一种可结合步行康复机器人一体化的脊柱拉带矫正架的制作方法
1.本实用新型涉及医用矫正仪器领域,特别涉及一种可结合步行康复机器人一体化的脊柱拉带矫正架。
背景技术:
2.青少年特发性脊柱侧凸(adolescent idiopathic scoliosis,ais)是指在青少年期出现的原因不明的脊柱侧凸,主要指10
‑
18岁之间的患者,是10岁以上儿童发育成熟前常见的一种非先天性三维脊柱畸形。脊柱侧凸又称为脊柱侧弯,是指脊柱的一个或数个椎体节段在冠状面上偏离身体中线向侧方弯曲,通常还伴有脊柱椎体的旋转和矢状面上后凸或前凸的增加或减少,是3个维度上的畸形。国际脊柱侧凸研究学会(scoliosis research society,srs)对其定义:应用cobb
′
s法测量站立位脊柱正位x线片的脊柱侧凸,角度>10
°
者称为脊柱侧凸。ais主要指10岁(包括10岁)以上儿童原因不明的脊柱侧凸,占学生总数的 0.5%
‑
3%,其发病原因复杂,仍在研究中。
3.国内外治疗情况主要包括以下几个方面:
4.(1)矫形器治疗
5.矫形器,亦常被称为支具,用于ais治疗起源于20世纪30
‑
40年代。 20世纪80年代支具治疗曾一度被部分学者否定,直到20世纪90年代初,再次被人们所重视。矫形器治疗的目的主要是在脊柱侧凸曲线进展危险期间内防止曲度的进一步加重直至患者骨骼成人化,以期最大减少手术治疗的可能性,减轻创伤。有学者比较支具治疗ais,肯定了脊柱矫形支具用于ais治疗,对于早期的脊柱侧凸延缓进展具有较好的控制作用,特别是轻型(cobb
′
s角15
°‑
30
°
)侧凸,可以避免手术治疗或为手术治疗提供较好的基础条件。矫形器目前常用的类型包括:t6以上的高位侧凸主要使用密尔沃基矫形器;t10以下及腰椎侧凸及旋转的主要使用波士顿式矫形器;t6以下的胸部中下段的侧凸及旋转主要使用色努式矫形器。 s.negrini等经过回顾性研究发现色努矫形器可以降低ais患者的手术率,从28.1%降至3.8%
‑
7.3%。同时该研究对支具治疗青少年脊柱侧凸患者进行综述,发现支具治疗能明显控制脊柱侧凸进展程度,但在提高生活质量方面没有明显差异。支具虽然可以有效地防止脊柱侧弯的情况恶化,但前提是它每天穿至少16小时。长时间佩戴某些类型的支架会固定脊柱和肌肉,加速椎间盘退化的过程,并导致肌肉萎缩和虚弱,因过度依赖支具,终止支具治疗后有可能造成脊柱侧弯进一步恶化。穿戴支具治疗可能造成的问题:为了矫正主要侧弯度数、而牺牲了另一个次要度数;穿上支具之后,会使人体的中心点远离重力中心线,躯干依旧(或更加)歪斜,没被支具包裹住的部位可能会更加歪斜,容易使肩胛骨维持在不好的位置;无法改变大脑对正确姿势的认知。同时包括青少年的情绪低落和生活质量下降、压力增加、自尊心下降、家庭冲突和身体活动限制、脊柱灵活性下降(从而可能进行手术矫正)、社交焦虑和孤立、负面的身体形象和心理困扰以及疼痛和压力疮。一些青少年发现这种经历在心理上具有极大的伤害性,以至于他们停止佩戴支具。
6.(2)手术治疗
7.手术治疗的目的在于通过手术保持躯干平衡稳定、改善畸形脊柱外观、阻止侧弯曲度进一步发展,从而最大限度地达到永久性三维畸形脊柱矫正,使得ais短期及长期并发症发生率维持在最低水平,纠正侧凸患者生理、心理情绪,日常生活等身心各方面问题。一般而言,对于ais胸椎侧凸度数>40
°
,腰弯>35
°
,或1年内侧凸度数增长过>5
°
者,通常需要脊柱手术矫形治疗。但也要考虑结合患者骨骼发育成熟度、生长发育状态、畸形特点、弯曲类型、对心肺功能的影响等一系列因素。1962年 harrington报道了首套有效治疗脊柱侧凸的内固定系统,成为治疗ais 的标准模式。其后都是基于此发展而来,目前流行的是双棒、多钩/多钉内固定系统,一系列研究显示,在胸椎畸形矫正中应用全钉系统,手术时间和失血量的减少、效果的维持、肺功能的改善等方面有较好的效果。ais 前路矫形融合术治疗主要适应证为胸腰段及腰段为主弯曲者。前路手术的融合节段较少、畸形矫正效果尤其是对椎体旋转的矫正良好,相较于后路手术,对于同样类型的脊柱侧凸,前路手术可取得相似甚至更好的矫正效果,并且需要融合的脊柱节段相对较少。国内学者对重度僵硬性ais使用前后路ⅰ期手术治疗,术中严格操作,可减少手术相关并发症,缩短住院时间及减少医疗费用。张鹏等研究经前路短节段固定矫形治疗ais,发现在腰段可取得良好的矫形效果,可有效减少围术期和远期并发症的发生。有研究发现对lenke5c型青少年脊柱侧凸使用选择性后路胸腰椎融合术,通过控制在矢状面的旋转而达到修正胸腰弯曲的目的,结果显示有较好效果。早期进行脊柱手术治疗,可能会面对失血过多,椎弓根器械切割脊椎,脊椎生长受限等情况。大多数涉及用从髂骨部位取骨片替换椎间盘,并使用棒、钩和螺丝的组合来保持脊柱回位,同时将脊柱进行融合固定。这可能导致脊柱灵活性和运动范围的永久性降低。有时,如果脊柱不能正确融合,则需要进行额外的再手术,多次手术风险较大,并发症较多。脊柱侧弯手术最常见的副作用是伤口感染。神经损伤很少见,但很严重。总体来看,脊柱侧弯手术的死亡率很低。
8.(3)运动治疗与手法治疗
9.运动疗法的理论基础建立于神经系统对肌肉调控功能异常学说和生物力学异常模式学说。可进行功能训练的依据是大脑的可塑性理论。康复训练是通过对肌肉系统训练来反馈给大脑,改变大脑中枢指令、运动过程的输出模式,并与周围环境相结合,从而改变运动方式,最终达到矫正的目的。脊柱侧弯脊柱骨骼变形多是由于椎体的旋转和平移相互结合,以及相关肌肉的变化,运用运动手法治疗纠正肌肉骨骼异常的同时,建立相对中立的位置,将修正后的运动模式传入大脑,从而改变大脑对自我运动模式的重新认知,重塑大脑。近几年来,国内外学者越来越重视ais的运动治疗。在德国,sir(scoliosis inpatient rehabilitation)被用于脊柱侧凸的矫正治疗,sir采用的是独立锻炼程序(根据每位患者不同情况设计不同的运动练习方案),并有效结合物理因子方法来矫正异常运动模式,根据lehnert
‑
schroth原则进行3个阶段的练习,有效地验证了sir治疗可降低脊柱侧凸患儿曲度的增长率。c.l.marti等对263例ais患者进行了运动治疗有效性的问卷调查,有22%的患者表示运动治疗在促进骨骼肌力方面有较好疗效。国内主要以医疗体操矫正和中医正骨调整为主。王书勤等利用“卧位牵顿”手法治疗ais,对100例患者(cobb
′
s角10
ꢀ°‑
40
°
)按就诊顺序随机分为两组,治疗组采用“卧位牵顿”手法并配合传统的中医推拿松解手法治疗,对照组采用脊柱的四维度牵引治疗,其结果表明两组均有效,但治疗组疗效明显优于对照组,证明“卧位牵顿”手法能有效地改善脊柱侧凸,是一种见效快、疗程短、安全性高的技术,但
长期的疗效还有待于跟踪随访。张建华等对40例ais患者使用倒悬牵引配合整脊手法,结果显示该方法在纠正脊柱侧凸畸形、改善整体外观、控制曲度发展、增强脊柱稳定性及恢复或维持功能方面有较好疗效。部分学者开始重视核心肌力的重要性,王华君等对22例患者实行对照研究,主要采用核心肌力训练法,结果表明核心肌力训练可以充分调动核心肌群,恢复核心肌群肌力,进而修正腰椎旋转侧凸情况。杨宁等通过运动干预观察青少年脊柱侧凸cobb
′
s角度变化,主要采用增强凸侧肌力练习,拉伸凹侧肌肉,并配合增加协调性训练和提高本体感觉训练,通过两个半月训练,约50次(1.0
‑
1.5h/次)训练,患者cobb
′
s角得到明显改善,专科医师建议cobb
′
s≤20
°
时可不带支具,说明了运动干预对青少年脊柱侧凸cobb
′
s角恢复效果显著。以上均表明运动治疗在ais的重要性越来越明显,有效性也得到更多的证实,但仍不够明显。
10.(4)其他治疗
11.大部分欧洲临床医师对侧弯角度较小和进展风险不大的患者常采用物理因子治疗,用来增加患者躯干协调性和本体感觉。近几年美国逐渐兴起的halo牵引治疗重度脊柱侧弯,尤其是用于术前牵引对于减少术后并发症有较好疗效。这种牵引法通过在颅骨上固定一个牵引环,患者可在轮椅上、步行过程中完成抗重力牵引,无需长期卧床,不受时间限制。这种方法越来越受到人们的关注,在结合手术矫正和单独应用方面,证明了其有效性。d.k.park等对30例脊柱侧凸患者进行了术前的halo牵引治疗对照研究,结果证明术前进行halo牵引的患者,对于术后的修正具有更好的效果。同时有研究发现对青少年脊柱侧凸患者进行心理干预可以明显缩短康复期。
12.综上所述,有关ais的矫正治疗还在不断地研究中,在保守治疗方面合适的运动治疗是预防青少年脊柱侧凸加重的一治疗方式。因此,对ais 治疗的研究,需要更多的创新、有效、风险低的技术融入保守运动康复治疗中,避免支具治疗或缩短支具穿戴时间,能有效的防止侧弯弧度恶化,降低手术的概率,恢复矢状面、冠状面以及水平面的生理曲度。实际使用时,除脊柱畸形外,脊柱侧弯可引起如本体感受器功能障碍、运动平衡功能异常等表现。相关研究表明,ais患者在行走过程中其躯干在横截面内旋转运动具有明显不对称性。在正常步行中,恰当的脊柱和下肢肌肉激活模式可以控制身体节段的活动和躯干的平衡。有研究认为ais患者会改变脊柱的连接结构,从而引起活动性和平衡的改变。由于脊柱参与维持平衡的过程,脊柱出现畸形则可能引起重心活动的改变从而产生病理步态,相比正常人,ais患者的步态表现出步长缩短,步幅减慢,髋关节和骨盆的活动度减小,能量消耗增加,前进模式和地面反作用力不对称等情况。一种可结合步行康复机器人一体化的脊柱拉带矫正架还可以通过被动矫形和主动改善本体感觉、平衡功能以及律动能力来提高ais患者动态姿势的控制,从而改善其病理步态,从而纠正脊柱侧弯,恢复矢状面、冠状面以及水平面的生理曲度。
技术实现要素:
13.鉴于上述问题,本实用新型的目的在于提供一种对青少年脊柱侧凸矫正效果好,阻止侧弯角度增大、改善肺活量和降低疼痛,及同时可以预防可能出现的肌肉骨骼失衡和心肺功能障碍的可结合步行康复机器人一体化的脊柱拉带矫正架。
14.为实现上述目的,本实用新型提供的一种可结合步行康复机器人一体化的脊柱拉
带矫正架,其中,包括步行康复机器人本体、在步行康复机器人本体上设有的框架体、在框架体一侧上设有的第一绑带结构和第二绑带结构,及在框架体另一侧上设有的第三绑带结构。第一绑带结构、第二绑带结构和第三绑带结构依次由上至下套于患者的身体上。框架体包括在步行康复机器人本体两侧分别设有相互平行的第一固定块和第二固定块、在第一固定块与第二固定块端部上设有连接两者的第一横杆、在第一固定块与第一横杆交汇连接的位置上设有的第一支撑杆、在第二固定块与第一横杆交汇连接的位置上设有与第一支撑杆平行的第二支撑杆、在第一固定块的端部上设有与第二支撑杆平行的第三支撑杆、在第二固定块的端部上设有与第三支撑杆平行的第四支撑杆、在第一支撑杆的顶端与第三支撑杆的顶端之间设有连接两者的第一平行杆、在第三支撑杆的顶端与第四支撑杆的顶端之间设有连接两者的第二平行杆,及在相互平行的第一平行杆和第二平行杆之间的前端上设有的第三平行杆和末端上设有的第四平行杆。第一绑带结构和第二绑带结构均包括在第一支撑杆上设有的第一单向带夹、套在患者身体的第一拉带,及在第一拉带上设有穿过第一单向带夹固定的第一系带。第三绑带结构包括在第二支撑杆上设有的第二单向带夹、套在患者身体的第二拉带,及在第二拉带上设有穿过第二单向带夹固定的第二系带。第一单向带夹和第二单向带夹均包括在第一支撑杆或者第二支撑杆上设有的第一转轴、在第一转轴上设有以第一转轴为基点的第一滴水型转轮、在第一滴水型转轮一侧的第一支撑杆或者第二支撑杆上设有的第二转轴、在第二转轴上设有与第一滴水型转轮对称且相互接触以第二转轴为基点的第二滴水型转轮,及在第一滴水型转轮与第二滴水型转轮相互接触的两者表面上分别设有的第一单向卡齿。
15.在一些实施方式中,框架体一侧上设置有的第四绑带结构,另一侧上设置有的第五绑带结构和第六绑带结构。第四绑带结构均包括在第三支撑杆上设有的第三单向带夹、套在患者身体的第三拉带,及在第三拉带上设有穿过第三单向带夹固定的第三系带。第五绑带结构和第六绑带结构均包括在第四支撑杆上设有的第四单向带夹、套在患者身体的第四拉带,及在第四拉带上设有穿过第四单向带夹固定的第四系带。第三单向带夹和第四单向带夹均包括在第三支撑杆或者第四支撑杆上设有的第三转轴、在第三转轴上设有以第三转轴为基点的第三滴水型转轮、在第三滴水型转轮一侧的第一支撑杆或者第二支撑杆上设有的第四转轴、在第四转轴上设有与第三滴水型转轮对称且相互接触以第四转轴为基点的第四滴水型转轮,及在第三滴水型转轮与第四滴水型转轮相互接触的两者表面上分别设有的第二单向卡齿。
16.在一些实施方式中,第三平行杆与第四平行杆之间设置有的挂杆。挂杆上设置有挂住患者下颌和枕部的第七绑带结构。第七绑带结构包括包住患者下颌和枕部的第五拉带,及在第五拉带两端上分别设有挂于挂杆的第五系带。
17.在一些实施方式中,第三支撑杆或者第四支撑杆上设置有扶手。
18.在一些实施方式中,步行康复机器人本体包括在患者两者分别设有的车轮、在两侧的车轮上设有的车架,及在车轮上方的车架上设有的托手架。两侧所述的托手架分别与第一固定块和第二固定块连接。上述步行康复机器人本体可以采用健身车或者其他滑行车代替。
19.本实用新型的有益效果是结合步行康复机器人形成一体化的脊柱拉带矫正架,根据力学模式通过绑带结构牵引纠正脊柱侧弯的被动运动和双下肢的主动运动(步行康复机
器人设定的标准化的主动步态模式)进行整合的全脊柱康复运动治疗,具有对青少年脊柱侧凸矫正效果好,阻止侧弯角度增大、改善肺活量和降低疼痛,及同时可以预防可能出现的肌肉骨骼失衡和心肺功能障碍的效果。由于第一绑带结构、第二绑带结构和第三绑带结构根据力学模式,作为医疗辅助设备,为了更好的对医疗设备进行设计,改善人机环境,满足使用者需求,提高医生的工作效率。应用时,脊柱弯曲异常是脊柱弯曲超出了正常生理弯曲导致的异常体征。正常条件下,人在直立时,脊柱受身体的重力作用和肌肉、韧带的牵拉,会逐渐形成矢状面的颈、胸、腰、骶4个生理性弯曲,表现出(向前凸的)颈曲、 (向后凸的)胸曲、(向前凸的)腰曲、(向后凸的)骶曲,冠状面上不会出现任何弧度,到青春期结束时才最终定型。实现了对青少年脊柱侧凸矫正效果好,阻止侧弯角度增大、改善肺活量和降低疼痛,及同时可以预防可能出现的肌肉骨骼失衡和心肺功能障碍的效果。
附图说明
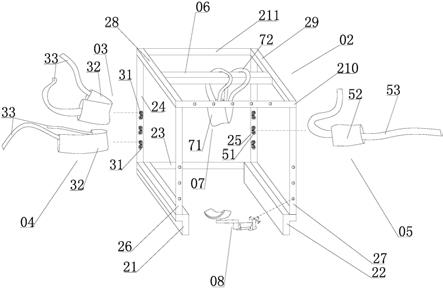
20.图1为本实用新型使用状态的结构示意图;
21.图2为图1所示框架体的结构示意图;
22.图3为图2所示框架体使用状态的结构示意图;
23.图4为图2所示第一单向带夹或者第二单向带夹的结构示意图。
具体实施方式
24.下面结合附图对实用新型作进一步详细的说明。
25.实施例1
26.一种可结合步行康复机器人一体化的脊柱拉带矫正架,包括步行康复机器人本体01、在步行康复机器人本体01上设有的框架体02、在框架体 02一侧上设有的第一绑带结构03和第二绑带结构04,及在框架体02另一侧上设有的第三绑带结构05。第一绑带结构03、第二绑带结构04和第三绑带结构05依次由上至下套于患者的身体上。框架体02包括在步行康复机器人本体01两侧分别设有相互平行的第一固定块21和第二固定块 22、在第一固定块21与第二固定块22端部上设有连接两者的第一横杆23、在第一固定块21与第一横杆23交汇连接的位置上设有的第一支撑杆24、在第二固定块22与第一横杆23交汇连接的位置上设有与第一支撑杆24 平行的第二支撑杆25、在第一固定块21的端部上设有与第二支撑杆25平行的第三支撑杆26、在第二固定块22的端部上设有与第三支撑杆26平行的第四支撑杆27、在第一支撑杆24的顶端与第三支撑杆26的顶端之间设有连接两者的第一平行杆28、在第三支撑杆26的顶端与第四支撑杆27的顶端之间设有连接两者的第二平行杆29,及在相互平行的第一平行杆28 和第二平行杆29之间的前端上设有的第三平行杆210和末端上设有的第四平行杆211。第一绑带结构03和第二绑带结构04均包括在第一支撑杆 24上设有的第一单向带夹31、套在患者身体的第一拉带32,及在第一拉带32上设有穿过第一单向带夹31固定的第一系带33。第三绑带结构05 包括在第二支撑杆25上设有的第二单向带夹51、套在患者身体的第二拉带52,及在第二拉带52上设有穿过第二单向带夹51固定的第二系带53。第一单向带夹31和第二单向带夹51均包括在第一支撑杆24或者第二支撑杆25上设有的第一转轴54、在第一转轴54上设有以第一转轴54为基点的第一滴水型转轮55、在第一滴水型转轮55一侧的第一支撑杆24或者第二支撑杆25上设有的第二转轴56、在第二转轴56上设有与第
一滴水型转轮55对称且相互接触以第二转轴56为基点的第二滴水型转轮57,及在第一滴水型转轮55与第二滴水型转轮57相互接触的两者表面上分别设有的第一单向卡齿58。第三平行杆210与第四平行杆211之间设置有的挂杆 06。挂杆06上设置有挂住患者下颌和枕部的第七绑带结构07。第七绑带结构07包括包住患者下颌和枕部的第五拉带71,及在第五拉带71两端上分别设有挂于挂杆06的第五系带72。第三支撑杆26或者第四支撑杆27 上设置有扶手08。步行康复机器人本体01包括在患者两者分别设有的车轮11、在两侧的车轮11上设有的车架12,及在车轮11上方的车架12上设有的托手架13。两侧所述的托手架13分别与第一固定块21和第二固定块22连接。
27.上述第一拉带32和第二拉带52位置于背部位置采用透明的硅胶套紧贴脊柱区域,目的可以通过无线超声探头平扫动态侦测需要纠正的侧弯脊柱保持处于脊柱中心线,达到通过调节绑带的拉力的作用。
28.实施例2
29.在不改变实施例1的条件下进行变形设计。
30.框架体02一侧上设置有的第四绑带结构,另一侧上设置有的第五绑带结构和第六绑带结构。第四绑带结构均包括在第三支撑杆26上设有的第三单向带夹、套在患者身体的第三拉带,及在第三拉带上设有穿过第三单向带夹固定的第三系带。第五绑带结构和第六绑带结构均包括在第四支撑杆27上设有的第四单向带夹、套在患者身体的第四拉带,及在第四拉带上设有穿过第四单向带夹固定的第四系带。第三单向带夹和第四单向带夹均包括在第三支撑杆26或者第四支撑杆27上设有的第三转轴、在第三转轴上设有以第三转轴为基点的第三滴水型转轮、在第三滴水型转轮一侧的第一支撑杆24或者第二支撑杆25上设有的第四转轴、在第四转轴上设有与第三滴水型转轮对称且相互接触以第四转轴为基点的第四滴水型转轮,及在第三滴水型转轮与第四滴水型转轮相互接触的两者表面上分别设有的第二单向卡齿。
31.应用时,第一绑带结构03、第二绑带结构04和第三绑带结构05根据力学模式,作为医疗辅助设备,为了更好的对医疗设备进行设计,改善人机环境,满足使用者需求,提高医生的工作效率。动静结合一体化步行康复机器人的脊柱拉带矫正架使用拉带作矫正的三点原则,形成一体化的结合步行康复机器人动态的步态训练,让患者保持正确的体位,辅助稳定病变关节,减少椎体承重,通过双下肢大幅度步态的动态牵伸,延展脊柱的筋膜张力,平衡协调及激活躯干前后的深层肌群,预防和矫正椎体畸形,在提高患者的躯体功能方面起到积极的作用。通过主动干预性康复治疗,减少穿戴支具的时间甚至避免穿戴支具和手术有创治疗。
32.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1