一种骨科手术机器人的制作方法
1.本实用新型涉及骨科手术机器人技术应用领域,特别涉及一种骨科手术机器人。
背景技术:
2.依据临床统计数据显示,颈胸腰椎退行性疾病、脊柱或四肢骨折等类疾病已成为骨科最主要的病种。传统骨科开放式手术具有难度大风险高,患者创伤大、恢复慢、术后并发症发生率高及医疗费用高等缺陷,所以采用微创手术治疗的方式是骨科未来发展的必然。目前手术室在进行骨科微创手术时都是凭借医生丰富的经验和多次术中x光机扫描反复确认来实现,这样不仅对医生的自身技术提出较高要求,同时多次x光机扫描也会给医生和患者带来累计的辐射伤害,这些都是目前骨科手术治疗中亟待解决的问题。
3.随着计算机、自动化等高新技术的快速发展,机器人在精确性、可靠性、智能性、操作性等方面都有了长足提高,采用骨科手术机器人去解决上述临床手术中的难点已经成为可能。现有技术中骨科手术机器人包括机械臂装置和显示器装置,这两个装置为两个独立结构,在使用时需要分别将这两结构进行固定,因为手术室的空间较小,当分开单独放置机械臂装置和显示器装置后,留给手术床及其他手术器械的空间就相对更少了。
4.因此,针对现有技术的不足,提供一种骨科手术机器人以解决现有技术不足甚为必要。
技术实现要素:
5.本实用新型的目的在于避免现有技术的不足之处而提供一种骨科手术机器人。该骨科手术机器人将机械臂和显示装置整合在一起,具有占用空间小的优点。
6.本实用新型的上述目的通过以下技术措施实现:
7.提供一种骨科手术机器人,设置有架体、机械臂和显示装置,机械臂和显示装置分别固定装配于架体的上方。
8.所述机械臂设置有多个旋转机构,多个旋转机构依次装配,将与架体装配的旋转机构定义为第一旋转机构,与第一旋转机构装配的旋转机构定义为第二旋转机构。
9.将所述机械臂和所述显示装置之间距离定义为a,将第一旋转机构与第二旋转机构之间的整体长度定义为b,存在a>b>0。
10.优选的,上述架体设置有装配板,机械臂和显示装置分别装配于装配板。
11.优选的,上述装配板设置有第一装配孔和第二装配孔,第一装配孔与显示装置固定装配,第二装配孔与第一旋转机构固定装配。
12.优选的,上述显示装置设置有显示器和立柱,立柱的一端固定装配于第一装配孔,立柱的另一端与显示器固定装配。
13.优选的,上述架体还设置有支撑框架、多条支撑横梁和底板,装配板固定装配于支撑框架上方,支撑框架固定安装于底板的上方,多条支撑横梁分别固定于支撑框架,且多条支撑横梁平行设置。
14.优选的,上述支撑框架与所述支撑横梁为整体的重心投影位于底板内部。
15.优选的,上述第一旋转机构位于支撑横梁的正上方。
16.优选的,上述支撑框架设置有第一板体、第二板体、第三板体和第四板体,第一板体、第二板体、第三板体和第四板体依次围成所述框状结构,支撑横梁固定装配于第一板体,且支撑横梁远离底板。
17.优选的,上述框状结构的内部存在收纳空间。
18.优选的,上述立柱位于第一板体的正上方。
19.优选的,上述旋转机构设置有6个。
20.优选的,上述第二板体和所述第四板体均设置有辅助横梁和竖板体,辅助横梁一体连接于竖板体末端,所述辅助横梁远离底板,辅助横梁与支撑横梁平行设置,竖板体与第一板体和第三板体固定装配。
21.优选的,上述辅助横梁的下方为收纳空间。
22.本实用新型的一种骨科手术机器人,设置有架体、机械臂和显示装置,机械臂和显示装置分别固定装配于架体的上方;所述机械臂设置有多个旋转机构,多个旋转机构依次装配,将与架体装配的旋转机构定义为第一旋转机构,与第一旋转机构装配的旋转机构定义为第二旋转机构;所述机械臂和所述显示装置之间距离大于第一旋转机构与第二旋转机构之间的整体长度。该骨科手术机器人将机械臂和显示装置集合在同一个架体上方,从而能减少各自的占用空间,同时第一旋转机构在转动时第二旋转机构并不会干涉到显示装置。
附图说明
23.利用附图对本实用新型作进一步的说明,但附图中的内容不构成对本实用新型的任何限制。
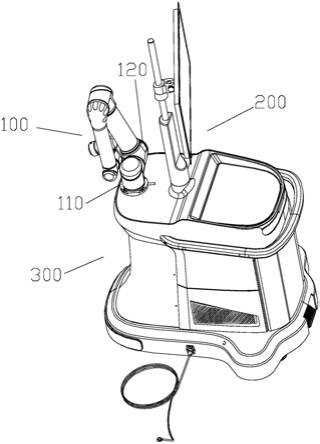
24.图1为一种骨科手术机器人的结构示意图。
25.图2为图1的另一角度示意图。
26.图3为一种骨科手术机器人另一状态时的结构示意图。
27.图4为图1的部分结构示意图。
28.图5为装配板的结构示意图。
29.图6为支撑框架、支撑横梁和底板的结构示意图。
30.图7为图6的另一角度示意图。
31.在图1到图7中,包括有:
32.机械臂100、第一旋转机构110、第二旋转机构120、
33.显示装置200、显示器210、立柱220、
34.架体300、
35.支撑框架310、第一板体311、第二板体312、第三板体313、第四板体314、辅助横梁315、竖板体316、
36.支撑横梁320、
37.底板330、
38.装配板340、第一装配孔341、第二装配孔342。
具体实施方式
39.结合以下实施例对本实用新型的技术方案作进一步说明。
40.实施例1。
41.一种骨科手术机器人,如图1至5所示,设置有架体300、机械臂100和显示装置200,机械臂100和显示装置200分别固定装配于架体300的上方。
42.机械臂100设置有多个旋转机构,多个旋转机构依次装配,将与架体300装配的旋转机构定义为第一旋转机构110,与第一旋转机构110装配的旋转机构定义为第二旋转机构120。机械臂100和所述显示装置200之间距离大于第一旋转机构110与第二旋转机构120之间的整体长度。本实施例的旋转机构设置有6个。
43.需要说明的是,机械臂100和所述显示装置200之间距离大于第一旋转机构110与第二旋转机构120之间的整体长度,在机械臂100收纳时能将第二旋转机构120旋转至机械臂100和显示装置200之间,而在机械臂100工作时,即使第一旋转机构110进行大角度旋转时,显示装置200不会对第二旋转机构120产生干涉。
44.架体300设置有装配板340,机械臂100和显示装置200分别装配于装配板340。装配板340设置有第一装配孔341和第二装配孔342,第一装配孔341与显示装置200固定装配,第二装配孔342与第一旋转机构110固定装配。
45.显示装置200设置有显示器210和立柱220,立柱220的一端固定装配于第一装配孔341,立柱220的另一端与显示器210固定装配。
46.该骨科手术机器人将机械臂100和显示装置200集合于同一个架体300上方,从而能减少占用空间,第一旋转机构110在转动时第二旋转机构120并不会干涉到显示装置200。
47.实施例2。
48.一种骨科手术机器人,如图6和图7,其他特征与实施例1相同,还具有如下特征:架体300还设置有支撑框架310、多条支撑横梁320和底板330,装配板340固定装配于支撑框架310上方,支撑框架310固定安装于底板330的上方,多条支撑横梁320分别固定于支撑框架310,且多条支撑横梁320平行设置。
49.所述支撑框架310与所述支撑横梁320为整体的重心投影位于底板330内部。
50.第一旋转机构110位于支撑横梁320的正上方。
51.支撑框架310设置有第一板体311、第二板体312、第三板体313和第四板体314,第一板体311、第二板体312、第三板体313和第四板体314依次围成所述框状结构,支撑横梁320固定装配于第一板体311,且支撑横梁320远离底板330。立柱220位于第一板体311的正上方。
52.框状结构的内部存在收纳空间,收纳空间用于收纳骨科手术机器人的控制装置、电源等物品。
53.其中,支撑框架310位于底板330的后半部,支撑横梁320的投影位于底板330的前半部。
54.需要说明的是,本实用新型的支撑框架310和支撑横梁320分布于底板330的前后两部分,即使支撑横梁320上方的骨科手术机器人机械臂100工作伸展时,整体重心的投影始终位于底板330的范围内,大大提高骨科手术机器人的整体稳定性。
55.第二板体312和所述第四板体314均设置有辅助横梁315和竖板体316,辅助横梁
315一体连接于竖板体316末端,所述辅助横梁315远离底板330,辅助横梁315与支撑横梁320平行设置,竖板体316与第一板体311和第三板体313固定装配。需要说明的是,辅助横梁315与支撑横梁320为整体支撑骨科手术机器人机械臂100,从而更好地提高稳定性。
56.辅助横梁315的下方为收纳空间。
57.与实施例1相比,本实施例的骨科手术机器人能大大提高机器人的内部结构稳定性,同时收纳空间还能用于收纳骨科手术机器人的控制装置、电源等物品,从而能大大节省空间。
58.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细说明,本领域的普通技术人员应当理解,可以对本实用新型技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1