一种手术用体位变换装置的制作方法
1.本发明涉及医疗器械领域,具体为一种手术用体位变换装置。
背景技术:
2.手术床又称为手术台,可以在手术过程中支撑患者,并根据手术操作需要调整体位,为医生提供方便的手术环境,手术床属于手术室的基础设备。
3.现有的手术床如申请号:202210010762的一种具有翻板移动单元的电动手术床,其两侧具有可翻转及平移的翻板移动单元,操作时翻板移动单元先立起后平移,可适应不同体型的患者并从两侧向人体平移限位患者。然而在患者侧卧位手术时,患者需要平躺注射麻药,之后由医护人员对其进行手动的体位变换,此举费时费力,且手术床受本身宽度的限制医护人员对患者的体位变换操作难度很高。尽管手术床本身具有一定的倾斜功能,但角度不大,一些体型较大的患者的体位变换仍然困难。
技术实现要素:
4.本发明所要解决的技术问题是提供一种施加在现有手术床两侧,能使患者翻转体位并移动至手术床中部的手术用体位变换装置。
5.为解决上述问题,本发明所采取的技术方案是:一种手术用体位变换装置,其包括:两翻转驱动模块,两所述翻转驱动模块左右镜像设置在手术床两侧,所述翻转驱动模块包括底座和前后镜像设置在所述底座上的两走行车机构,所述走行车机构包括支撑架、设置在所述支撑架上的弧形导轨、滑动设置在所述弧形导轨上的行星轨道和可沿所述行星轨道移动的走行车;翻转模块,所述翻转模块包括上传送带和设置在所述上传送带左右两侧的上传送带收放辊,所述上传送带缠绕在所述上传送带收放辊上,所述上传送带收放辊旋转设置在所述翻转驱动模块的两走行车上;平移模块,所述平移模块包括对称设置在所述手术床两侧的两下传送带收放机构和设置在两所述下传送带收放机构之间的下传送带,所述下传送带收放机构设置在所述翻转驱动模块的两支撑架上;所述下传送带的上端面与所述上传送带的下端面通过齿形结构啮合设置。
6.作为本发明的进一步改进,所述弧形导轨包括弧形的导轨本体、设置在所述导轨本体上部的行星轨道锁紧螺栓和设置所述导轨本体上部两侧的两走行车固定扣;所述导轨本体上沿其弧线方向开设有导轨槽,所述行星轨道滑动设置在所述导轨槽内;所述行星轨道锁紧螺栓用于所述行星轨道滑动到位后固定支撑所述行星轨道;两所述走行车固定扣用于固定所述走行车。
7.作为本发明的进一步改进,所述行星轨道包括弧状的轨道本体、设置在轨道本体
上端的走行车限位板和设置在所述轨道本体内侧的行星齿;所述轨道本体两侧对称开设有行星轨道槽,所述行星轨道槽使所述轨道本体外侧形成轨道滑动部,使所述轨道本体内侧形成走行车导向部,所述行星轨道通过所述轨道滑动部滑动设置在所述导轨槽内。
8.作为本发明的进一步改进,所述走行车包括对应所述走行车导向部开设的走行车槽孔、设置在所述走行车槽孔内的驱动齿轮、用于驱动所述驱动齿轮转动的走行电机和用于驱动所述上传送带收放辊转动的走行车收放电机;所述驱动齿轮与所述行星齿啮合设置。
9.作为本发明的进一步改进,所述走行车两侧对应所述走行车固定扣均设置有走行车定位孔;所述走行车固定扣与所述走行车定位孔扣合用于所述走行车驱动所述行星轨道滑出所述弧形导轨或复位至所述弧形导轨中;所述走行车固定扣与所述走行车定位孔开启用于所述走行车沿所述行星轨道移动。
10.作为本发明的进一步改进,所述支撑架包括设置在所述底座上的支撑基体、通过立柱设置在所述支撑基体上的支撑台、设置在所述支撑台上的走行车支架和设置在所述支撑基体上的导轨支架;所述走行车支架用于支撑限位所述走行车;所述导轨支架用于支撑所述弧形导轨。
11.作为本发明的进一步改进,所述上传送带的上端面上对称设置有两定位气囊组件,所述定位气囊组件包括沿左右方向延伸排布的若干限位气囊和设置在所述限位气囊外侧的支撑气囊;所述限位气囊充气后呈竖直板状,所述支撑气囊充气后其截面呈直角三角形状,其竖边与相邻的限位气囊相连接,其横边固设在所述上传送带上;相邻两所述定位气囊组件的限位气囊之间形成限位通道用于限位患者。
12.作为本发明的进一步改进,所述上传送带收放辊两端均与所述走行车可拆卸连接,所述上传送带上对应所述上传送带收放辊间隔设置有若干的束带过孔,所述束带过孔用于穿设束带以限位上传送带的收放。
13.作为本发明的进一步改进,所述下传送带收放机构包括对称设置在两所述支撑架上的两收放辊支撑座、旋转设置在两所述收放辊支撑座之间的下传送带收放辊和设置在所述收放辊支撑座之间的变向辊;所述下传送带经所述变向辊变向后缠绕在所述下传送带收放辊上,任一所述收放辊支撑座上对应所述下传送带收放辊设置有收放电机,所述收放电机用于控制所述下传送带收放辊旋转以控制所述下传送带左右移动。
14.作为本发明的进一步改进,所述上传送带的下端面上均匀设置有若干的棱条形成上传送带齿面,所述下传送带的上端面上对应所述上传送带齿面设置有若干的棱条形成下传送带齿形面,所述上传送带齿面与所述下传送带齿形面啮合用于所述下传送带位移时带动所述上传送带位移。
15.采用上述技术方案所产生的有益效果在于:
本发明通过翻转驱动模块的走行车驱动行星轨道滑出弧形导轨,当行星轨道到位固定后释放走行车,使走行车沿行星轨道向上或向下移动,从而带动上传送带收放辊弧线运动,进而通过一侧翻转起来的上传送带将平躺的患者翻转一定角度,实现患者在手术床上的体位变化。
16.本发明的上传送带和下传送带通过齿形结构啮合设置,当下传送带在下传送带收放机构的驱动下平移时,下传送带能通过与上传送带相啮合的部分带动上传送带位移,此时上传送带的一侧的上传送带收放辊对应下传送带的移动放出部分缠绕在上传送带收放辊上的上传送带,实现患者翻身后在手术床上的居中,避免了患者翻身后过于偏向手术床一侧而造成安全事故。
17.本发明的上传送带通过上传送带收放辊可拆卸设置在两走行车之间,拆下上传送带收放辊和走行车的连接处,并向上传送带和上传送带收放辊上穿设束带,使上传送带成为临时担架,可方便转移患者。
附图说明
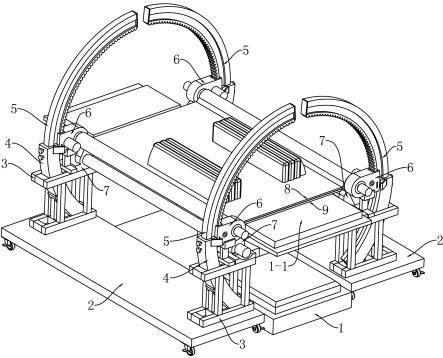
18.图1是本发明实施例的结构示意图。
19.图2是本发明实施例另一角度的结构示意图。
20.图3是本发明实施例的主视图。
21.图4是本发明实施例使用状态的结构示意图。
22.图5是本发明实施例的隐藏行星轨道的翻转驱动模块的结构示意图。
23.图6是图5 另一角度的结构示意图。
24.图7是本发明实施例的翻转模块的结构示意图。
25.图8是本发明实施例的平移模块的结构示意图。
26.图9是本发明实施例的上传送带齿面和下传送带齿形面的结构示意图。
27.其中:1 手术床;1-1 手术床面;2 底座;3 支撑架;3-1 走行车支架;3-2 导轨支架;3-3 支撑台;3-4 支撑基体;4 弧形导轨;4-1 行星轨道锁紧螺栓;4-2 走行车固定扣;4-3导轨槽;5 行星轨道;5-1 走行车限位板;5-2 行星轨道槽;5-3 行星齿;6 走行车;6-1 走行车收放电机;6-2 走行电机;6-3 上传送带收放辊;6-31收放辊转接管;6-4 走行车槽孔;6-5 驱动齿轮;6-6 走行车定位孔;7 下传送带收放机构;7-1 下传送带收放辊;7-2 收放电机;7-3 收放辊支撑座;7-4 变向辊;8 上传送带;8-1 上传送带齿面;8-2定位气囊组件;8-21 限位气囊;8-22 支撑气囊;8-3 束带过孔;8-4 束带9 下传送带;9-1 下传送带齿形面。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚,下面结合具体实施例对发明进行清楚、完整的描述。
29.如图1至图9所示,一种手术用体位变换装置,用于将麻醉后的患者的体位变换90度,即从平躺位变为侧卧位,其包括:如图1至图6所示的两翻转驱动模块,两所述翻转驱动模块左右镜像设置在手术床1两侧,所述翻转驱动模块包括底座2和前后镜像设置在所述底座2上的两走行车机构,所述走行车机构包括支撑架3、设置在所述支撑架3上的弧形导轨4、滑动设置在所述弧形导轨4上的行星轨道5和可沿所述行星轨道5移动的走行车6;如图7所示的翻转模块,所述翻转模块包括上传送带8和设置在所述上传送带8左右两侧的上传送带收放辊6-3,所述上传送带8缠绕在所述上传送带收放辊6-3上,所述上传送带收放辊6-3旋转设置在所述翻转驱动模块的两走行车6上;如图8所示的平移模块,所述平移模块包括对称设置在所述手术床1两侧的两下传送带收放机构7和设置在两所述下传送带收放机构7之间的下传送带9,所述下传送带收放机构7设置在所述翻转驱动模块的两支撑架3上;所述下传送带9的上端面与所述上传送带8的下端面通过齿形结构啮合设置。本实施例的图8中,下传送带9靠近一侧的下传送带收放机构7处截断示意。
30.如图5和图6所示,所述弧形导轨4包括弧形的导轨本体、设置在所述导轨本体上部的两个行星轨道锁紧螺栓4-1和设置所述导轨本体上部两侧的两走行车固定扣4-2。所述导轨本体上沿其弧线方向开设有凸字形的导轨槽4-3,所述行星轨道5滑动设置在所述导轨槽4-3内。本实施例中弧形导轨4的底部位于导轨槽4-3内设置有弹性垫片用于行星轨道5沿导轨槽4-3复位时起到缓冲的作用增加设备的使用寿命。所述行星轨道锁紧螺栓4-1用于所述行星轨道5滑动到位后固定支撑所述行星轨道5,本实施例中弧形导轨4的上部可对应行星轨道锁紧螺栓4-1设置有锁紧螺栓驱动电机(图中未画出),锁紧螺栓驱动电机与行星轨道锁紧螺栓4-1连接,使行星轨道锁紧螺栓4-1的旋转实现智能控制。本实施例中走行车固定扣4-2整体呈“丁”字形状,其一端呈勾状,一端呈平直状,其勾状一端用于和走行车定位孔6-6扣合用于固定所述走行车6,其平直部铰连在弧形导轨4的上部,优选的,弧形导轨4的上部设置有扣合驱动电机(图中未画出),走行车固定扣4-2平直部一端与扣合电机的输出轴连接,使得走行车固定扣4-2的扣合动作智能化。
31.如图1至图4所示,所述行星轨道5包括弧状的轨道本体、设置在轨道本体上端的走行车限位板5-1和设置在所述轨道本体内侧的行星齿5-3。所述轨道本体两侧对称开设有行星轨道槽5-2,所述行星轨道槽5-2使所述轨道本体外侧形成轨道滑动部(截面呈凸字状),使所述轨道本体内侧形成走行车导向部(截面呈凸字状),所述行星轨道5通过所述轨道滑动部滑动设置在所述导轨槽4-3内。本实施例中行星轨道5可收回弧形导轨4 内,方便装置整体的转移,同时当患者进行一侧的翻身时,一侧的行星轨道5伸出,另一侧的行星轨道5收在弧形导轨4内,医护人员可从行星轨道5收在弧形导轨4内一侧对患者进行操作。本实施例中,上传送带8将患者一侧翻转至大于50
°
时患者在自重或医护人员简单的扶正后即可实现使患者实现侧卧位。
32.如图5至图6所示,所述走行车6包括对应所述走行车导向部开设的走行车槽孔6-4(其截面呈凸字状)、设置在所述走行车槽孔6-4内的驱动齿轮6-5、用于驱动所述驱动齿轮6-5转动的走行电机6-2和用于驱动所述上传送带收放辊6-3转动的走行车收放电机6-1。走行电机6-2和走行车收放电机6-1均设置具有自锁功能,走行电机6-2和走行车收放电机6-1
在停止转动后受外力不易转动,以保证走行车6在行星轨道5上不会掉落,且上传送带收放辊6-3不会在进行翻转时自主转动。所述驱动齿轮6-5与所述行星齿5-3啮合设置。所述走行车6两侧对应所述走行车固定扣4-2均设置有走行车定位孔6-6。所述走行车固定扣4-2与所述走行车定位孔6-6扣合用于所述走行车6驱动所述行星轨道5滑出所述弧形导轨4或复位至所述弧形导轨4中,所述走行车固定扣4-2与所述走行车定位孔6-6开启用于所述走行车6沿所述行星轨道5移动。本实施例的走行车6既可充当行星轨道5伸出和复位的驱动,又能在行星轨道5固定后沿其移动,减少了设备整体的驱动装置的数量,进而减少了能源的损耗。
33.如图5至图6所示,所述支撑架3包括设置在所述底座2上的支撑基体3-4、通过立柱设置在所述支撑基体3-4上的支撑台3-3、设置在所述支撑台3-3上的走行车支架3-1和设置在所述支撑基体3-4上的导轨支架3-2。所述走行车支架3-1整体呈工字状,其上部开设有开口朝上的倒梯形槽用于引导并支撑走行车6。所述导轨支架3-2下部与支撑基体3-4连接,其上部设置有与弧形导轨4外弧侧壁相适配的支撑板用于支撑所述弧形导轨4。
34.如图7所示,所述上传送带8的上端面上对称设置有两定位气囊组件8-2,所述定位气囊组件8-2包括沿左右方向延伸排布的3个限位气囊8-21和设置在所述限位气囊8-21外侧的支撑气囊8-22。所述限位气囊8-21充气后呈竖直板状,所述支撑气囊8-22充气后其截面呈直角三角形状,其竖边与相邻的限位气囊8-21相连接,其横边固设在所述上传送带8上。相邻两所述定位气囊组件8-2的限位气囊8-21之间形成限位通道用于限位患者。本实施例中。参见图3和图4,当患者躺在两限位气囊8-21之间时,患者的胳膊位于两支撑气囊8-22外侧,在上传送带8一侧随两走行车6翻起时,患者被限位在两限位气囊8-21之间,既避免了患者从手术床上掉落,又提高了患者的翻身效果。详见图4,当左侧的上传送带8翻起时,右侧的气囊组件8-2支撑并限位患者移动,左侧气囊组件8-2可相应的减少充气量以保证翻身效果并减少患者受到气囊的挤压力。
35.所述传送带收放辊6-3两端均与所述走行车6可拆卸连接,参见图7,传送带收放辊6-3的两端均设置有收放辊转接管6-31,收放辊转接管6-31中部对应走行车收放电机6-1的输出轴设置有输出轴孔用于和走行车收放电机6-1的输出轴连接,收放辊转接管6-31侧壁上对应输出轴孔开设有螺栓孔用于穿设螺钉实现收放辊转接管6-31与走行车收放电机6-1的可拆卸连接,所述上传送带8上对应所述传送带收放辊6-3间隔设置有若干的束带过孔8-3,所述束带过孔8-3用于穿设束带8-4以限位上传送带8的收放。本实施例中收放辊转接管6-31的外壁上套设有橡胶套,用于拆下送带收放辊6-3并施加束带8-4后,使翻转模块具有担架的功能,方便术前和术后对患者的转移。
36.如图8所示,所述下传送带收放机构7包括对称设置在两所述支撑架3上的两收放辊支撑座7-3、旋转且可拆卸设置在两所述收放辊支撑座7-3之间的下传送带收放辊7-1和设置在所述收放辊支撑座7-3之间的变向辊7-4。所述下传送带9经所述变向辊7-4变向后缠绕在所述下传送带收放辊7-1上,任一所述收放辊支撑座7-3上对应所述下传送带收放辊7-1设置有收放电机7-2,所述收放电机7-2用于控制所述下传送带收放辊7-1旋转以控制所述下传送带9左右移动。本实施例中,下传送带收放辊7-1两端的的拆卸结构,可参考收放辊转接管6-31的拆卸结构。
37.本实施例中,在手术床1的一侧设置有电控模块和气泵模块,用于智能控制翻转驱动模块、翻转模块和平移模块的工作。
38.参见图7、图8和图9,本实施例的上传送带8的下端面上均匀设置有若干的棱条形成上传送带齿面8-1,下传送带9的上端面上对应所述上传送带齿面8-1设置有若干的棱条形成下传送带齿形面9-1,所述上传送带齿面8-1与所述下传送带齿形面9-1啮合用于所述下传送带9位移时带动所述上传送带8位移,使患者在体位变换后能平移居中,方便施术。
39.本实施例的一种使用方法如下:1、术前将装有传送带收放辊7-1的下传送带9铺设在手术床床面1-1上。再将翻转模块铺设在下传送带9上,患者躺在上传送带8上进行麻醉;或通过担架形式的翻转模块将病人转移到下传送带9上。
40.2、通过走行车6将翻转驱动模块的行星轨道5滑出到位。
41.2、将翻转驱动模块推至手术床1左右的预设位置停靠,将传送带收放辊7-1和传送带收放辊6-3分别安装到放辊支撑座7-3和走行车6上,并驱动传送带收放辊7-1和传送带收放辊6-3分别将下传送带9和上传送带8收卷紧。
42.3、根据患者体型对定位气囊组件8-2充气。
43.4、开启走行车固定扣4-2,手术床1一侧的两走行车6带动传送带收放辊6-3上行,同时带动患者一侧翻起实现体位的翻转,同时医护人员可从手术床1的另一侧辅助患者快速翻身到位。
44.5、传送带收放辊6-3上行一侧传送带收放辊7-1收卷下传送带9(另一侧放出),通过下传送带9和上传送带8之间的齿形面结构带动患者居中。
45.6、走行车6复位,之后拆下传送带收放辊7-1和传送带收放辊6-3,最后移开翻转驱动模块进行手术。
46.优选的,本实施例的走行车机构位于手术床1的床头和床尾处,当进行患者腰部手术时,本实施例装置的走行车6复位后并不妨碍手术进行,即走行车6复位后驱动行星轨道5复位,之后可进行手术而不用移走翻转驱动模块,加快了手术进程。
47.尽管参照前述实施例对本发明进行了详细的说明,本领域技术人员依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1