上部架子150通过如前所述的枢轴接头附接,则系统100可以在ct和全景成像的成像阶段期间使用r-、枢轴、线性移动的至少一种移动。
51.图2呈现了例如在借助于系统100执行的ct成像中的x射线成像方法201,其在前面的附图的上下文中解释。
52.在步骤202,系统100呈现源124、检测器126、相机177和位置信息产生部件183。系统100的操作员启动系统100,于是系统100初始化其自身,以便从源126获取图像数据,从相机177获取相机数据,以及从位置信息产生部件183获取位置数据,这些数据用于校准部分
124、126、177以及重建被成像对象的3d体积。
53.在步骤204,操作者在基于至少一个预定状况检测到校准需要之后,通过其用户接口(ui,用户接口部件)178指示系统100的控制器(控制部件)370执行源、检测器和相机124、126、177的校准,以便获取源-检测器(sd)对校准数据、相机校准数据以及sd对124、126和相机177之间的刚性(联合)变换数据,所述预定状况例如描述系统100的状况的某个参数、前一次校准之后的某个经过时间或者超过预定限制的所执行的成像过程的数量。可替换地,当至少一个前述解释的状况超过预定极限值时,控制器370可以主动地(自动地)检测校准的需要,并且执行源、检测器和相机124、126、177的校准。
54.系统100通过例如对校准目标进行成像(扫描)以将目标映射到其3d空间(ct空间)来校准sd对124、126,并且同时,通过对目标进行成像以将校准目标映射到其本地3d空间(相机空间)中来校准目标共同可见的相机177。同时,在这个所谓的零点,控制器370通过像机177和位置信息产生部件183获取变换数据,该变换数据基于在源、检测器和相机124、126、177之间建立的几何结构。
55.在步骤206,操作者通过ui 178指示控制器370同步图像数据的获取,即患者的成像,其通过源和检测器124、126执行;相机数据的记录和位置数据的获取,这是通过位置信息产生部件183来执行的。作为该步骤206的结果,同步地执行图像和位置数据的获取以及相机数据的记录。
56.步骤204和206不必每次都执行,但是这些步骤204、206可以自动执行或者,当与已知校准解决方案比较时,操作员初始执行相当少。
57.在步骤208,操作者指示患者,即对象,将患者定位或安置在源和检测器124、126之间,使得可以对患者成像。患者可以通过患者支撑件142、143定位,使得下部架142支撑患者的下颚的末端,太阳穴支撑件143支撑患者的前额或太阳穴,或者患者支撑件142、143的所有部分支撑患者。或者,患者可以自由定位,而无需在源和检测器124、126之间的患者支撑件142、143的帮助。
58.在步骤210,操作者通过ui 178指示控制器370,以控制系统100通过移动器(运动部分)375,执行必要的成像移动,并且在这些移动期间,源124发射x射线辐射,而检测器126接收发射的辐射,以从定位的患者获取图像数据。
59.在步骤212,同时,即在图像数据的获取期间,并且与图像数据的获取同步,相机177对源124、定位的患者或两者进行成像以便获取相机数据,并且位置信息产生部件183确定位置数据,使得它在相机数据的获取期间跟踪相机177相对于成像对象(例如定位的患者)的位置。
60.在步骤213,如果还没有完成所有的成像和记录,则该方法返回到步骤210。否则,当已经获取了所有必要的数据时,方法201继续到下一步骤214。
61.在步骤214,在完成了必要的图像数据的获取之后,操作者指示患者离开成像位置。
62.在步骤216,控制器370通过计算在每个时刻处相机177相对于在零点校准期间相机177的位置的相机177的位置数据,从记录的相机数据计算sd对124、126的位置数据,这是通过借助于相机177的校准数据,并通过使用在每个时刻处计算的相机177的位置数据和变换数据来计算在每个时刻处sd对124、126的位置数据。
63.在步骤218,当将获取的图像数据从成像的患者重建到3d体积时,控制器370使用在每个时刻处sd对124、126的计算的位置数据。
64.图3示出了能够获取x射线图像数据和相机数据的系统100,所述x射线图像数据和相机数据用于3d体积的重建。
65.系统100包括控制器370,其控制例如其部分120、124、126、128、141、150、151、177、178、183、374、375、379的操作和移动,使得系统100如在之前的附图的上下文中解释的那样操作。
66.控制器370包括处理器(处理器部分)372,其执行操作者(用户)启动的和/或计算机程序(软件)启动的指令,并且处理数据以便运行应用。处理器372可以包括至少一个处理器,例如一个、两个、三个或更多个处理器。
67.在处理器372包括若干处理器的情况下,处理器372可以仅位于系统100中或至少一个单独的设备中,或者使得处理器372的一部分位于系统100中而处理器372的另一部分位于至少一个单独的设备中,这能够执行从成像对象的3d体积的重建和2d图像的形成。
68.控制器370还包括存储和维护数据的存储器(存储器部分)380。数据可以是指令、计算机程序和数据文件。存储器380包括至少一个存储器,例如一个、两个、三个或更多个存储器。
69.系统100还包括数据传送器(数据传送部分)374,控制器370使用传送器将控制命令、数据请求和数据发送到系统100中的部分124、126、128、141、177、178、183、375、379中的至少一个,例如源124、检测器126、移动器375、相机177或位置信息产生部件183。数据传送器374还在控制器370的控制下从部分124、126、128、141、177、178、183、375、379中的至少一个,例如源124、检测器126、移动器375、相机177或位置信息产生部件183,接收控制命令、数据请求和数据。通过一个或多个有线和/或无线连接提供系统100中数据传送器374与部分124、126、128、141、177、178、183、375、379之间的通信。
70.移动器375包括电机、驱动器或其他部分,控制器370使用这些部分来引起部分120、124、126、128、141、150、151中的至少一个的移动。
71.系统100还包括相机177和位置信息产生部件183,控制器370使用相机177来获得相机数据,控制器使用位置信息产生部件来获得位置数据,如在之前的图的上下文中解释的。
72.系统100还包括ui 178,其使得操作者能够输入控制命令、接收信息和/或指令、以及显示信息。ui 178可以包括触摸屏、至少一个功能键、以及有线或无线遥控器中的至少一个。ui 178可以被附接到柱140或托架145,如图1a和1b中所呈现的。
73.系统100还包括电源(电源部分)379,其能够为系统100供电。电源379包括用于为系统100供电的至少一个部件,例如,到电插头、电池或调节器的连接。
74.存储器380至少存储用于操作(控制)数据传送部分374的数据传送应用384、用于操作ui 178的用户接口(ui)应用388、以及用于操作电源379的电源应用381。
75.存储器380还存储计算机程序(计算机软件、计算机应用)389,其在例如计算机中,在系统100中,通过控制器370,运行时使用部分124、126、128、141、151、177、183、375中的至少一个以便控制如本说明书和附图中前述解释的系统100的操作。
76.计算机程序389,即其计算机程序代码,可以存储在有形的、非易失性(非暂时性)
计算机可读介质中,例如光盘(cd)或通用串行总线(usb)存储设备。
77.现在已经参照前面的示例性实施例解释了本发明及其若干优点。显然,本发明不仅限于这些实施例,而是包括在所附权利要求的范围内的所有可能的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1