改进的游戏踏板组件的制作方法
改进的游戏踏板组件
背景技术:
1.物理计算机外围接口设备可以包括可以用作用户(人)与计算设备之间的接口的任何辅助设备。计算设备的一些示例可以包括台式计算机、膝上型计算机、游戏控制台、娱乐平台、移动设备或其他适合的“主”计算系统。由人物理地操纵的外围设备的一些示例可以包括计算机鼠标、键盘、操纵杆、方向盘、游戏踏板、游戏控制器、演示器(presenter)、遥控器、智能电话、智能可穿戴设备等。
2.游戏踏板(也称为“游戏踏板系统”、“踏板系统”、“游戏踏板组件”、“踏板组件”等)是特定类型的外围接口设备,游戏踏板通常与游戏应用(例如,驾驶模拟器、飞行模拟器)结合使用,以模拟对真实交通工具比如机动车、船只或飞行器中的踏板控制件的操作。对于驾驶模拟器,游戏踏板通常包括一组不对称的踏板,以模拟真实机动车中的加速器、制动器和离合器踏板。在飞行模拟器中,游戏踏板通常包括一组对称的踏板,这一组对称的踏板模拟飞行器中的方向舵控制件和脚踏制动器(toe brake)。游戏踏板通常可以包括任何适合类型的脚致动式踏板,以电子地控制任何适合类型的软件应用。
3.游戏踏板系统自其出现以来已经经历了许多进步和改进,并且游戏踏板系统对于很多用户、特别是视频游戏社区中的用户而言仍然是重要的附件(外围设备)。与其真实的对应设备类似的对外围设备的实际物理操作对于良好的用户体验“ux”而言、并且尤其是对于在电子竞技比赛的顶级梯队中竞赛的用户而言可能是很重要的。尽管已有很多进步,但仍需要更多改进。
4.应当指出的是,除非在本文中另外说明,否则本部分中描述的材料不是本申请中的权利要求的现有技术,并且不因包括在本部分中而被认为是现有技术。
技术实现要素:
5.在某些实施方式中,一种游戏踏板组件包括基础平台、踏板臂和具有阻力特性(resistance profile)的活塞组件,其中,踏板臂包括:第一端部,该第一端部在第一安装位置处以可旋转的方式联接至基础平台,该第一安装位置提供踏板臂相对于基础平台的第一旋转轴线;以及第二端部,该第二端部包括用户接口区域。活塞组件可以包括顶部端部,该顶部端部在构造于踏板臂的第一端部与第二端部之间的联接位置处以可旋转的方式联接至踏板臂,该联接位置提供活塞组件相对于踏板臂的第二旋转轴线。活塞组件还可以包括底部端部,该底部端部在第二安装位置处以可旋转的方式联接至基础平台,该第二安装位置提供活塞组件相对于基础平台的第三旋转轴线,其中,活塞组件响应于踏板臂的第二端部的用户接口区域接收到压力而根据活塞组件的阻力特性受压缩。在一些方面,活塞组件还可以包括:筒形壳体;包括活塞的轴,活塞在活塞组件被压缩和释放时于筒形壳体内线性移动;以及构造在筒形壳体内的一个或更多个阻尼单元。
6.在一些情况下,活塞可以响应于踏板臂的第二端部接收到压力而压靠所述一个或更多个阻尼单元,并且所述一个或更多个阻尼单元可以提供阻力特性。如下面进一步描述的,所述一个或更多个阻尼单元可以由聚氨酯块、一个或更多个机械弹簧、泡沫、海绵、弹性
体或其他适合的材料构成。游戏踏板组件还可以包括在第二安装位置处联接至基础平台的横向销(cross pin),该横向销定向成垂直于活塞组件的取向,其中,活塞组件的底部端部经由横向销以可旋转的方式联接至基础平台。在一些实施方式中,活塞组件的底部端部形成鞍形接口,其中,横向销包括筒形部分,并且其中,活塞组件的鞍形接口以互补的配合关系联接至横向销的筒形部分。
7.在一些实施方式中,活塞组件包括快速释放架构,使得活塞组件经由压缩配合而联接至横向销,其中,活塞组件构造成在活塞组件被手动压缩成足以克服所述压缩配合而使鞍形接口与横向销的筒形部分分开时与横向销和基础平台断开联接。活塞组件的底部端部可以在横向销的第一位置处以可旋转的方式联接至基础平台,并且横向销可以在与第一位置相反的第二位置处联接有应变仪。应变仪可以配置成检测横向销的变形的量,该变形的量对应于施加至用户接口区域的力的量。横向销可以包括多个凹部,所述多个凹部构造成减小横向销的刚度,从而使响应于施加至用户接口区域的力的量的变形增加。在一些方面,用户接口区域联接有踏板平台,该踏板平台成形为制动器踏板平台、加速器踏板平台或离合器踏板平台中的一者。基础平台可以固定地联接至构造为容置多个基础平台的底盘。
8.在一些实施方式中,一种游戏踏板系统包括:基础平台,该基础平台包括第一横向销和第二横向销;踏板臂,该踏板臂包括第一端部和包括用户接口区域的第二端部,其中,第一端部在第一横向销处以可旋转的方式联接至基础平台,该第一横向销提供踏板臂相对于基础平台的第一旋转轴线;以及具有阻力特性的活塞组件,并且该活塞组件包括顶部端部和底部端部,其中,顶部端部在构造于踏板臂的第一端部与第二端部之间的联接位置处以可旋转的方式联接至踏板臂,该联接位置提供活塞组件相对于踏板臂的第二旋转轴线,并且,底部端部经由第二横向销以可旋转的方式联接至基础平台,该第二横向销提供活塞组件相对于基础平台的第三旋转轴线。在一些情况下,活塞组件响应于踏板臂的第二端部的用户接口区域接收到压力而根据活塞组件的阻力特性受压缩。在一些实施方式中,活塞组件的底部端部形成鞍形接口,其中,第二横向销包括筒形部分,并且其中,活塞组件的鞍形接口以互补的配合关系联接至该横向销的筒形部分。
9.在某些实施方式中,活塞组件可以包括快速释放架构,使得活塞组件经由压缩配合而联接至横向销,其中,活塞组件构造成在活塞组件被手动压缩成足以克服所述压缩配合而使鞍形接口与横向销的筒形部分分开时与横向销和基础平台断开联接。在某些实施方式中,活塞组件还可以包括:筒形壳体;包括活塞的轴,活塞在活塞组件被压缩和释放时于筒形壳体内线性移动;以及构造在筒形壳体内的一个或更多个阻尼单元。在这种情况下,活塞可以响应于踏板臂的第二端部接收到压力而压靠所述一个或更多个阻尼单元。所述一个或更多个阻尼单元可以提供阻力特性。
10.在另外的实施方式中,一种踏板系统包括:基础平台,该基础平台包括第一横向销和第二横向销;踏板臂,该踏板臂在第一横向销处以可旋转的方式联接至基础平台;活塞组件,该活塞组件包括以可旋转的方式联接至踏板臂的顶部端部以及以可旋转的方式联接至第二横向销的底部端部;以及应变仪,该应变仪联接至第二横向销并且配置成检测横向销的变形的量,该变形的量对应于施加至踏板臂的力的量。在一些方面,第二横向销可以包括多个凹部,所述多个凹部构造成减小第二横向销的刚度,从而使响应于施加至用户接口区域的力的量的变形增加。在一些方面,活塞组件的底部端部形成鞍形接口,其中,第二横向
销包括筒形部分,并且其中,活塞组件的鞍形接口以互补的配合关系联接至第二横向销的筒形部分。第二横向销还可以包括与筒形部分相反的平坦表面,并且其中,应变仪在该平坦表面上联接至应变仪。
11.本概述不意在标识所要求保护的主题的关键或必要特征,也不意在单独地用于确定所要求保护的主题的范围。本主题应当通过参照本公开的整个说明书的适当部分、任何或所有附图以及每项权利要求来理解。
12.前述以及其他特征和示例将在下面于说明书、权利要求书和附图中更详细地描述。
附图说明
13.上面描述的各种实施方式的特征以及本发明的某些实施方式的其他特征和优点将根据以下结合附图进行的详细描述而变得更加明显,在附图中:
14.图1示出了根据某些实施方式的娱乐系统的示例,该娱乐系统可以包括多种主计算设备和包含游戏踏板的外围设备中的任一者。
15.图2示出了根据某些实施方式的配置成操作外围输入设备(例如,游戏踏板)的系统框图。
16.图3a和图3b示出了根据某些实施方式的包括多个踏板的游戏踏板组件。
17.图4a示出了根据某些实施方式的多种踏板类型所通用的基础模块的各方面。
18.图4b示出了根据某些实施方式的基础模块的某些方面的横截面。
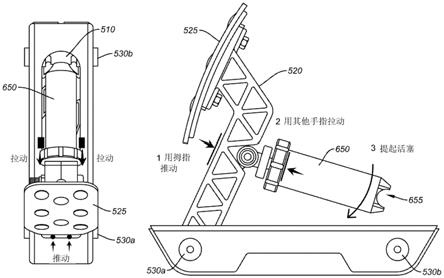
19.图5示出了根据某些实施方式的构造为制动器踏板的基础模块。
20.图6a示出了根据某些实施方式的用于踏板模块的活塞组件的横截面。
21.图6b示出了根据某些实施方式的用于踏板模块的另一活塞组件的横截面。
22.图7示出了根据某些实施方式的制动器踏板活塞组件的某些方面的横截面。
23.图8a示出了根据某些实施方式的制动器踏板活塞组件的活塞帽上部的横截面。
24.图8b示出了根据某些实施方式的制动器踏板活塞组件的活塞帽上部的替代实施方式的横截面。
25.图9a示出了根据某些实施方式活塞轴可以如何联接至活塞帽上部。
26.图9b示出了图9a的替代实施方式。
27.图10a示出了根据某些实施方式t形接头和活塞轴可以如何联接。
28.图10b示出了图10a的替代实施方式。
29.图11示出了根据某些实施方式的制动器踏板组件的各方面。
30.图12示出了根据某些实施方式的阻抑器替换过程的各方面。
31.图13示出了根据某些实施方式的阻抑器替换过程的各方面。
32.图14a示出了根据某些实施方式的阻抑器替换过程的各方面。
33.图14b示出了根据某些实施方式的活塞组件的分解图。
34.图15示出了根据某些实施方式的阻抑器替换过程的各方面。
35.图16示出了根据某些实施方式的阻抑器替换过程的各方面。
36.图17示出了根据某些实施方式的加速器或离合器偏置机构替换过程的各方面。
37.图18示出了根据某些实施方式的用于游戏踏板组件的横向销的各方面。
38.图19a示出了根据某些实施方式的位于横向销上的应变仪传感器的构型。
39.图19b示出了根据某些实施方式的应变仪传感器电路图的各方面。
40.图20示出了根据某些实施方式的用于对游戏踏板组件上的应变仪数据进行处理的电路图。
41.贯穿附图,应当指出的是,相同的附图标记通常用来描绘相同或类似的元件、特征和结构。
具体实施方式
42.根据某些实施方式,本公开的各方面总体上涉及计算机外围设备,并且更具体地涉及游戏踏板系统。
43.在以下描述中,对游戏踏板系统的各种示例进行了描述。出于解释的目的,阐述了具体的构型和细节以便提供对实施方式的透彻理解。然而,对于本领域技术人员而言将明显的是,可以在不公开每一个细节的情况下实践或实施某些实施方式。此外,公知的特征可以被省略或简化,以便防止任何对本文中所述的新颖特征的混淆。
44.以下高度概述意在提供对在附图中描绘并在下面提供的相应描述中呈现的一些新颖的创新之处的基本理解。本发明的各方面涉及一种可以与许多软件应用结合使用的游戏踏板系统,这些软件应用通常可以包括交通工具模拟器(例如,机动车模拟器、海军舰船模拟器和飞行器模拟器)。游戏踏板系统(例如,参见图3a)可以包括多个踏板(例如,加速器、制动器、离合器),这些踏板各自可以提供逼真的阻力特性,该阻力特性模拟对应的真实踏板在被用户下压时如何作出反应。一些用户可能对他们希望阻力特性如何修整(file)是特别关注的。一些现代的踏板系统允许用户调整这些踏板系统的阻力特性,但是该过程会是复杂的、繁重的、会涉及专门的工具和专业知识,并且该过程通常是非常耗时的。本发明的各方面利用下述技术方案解决了该技术问题:该技术方案包括提供一种新颖的快速更换组件(例如,活塞组件),该快速更换组件允许用户在没有任何专用工具或装备的情况下用手在少于一分钟的时间内快速改变踏板(例如,制动器、加速器、离合器)的阻力特性(例如,参见图12至图16)。
45.通过示例的方式,一些实施方式可以包括一种游戏踏板组件,该游戏踏板组件包括基础平台和踏板臂,该踏板臂包括第一端部以及包括用户接口区域的第二端部,其中,第一端部在第一安装位置处以可旋转的方式联接至基础平台,该第一安装位置提供踏板臂相对于基础平台的第一旋转轴线。该游戏踏板可以包括具有阻力特性的活塞组件,并且该活塞组件包括顶部端部和底部端部,其中,顶部端部在构造于踏板臂的第一端部与第二端部之间的联接位置处以可旋转的方式联接至踏板臂,该联接位置提供活塞组件相对于踏板臂的第二旋转轴线,并且,底部端部在第二安装位置处以可旋转的方式联接至基础平台,该第二安装位置提供活塞组件相对于基础平台的第三旋转轴线。活塞组件可以响应于踏板臂的第二端部的用户接口区域接收到压力而根据活塞组件的阻力特性受压缩。活塞组件可以包括:筒形壳体;包括活塞的轴,活塞在活塞组件被压缩和释放时于筒形壳体内线性移动;构造在筒形壳体内的一个或更多个阻尼单元(例如,聚氨酯块、机械弹簧等),其中,活塞响应于踏板臂的第二端部接收到压力而压靠所述一个或更多个阻尼单元,并且所述一个或更多个阻尼单元提供阻力特性。在一些实施方式中,踏板臂可以具有多个联接位置,例如包括下
面描述的锚定点524、以及位于锚定点524上方和/或下方的一个或更多个另外的锚定点。此类实施方式可以允许用户基于踏板臂和偏置机构(例如,活塞组件)的联接位置以及如下面进一步描述的阻尼单元来改变特定踏板的某些性能特征(例如,阻力特性)。
46.现代游戏踏板系统的另一技术问题包括对踏板位移和/或施加至踏板的力的检测不准确,这通常归因于包括传感器安置及实施在内的许多因素。本发明的各方面通过将应变仪传感器以下述方式结合到踏板组件中(例如,结合在横向销上)的某些实施方式而提供了针对该问题的技术解决方案:由于具有提供改进的性能特征的结构改型的新型横向销而提供了更可靠、可重复且准确的测量(例如,参见图18至图20)。通过示例的方式,在一些实施方式中,游戏踏板组件可以包括在第二安装位置处联接至基础平台的横向销,该横向销定向成垂直于活塞组件的取向,其中,活塞组件的底部端部为鞍形接口并且经由横向销以可旋转的方式连接至基础平台。横向销可以包括筒形部分,并且活塞组件的鞍形底部部分以互补的配合关系联接至横向销的筒形部分,该互补的配合关系可以允许在活塞组件被手动压缩成足以克服使鞍形接口与横向销的筒形部分分开的压缩配合时快速断开联接。在这种实施方式中,应变仪可以在与第一位置相反的第二位置处联接至横向销,并且应变仪可以配置成检测横向销的变形的量,该变形的量对应于施加至用户接口区域的力的量。横向销可以包括多个凹部,所述多个凹部构造成减小横向销的刚度,从而使响应于施加至用户接口区域的力的量的变形增加。这些及其他新颖概念在下面的实施方式中进一步描述。
47.图1示出了根据某些实施方式的娱乐系统100的示例,该娱乐系统100可以包括多种主计算设备和包含游戏踏板的外围设备中的任一者。本文中描述的典型主计算设备可以包括游戏系统105、台式计算机110、膝上型计算机115或任何其他适合的主计算设备(例如,娱乐系统、机顶盒、智能电话、智能可穿戴设备等)中的任一者。典型的外围设备可以包括键盘125、计算机鼠标130、游戏方向盘135、游戏控制器140、移位器(shifter)145、操纵杆150、游戏椅155、游戏踏板系统160或其他适合的外围设备(例如,演示器设备、遥控器、耳机、触觉启用的可穿戴设备比如手套、服装等、虚拟和/或增强现实控制器比如触笔设备和/或3自由度/6自由度控制器、踏板等)中的任一者。
48.主计算设备在本文中可以被称为“主计算机”、“主设备”等,并且主计算设备可以包括配置为存储计算机代码的机器可读介质(未示出)比如驱动器软件、固件等,其中,计算机代码能够由主计算设备的一个或更多个处理器执行,以控制一个或更多个外围输入设备。
49.外围输入设备可以被称为“输入设备”、“外围设备”等。应当理解,尽管本文中描绘的大多数实施方式集中于涉及游戏踏板系统的应用,但是本领域普通技术人员将理解如何对适用于非游戏相关应用的这些概念进行改写。例如,本文中描述的游戏踏板系统的实施方式可以用于控制电动车辆(例如,来自游戏踏板系统的控制信号可以用于调节加速或制动的实施等)。
50.在对一些实施方式的描述中,系统100通常可以被称为台式或膝上型计算设备。然而,应当理解,系统100可以是还包括平板计算机、智能电话、虚拟或增强现实接口(例如,具有2d或3d显示的虚拟或增强现实接口)、全息接口、用于仪器的控制器等的任何适合的计算设备。本领域普通技术人员将理解该系统100的很多变型、改型和替代实施方式。
51.图2示出了根据某些实施方式的用于操作外围输入设备(例如,游戏踏板系统160)
的系统200。系统200可以包括处理器210、存储器220、电力管理系统230、通信系统240、输入检测模块250和输出控制模块260。系统块220至260中的每个块可以与处理器210(例如,经由总线系统)电通信。系统200还可以包括另外的功能块,这些另外的功能块未示出或未讨论,以防止混淆本文中描述的新颖特征。系统块220至260可以被实施为单独的模块,或者替代性地,多于一个的系统块可以被实施在单个模块中。在本文中描述的上下文中,系统200可以如至少关于图1和图3至图20所示和描述的那样被结合到游戏踏板系统160中。如以下进一步描述的,系统2000的各方面可以全部或部分地并入到系统200中,或者系统200的各方面可以全部或部分地并入到系统2000中(例如,处理器2020可以对应于处理器210)。
52.在某些实施方式中,处理器210可以包括一个或更多个微处理器并且可以配置成控制系统200的操作。替代性地,如本领域普通技术人员将理解的,处理器210可以包括具有支持的硬件和/或固件(例如,存储器、可编程i/o等)的一个或更多个微控制器(mcu)、数字信号处理器(dsp)等。处理器210可以控制输入设备135的操作的一些或全部方面(例如,系统块220至260)。替代性地或附加地,系统块220至260中的一些系统块可以包括可以与处理器210协同工作的附加的专用处理器。处理器210可以位于外围设备本地(例如,被包含于外围设备中)、可以位于外围设备外部(例如,进行外部处理,比如通过相应的主计算设备进行外部处理)或其组合。如下面进一步描述的,图20的处理器2020可以与处理器210相同或者可以与处理器210协同工作。本领域的普通技术人员将理解可能的许多变型、改型和替代实施方式。
53.存储器220可以配置成存储与输入设备135的一种或更多种操作配置有关的信息。如下面进一步讨论的,输入设备135的一种或更多种操作配置可以包括对游戏踏板系统160的性能特征进行设定、包括但不限于对触觉反馈、照明方案或其他电气特性进行控制的用户设定。在一些情况下,存储器220可以包括用于游戏踏板系统160的游戏踏板(例如,制动器、加速器、离合器)上的一个或更多个应变仪和/或测压元件(load cell)的保存的校准设定。应当指出,应变仪是传感器,并且测压元件可以是变换器(例如,传感器加上变形材料,比如踏板臂)。
54.另外,存储器220可以存储要由处理器(例如,处理器210中的处理器)执行的一个或更多个软件程序。应当理解,“软件”可以指代指令序列,这些指令序列在由处理单元(例如,处理器、处理设备等)执行时使系统200执行软件程序的某些操作。这些指令可以存储为驻留在只读存储器(rom)中的固件和/或存储在媒体存储器中的应用程序,该应用程序可以被读取到存储器中以供处理装置处理。软件可以实施为单个程序或独立程序的集合,并且软件可以存储在非易失性存储器中并在程序执行期间全部地或部分地复制到易失性工作存储器。
55.电力管理系统230可以配置成管理用于输入设备135的电力分配、再充电、电力效率、触觉马达电力控制(例如,输出缩放(output scaling),如在下面至少关于图3至图5进一步描述的)等。在一些实施方式中,电力管理系统230可以包括电池(未示出)、用于电池的基于usb的再充电系统(未示出)以及电力管理设备(例如,未示出的电压调节器)。在某些实施方式中,由电力管理系统230提供的功能可以并入到处理器210中。电源可以是可更换电池、可再充电能量存储设备(例如,超级电容器、锂聚合物电池、nimh、nicd)、或有线电源。再充电系统可以是附加的线缆(专用于再充电的目的),或者再充电系统也可以使用usb连接
为电池再充电。
56.根据某些实施方式,通信系统240可以配置成提供与对应的主计算设备(例如105、110、115)或其他设备和/或外围设备的无线通信。通信系统240可以配置成提供射频(rf)、红外(ir)、或其他适合的通信技术以与其他计算设备和/或外围设备进行通信。系统200可以可选地包括到对应的主计算设备的硬线连接。例如,输入设备135可以配置成接收通用串行总线(usb)线缆以实现与对应的主计算设备或其他外部装置的双向电子通信。一些实施方式可以利用不同类型的线缆或连接协议标准来建立与其他实体的硬线通信。在一些方面,通信端口(例如,usb)、电源端口等可以被认为是本文中描述的其他块(例如,输入检测模块150、输出控制模块260等)的一部分。
57.输入检测模块250可以控制对与输入设备160上的输入元件的用户交互的检测。例如,输入检测模块250可以检测通过将游戏踏板系统上的一个或更多个踏板(例如,制动器、加速器、离合器等)或其他适合的输入元件或设备比如按钮、触摸传感器(例如,触摸板)、开关等下压而引起的用户输入。在一些情况下,游戏踏板系统160上的输入元件可以按人体工程学配置为能够利用用户的脚控制。在一些实施方式中,输入检测模块250可以与存储器220协同工作,以检测输入设备160上的输入并将各种功能(例如,测量踏板偏转)与各个输入元件相关联。在一些方面,输入检测模块可以包括一个或更多个应变仪和/或测压元件,以检测用户以多大的力度将游戏踏板中的一个或更多个踏板下压,如下面关于图18至图20进一步描述的。
58.在一些实施方式中,输出控制模块260可以对用于对应的外围输入设备的各种输出进行控制。例如,游戏踏板系统160可以包括多个led、显示器、音频输出(例如,扬声器)、触觉效果能力件(haptic effect capability)等。受益于本公开的本领域普通技术人员将理解输出控制模块260的许多改型、变型和替代实施方式。
59.如本领域普通技术人员将理解的,尽管可能没有明确地讨论某些系统,但是这些系统应当被认为是系统200的一部分。例如,系统200可以包括用以向系统200中的不同系统和从系统200中的不同系统传送电力和/或数据的总线系统。
60.应当理解,系统200是说明性的,并且变型和改型是可能的。系统200可以具有本文中未具体描述的其他能力。此外,尽管参照特定的块描述了系统200,但是应当理解,这些块是为了便于描述而定义的,并且不意在暗示各组成部分的特定物理布置。此外,这些块不需要对应于物理上不同的部件。块可以配置成例如通过对处理器进行编程或提供适当的控制电路来执行各种操作,并且各种块根据如何获得初始配置而能够或不能够重新配置。
61.本发明的实施方式可以在包括使用电路和软件的任何组合而实施的电子设备的各种装置中实现。此外,系统200的各方面和/或各部分可以根据设计需要而与其他子系统组合或由其他子系统操作。例如,输入检测模块250和/或存储器220可以在处理器210内操作,而非用作单独的实体。另外,本文中描述的发明构思也可以应用于任何外围设备。此外,系统200可以应用于本文中的实施方式中描述的、无论是明确地、参照地或是默示地描述的(例如,将被本领域的普通技术人员获知能够适用于特定的输入设备中的)输入设备中的任何输入设备。前述实施方式并非意在是限制性的,并且受益于本公开的本领域普通技术人员将理解无数种应用和可能性。
62.图3a和图3b示出了根据某些实施方式的包括多个踏板的游戏踏板系统300。游戏
踏板系统(“踏板系统”或“游戏踏板组件”)300可以是通常配置成作为脚控制式输入设备操作的用于任何主计算机(例如,台式/膝上型计算机、游戏控制台等)的计算机外围设备。在一些实施方式中,游戏踏板系统300可以与在主计算机(110)上运行的驾驶模拟器软件应用(或者海军的、航行的或其他适合的移动飞行器)协同使用,并且可以提供关于机动车踏板组件会感觉如何的逼真模拟,包括由真实车辆中的加速器、制动器和离合器踏板提供的特定的操作阻力曲线。此外,游戏踏板系统300可以包括可以允许用户快速改变针对每个踏板的阻力特性的快速更换组件,该快速更换组件可以涉及以简单直观的方式换出各种偏置机构、包括弹性体(例如,聚氨酯)、机械弹簧等,这在下面进一步描述。此外,游戏踏板系统300可以包含使用如下面详细描述的许多新颖的创新之处进行的精确的力检测和踏板位移感测。
63.游戏踏板系统300可以包括底盘(也称为“地板底盘”或“基部底盘”)310和包括离合器模块320、制动器模块330和加速器模块340的多个踏板模块。应当理解,尽管本文中描述的各种实施方式总体上针对于机动车踏板,但是可以使用具有不同踏板功能的其他踏板类型,比如飞行器中的方向舵控制器、制动器和转向踏板。受益于本公开的本领域普通技术人员将理解其许多改型、变型和替代实施方式。
64.底盘310可以由坚固且优选地较重的材料(例如,钢、铝)构造和/或包含相对较重的压载物,使得游戏踏板系统在用户向踏板施加力时不会沿着下面的表面移动。在一些实施方式中,底盘通常为3kg至4kg,每个踏板模块可以重约650g至750g,并且整个组件(例如,具有3个踏板模块的底盘)可以重约5kg至6kg。其他重量(例如,更重或更轻的重量)对于本文中描述的游戏踏板系统的底盘、踏板模块或任何特征、部件等而言也是可能的。踏板模块中的每个踏板模块可以以任何合适的方式(例如,螺钉、销、螺栓、槽、摩擦配合等)固定地联接至底盘310,并且优选的一种情况是,将踏板模块在底盘310上的任何可用的踏板模块接收位置(例如,踏板模块可以安置的位置——游戏踏板系统300上示出了三个位置)处牢固地紧固至底盘。踏板模块中的每个踏板模块可以包括具有不同偏置系统的通用踏板组件,使得踏板模块可以是模块化的并且能够在底盘310上互换。例如,一些实施方式可以根据用户偏好来切换制动器和离合器踏板的位置。在一些情况下,对于使用自动变速器控制式传动系的车辆模拟器,用户可能仅想要加速器和制动器实现方式。
65.每个踏板模块可以包含各种类型的踏板(例如,离合器、制动器、加速器、方向舵、转向装置等)上的通用部件(称为“基础模块”),以便很多踏板应用很多不同的应用和改型。例如,每个踏板模块可以包括基础平台(例如,410)、踏板臂(例如,420)以及一个或更多个横向销,所述一个或更多个横向销可以各自为踏板臂和基于踏板模块的类型的相应的快速改变偏置模块(例如,活塞组件540)提供旋转轴线,如在下面进一步更详细描述的,快速改变偏置模块可以包括具有弹性偏置机构、基于硬件的偏置机构等的活塞组件。受益于本公开的本领域普通技术人员将理解,尽管贯穿本公开最为频繁地描述了制动器模块330,但是应当理解,本文中描述的许多新颖概念可以应用于其他类型的踏板。底盘310可以容置附加元件部分,该附加元件部分包括电子设备(例如,系统200、2000)、硬件(例如,线束)或为防止混淆本文中提出的新颖概念而未进行描述但是将被受益于本公开的本领域普通技术人员所理解的其他细节。
66.图4a示出了根据某些实施方式的多种踏板类型所通用的基础模块400的各方面。
踏板模块400的部件可以包括基础平台410、踏板臂420以及横向销430a和430b。基础平台410可以构造成通过任何适合的联接方式(例如,螺钉、螺栓、开槽/摩擦配合等)(在任何可用的踏板模块位置处)固定地联接至底盘310。踏板臂420可以包括第一端部和第二端部,其中,第一端部在第一安装位置(例如,横向销430a)处以可旋转的方式联接至基础平台410,第一安装位置提供踏板臂相对于基础平台的第一旋转轴线,如通过弧422部分地示出的旋转。即,横向销430a可以像转轴(axle)一样操作成使踏板臂420沿着由横向销430a限定的轴线旋转。踏板臂420的第二端部可以联接至踏板平台(例如,制动器踏板平台),该踏板平台通常是其中用户通过推压踏板平台来向踏板模块提供用户输入的接口。踏板平台(未示出)对于踏板模块的操作而言不是必需的,然而踏板平台可以提供更大的表面面积以便用户舒适地提供将踏板下压的力。应当指出,踏板平台也可以被称为“用户接口区域”,因为用户通常用他们的脚在踏板平台上施加力。还应指出,横向销430a和430b(以及横向销430a和430b的等效部件——例如530a和530b)在本文中也称为“第一”横向销(例如430a、530a)和“第二”横向销(例如430b、530b、1800)。
67.踏板臂420可以包括构造在踏板臂的第一端部与第二端部之间的联接位置(锚定点)424,该联接位置提供偏置模块(例如,活塞组件——在下面进一步描述;应当指出,偏置模块在各踏板模块之间通常不同并且因此通常不是通用的基础模块的一部分)相对于踏板臂的第二旋转轴线。横向销430b可以配置成联接至偏置模块的相反端部,以提供偏置模块相对于基础平台的第三旋转轴线。在一些方面,偏置模块可以相对于横向销430b旋转得很少。例如,在一些实施方式中,为了旋转约3.7
°
,偏置模块(例如,活塞组件)之间的角度可以在约31.5
°
与28.78
°
之间变化。受益于本公开的本领域的普通技术人员将理解,一些实施方式可以旋转得更少(例如,约2.5
°
)或更多。
68.如上面指出的,基础模块400对于每种踏板类型可以是通用的并因此可以以模块化的方式操作。例如,用户可以将基础模块400从底盘300上的一个位置移动至另一位置。在一些情况下,踏板平台和偏置模块可以被换出,使得踏板以不同的阻力特性操作,如下面进一步描述的。在这种情况下,力感测和制动器偏转检测可能必须被修改为相应的配置(例如,使得加速器像加速器而非像离合器或制动器一样以物理的和电子的方式操作)。然而,横向销430b在某些实现方式之间可以不同。例如,配置为制动器踏板的基础模块400(例如,如图5中所示)可以使用如图18中所示的横向销,而离合器实现方式或加速器实现方式可以使用未配置有以类似方式定位的应变仪传感器的横向销。受益于本公开的本领域普通技术人员将理解其许多改型、变型和替代实施方式。
69.在一些实施方式中,基础模块可以是独立的模块。例如,基础模块可以搁置在一表面上而非底盘310上。在这种情况下,为了良好的用户体验,将可能对基础模块进行适合的调整,以确保足够的重量和稳定性。
70.图4b示出了根据某些实施方式的踏板模块400的某些方面的横截面。具体地,图4b示出了联接至基础平台410的横向销430a的横截面。在一些方面,横向销430a可以通过任何适合的手段固定地联接至基础平台410。参照图4b,横向销430a可以是单个件或具有用于牢固的螺纹配合联接的螺纹432的螺钉及螺母组件。受益于本公开的本领域普通技术人员将理解,将横向销430a和430b联接在一起的其他方法也是可能的(例如,摩擦配合、闩锁等)。在一些情况下,踏板臂420可以通过所示的一个或更多个轴承434或促进踏板臂420相对于
横向销430a绕由横向销430a提供的旋转轴线平稳旋转的其他机械手段来相对于横向销430a旋转。基础平台410通常包括凹槽412,踏板臂在该凹槽内沿着弧422旋转。在一些情况下,横向销430a可以如图4b中所示的那样穿过踏板臂420中的孔。
71.横向销430b可以以与横向销430a类似的方式构造在基础平台410内。然而,横向销430b与偏置模块(例如,活塞组件540)之间的联接关系可以以允许偏置模块快速断开联接的方式配置,该联接关系通常是横向销的筒形部分与偏置模块的联接至横向销的端部处的鞍形(“u形”)接口之间的互补的配合关系,如下面进一步描述。横向销430a和430b通常如图4a和图4b中所示的那样以法向于踏板臂420的取向并沿着基础平台410的宽度延伸的方式安装在基础平台410上。
72.图5示出了根据某些实施方式的构造为制动器踏板的踏板模块500。踏板模块500相对于另一类型的踏板(例如,加速器、离合器)而言操作起来且感觉像制动器踏板在很大程度上归因于所使用的偏置机构的类型。踏板模块500可以包括基础平台510、踏板臂520和构造为活塞组件的偏置机构540。踏板臂520的第一端部可以联接至横向销530a(例如,第一安装位置),横向销530a可以提供用于踏板臂520在基础平台510的凹槽512内旋转的旋转轴线。踏板臂520的第二端部可以联接至踏板平台525,踏板平台525可以构造成看起来像制动器型踏板平台。偏置机构540(“活塞组件540”)可以根据特定的阻力特性被压缩,该特定的阻力特性模拟了在被建模的类型的车辆(例如,高性能机动车)中制动器可以如何做出反应。活塞组件540的顶部端部可以在于第一端部与第二端部之间配置的联接位置处例如在锚定点524处联接至踏板臂520,该联接位置提供活塞组件相对于踏板臂的第二旋转轴线。活塞组件540的底部端部可以在横向销530b(例如,第二安装位置)处联接至基础平台510,该横向销530b提供活塞组件540相对于基础平台510旋转的第三旋转轴线。在操作中,在踏板臂(例如,通过用户的脚)被下压时,踏板臂向下旋转(例如,参见图4a的弧422)并根据由阻尼单元提供的阻力特性来压缩活塞组件540,如下文进一步描述。如上面关于图4a至图4b进一步描述的,基础平台510、横向销530a和530b以及踏板臂520可以形成可以对任何踏板类型通用的基础模块。踏板模块500可以联接至底盘(例如,底盘310)。
73.尽管本文中示出的实施方式中的许多实施方式包括单个联接位置(例如,锚定点524),但是应当指出,一些实施方式可以包含定位在锚定点524上方和/或锚定点524下方的多个联接位置。如受益于本公开的本领域普通技术人员将理解的,此类实施方式可以允许用户基于踏板臂和偏置机构(例如,活塞组件)的联接位置来改变特定踏板的某些性能特征(例如,阻力特性)。
74.图6a示出了根据某些实施方式的用于踏板模块的活塞组件600的横截面。活塞组件600可以根据由容置在活塞壳体内的多个阻尼单元提供的阻力特性而被压缩。活塞组件600可以包括t形接头610、活塞轴630、活塞帽上部620、轴承帽640、活塞壳体650、阻尼单元652、654和横向销接口655。提供了笛卡尔坐标605以便参照。如图6b中所示,并且如受益于本公开的本领域普通技术人员将理解的,一些实施方式(活塞组件680)可以包含用于更平稳/改进的操作的附加的轴承(682)和/或阻尼单元(652、654、656)。
75.t形接头610构造在活塞组件600的顶部端部处,并且t形接头610可以是将活塞组件600联接至踏板臂520的机构(例如,在锚定点524处),该t形接头610为活塞组件相对于踏板臂提供了旋转轴线。t形接头610以互补的螺纹配合布置固定地联接至活塞轴630,然而其
他联接方法(例如,压缩配合、硬件(例如,螺钉、螺栓、销等)、粘合剂、超声焊接等)也是可行的。下面关于图7进一步描述了t形接头610。活塞帽上部620可以通过任何适合的联接方法(例如,螺纹配合、硬件、粘合剂、超声焊接等)联接至活塞轴630和轴承帽640,活塞帽上部620、活塞轴630和轴承帽640形成了活塞销子组件。图8a示出了包括轴承622(例如,通过压配合)的活塞帽上部620的横截面。应当指出,本公开中对轴承的若干次引用也可以指衬套。活塞销子组件可以如所示的那样以互补的螺纹配合布置结构联接至活塞壳体650以实现快速释放架构,如下面至少关于图12至图15进一步描述的。替代性地,其他联接方法(例如,压缩配合、硬件(例如,螺钉、螺栓、销等)、粘合剂、超声焊接、自弹(push-push)比如弹簧加载等)也是可能的。活塞壳体650可以包括位于外部上以用于装饰作用的套筒,但是对于活塞组件600的正确操作不是必需的。阻尼单元652、654可以设置在活塞壳体650内并且可以由用以在活塞组件被压缩时提供阻力特性的任何适合的材料构成。如下面关于图14a和图14b进一步描述的,阻尼单元652、654(“阻抑器(dampener)”)可以由具有不同密度的、可以提供一系列阻力特性的任何适合的弹性体材料(例如,聚氨酯)构成。在一些实施方式中,可以使用其他类型的阻尼单元,比如基于硬件的实现方式(例如,弹簧)等。活塞组件的底部端部包括横向销接口655,该横向销接口655将活塞组件600在横向销530b处以可旋转的方式联接至基础平台510,并提供用于活塞组件相对于基础平台的旋转轴线(例如,类似转轴)。横向销接口655可以以鞍形外形(也称为u形外形)构造,该鞍形外形以互补配合关系联接至横向销530b,其中,u形形状的横向销接口655配合在横向销530b的筒形部分上。
76.在一些实施方式中,当活塞组件540静置时——这可以包括当活塞组件540与横向销530b断开连接时(如图12中所示)和/或当活塞组件540联接至横向销530但没有外力施加至制动器模块时(例如,假设在踏板臂上没有用户;没有对活塞壳体650进行压缩),在阻抑器与活塞壳体650的内部部分之间会存在一间隙。也就是说,阻抑器可以具有足够小的直径(由此,在阻抑器与活塞壳体650的内壁的至少一部分之间存在一间隙(例如1mm至2mm的间隙或其他适合的间隙)),使得阻抑器在活塞壳体650内部松弛地配合并且可以在活塞组件被拆开时(如图14a中所示)容易地滑入和滑出,这可以使用户容易地换出阻尼单元。该小间隙的另一优点是,当阻尼单元被压缩时,其直径会增加,直到其填满活塞壳体中的间隙为止。这会导致阻尼单元对压缩的阻力在阻尼单元无法在活塞壳体内进一步扩张时明显增加,这又影响了活塞组件540的阻力特性。作为用户体验特征,这会被用户感觉是在真实车辆中发生的“游戏”,在这种情况下,踏板(例如,制动器、加速器、离合器)最初容易被推动较短距离,随后随着用户继续将踏板下压,阻力明显增加。
77.在操作中,活塞销子组件通常在踏板被用户下压并且轴承帽压靠阻尼单元时于活塞壳体内沿着z轴上下移动。活塞壳体通常在z方向上保持固定,但可以在x轴上在横向销接口上旋转。即,活塞壳体650可以在活塞销子组件以类似活塞的方式在活塞壳体内移动时经由横向销接口655保持联接至横向销530b。例如,在一些实施方式中,为了旋转约3.7
°
,偏置模块(例如,活塞组件600)之间的角度可以在约31.5
°
至28.78
°
之间变化。受益于本公开的本领域的普通技术人员将理解,一些实施方式可以旋转得更少(例如,约2.5
°
)或更多。
78.横向销接口655的鞍形外形可以提供与横向销530b的牢固连接(例如,压缩配合),而无需像t形接头610固定地连接至踏板臂620。鞍形形状具有大到足以防止活塞组件600从横向销530b(沿x或y方向)滑出的凸缘(形成鞍形形状的侧部的凸缘),但是该鞍形形状不被
固定,使得用户可以快速将活塞组件600与基础平台510断开联接,例如以更换出阻尼单元,进而改变踏板模块500的阻力特性。在典型的实施方式中,用户可以拉动活塞壳体650(+z方向)以压缩活塞(例如,压缩成足以将横向销接口655的凸缘移开)并将活塞组件沿y方向移动成使得活塞组件600与基础平台510断开联接并且不再与横向销530b对准。一旦活塞组件600与横向销530b断开联接,活塞壳体650就可以通过拧松活塞子组件(例如,活塞子组件经由互补的螺纹关系或其他适合的联接方法联接)而从活塞子组件移除,这提供了对设置在活塞壳体650中的阻尼单元的触及,从而提供了允许用户无需任何特殊工具而快速且容易地换出阻尼单元以改变踏板模块的阻力特性的“快速释放”架构。在一些情况下,可以使用多个阻尼单元、包括易于压缩的软阻尼单元,以允许用户更容易执行快速释放过程。通常,软阻尼单元(例如,通常具有大于50%的高压缩比,例如图14b的泡沫阻尼单元1430)被压缩成足以在快速释放过程期间将横向销移开(称为“预行程”),但通常不会被压缩成比预行程距离更远(例如,在5mm至10mm内),因为其他更坚固的阻尼单元通常开始完全接合并提供阻力特性的大部分,如受益于本公开的本领域普通技术人员将理解的。在下面至少关于图12至图16更详细地描绘并描述了该过程。
79.图7示出了根据某些实施方式的制动器踏板活塞组件的某些方面的横截面。特别地,t形接头610可以包括中空的筒形部分,该中空的筒形部分可以在锚定点524处经由销以可旋转的方式联接至踏板臂520,该销可以穿过踏板臂520和t形接头610两者,该锚定点524提供活塞组件相对于踏板臂的旋转轴线。轴承612可以被包括在中空的筒形部分中,以提供t形接头610的平稳的、低摩擦的旋转,然而一些实施方式可以不包含轴承或衬套。替代性地,可以将一个或更多个衬套结合到踏板臂中而非t形接头中。螺纹部分614可以构造成将t形接头610固定地联接至活塞轴630,然而,可以使用其他联接机构(例如,压缩配合、开槽配合、销、粘合剂等),如受益于本公开的本领域普通技术人员将理解的。
80.图8a示出了包括轴承622的活塞帽上部620的横截面。如图9a中所示,活塞轴630联接至活塞帽上部620,并且t形接头610可以经由互补的螺纹锁定布置结构联接至活塞轴630,该互补的螺纹锁定布置结构包括t形接头610的螺纹614和活塞轴630的螺纹635,如图10a中所示。图8b、图9b和图10b示出了其替代实施方式。
81.图11示出了根据某些实施方式的制动器踏板组件500的各方面。图11类似于图5,但是呈后视立体图,以更好地图示活塞组件540的底部端部655与横向销530b之间的关系。图11示出了处于略微下压构型的制动器踏板组件500。
82.图12至图16示出了根据某些实施方式的阻抑器替换过程的各方面。如上面描述的,本发明的各方面提供了一种新颖的快速更换组件(例如,活塞组件),该快速更换组件允许用户在没有专用工具或装备的情况下用手在少于一分钟的时间内快速改变踏板(例如,制动器、加速器、离合器)的阻力特性。更具体地,用户可以快速地将偏置模块与基础平台断开联接以触及、换出阻尼单元,并将偏置模块重新联接至基础平台以获得期望的阻力特性。参照图12,为了将偏置模块(例如,活塞组件650)与基础平台510断开联接,用户可以用其拇指手动地推动踏板臂的前部部分(例如,参见步骤1的相应箭头)并同时拉动活塞组件540(例如,在活塞帽上部620处拉动活塞组件540;参见步骤2的相应箭头),以在活塞组件540上赋予强大到足以使得横向销接口655与横向销530b断开联接的压缩力。然后,用户可以提起活塞组件650(例如,参见步骤3的相应箭头;活塞组件540绕位于锚定点524处的旋转轴线旋
转,以允许活塞组件以图12中所示的方式被抬起),使得活塞组件650不再与横向销530b对准;并且然后释放由拇指(1)和手指(2)提供的压缩力,使得踏板臂520和活塞组件540静置。
83.一旦活塞组件540处于静止状态,则活塞组件540可以被拆开以触及并暴露内部的阻尼单元。参照图13,活塞组件540可以通过将活塞壳体650以所示方式(例如,逆时针)旋转以将活塞壳体从活塞组件的其余部分(例如,活塞销子组件)拧松而被打开。如上面描述的,可以使用螺纹联接布置结构,然而也可以使用其他联接实现方式(优选地为快速释放的实现方式),如受益于本公开的本领域普通技术人员将理解的。尽管螺纹联接可以消除活塞销子组件与活塞壳体之间的滑动,但是这可以得到更稳固的、低噪音的、低公差的实现方式。
84.图14a示出了根据某些实施方式的阻抑器替换过程的各方面。如图中所示,一旦活塞壳体650被移除,则可以移除旧的阻尼单元,并且可以安装新的阻尼单元。阻尼单元可以由任何适合的弹性体材料(例如,聚氨酯;闭孔聚氨酯,比如basfveithgetznergetzner泡沫、硅树脂材料、海绵等)或其他适合的材料构成。在一些实施方式中,除了弹性体阻抑器之外,还可以包括小的泡沫阻抑器。泡沫可以操作成为活塞组件540提供一定的预行程,这可以使用户更容易地预压缩活塞组件(例如,参见图12)以便使活塞组件与基础平台联接以及断开联接。在活塞壳体的内部使用弹性体还可以提供良好的用户体验。当阻抑器在施加力的情况下变形时,阻抑器接触活塞壳体的边缘,这可以进一步提供刚度并影响由阻尼单元提供的阻力特性。阻尼单元可以利用不同的密度和/或化合物制成以实现不同的阻力特性,每种阻力特性具有不同的变形范围。阻尼单元的组合可以用于实现期望的阻力特性。在一些示例性实施方式中,可以以任何适合的组合使用两个基于弹性体的阻尼单元和一个泡沫阻尼单元,如受益于本公开的本领域普通技术人员将理解的。图14b示出了根据某些实施方式的使用三阻尼单元构型——该三阻尼单元构型包括两个基于弹性体的阻尼单元1410、1420和一个泡沫阻尼单元1430——的活塞组件1400的分解图。
85.作为非限制性示例,在踏板上施加有35kg的力的情况下,各种阻尼单元的组合可以提供不同的踏板行程,根据某些实施方式,所述不同的踏板行程包括下述各者:对于极硬的情况,踏板行程为23mm;对于硬的情况,踏板行程为28mm;对于中等硬的情况,踏板行程为32mm;对于中等软的情况,踏板行程为38mm;对于软的情况,踏板行程为42mm、以及对于非常软的情况,踏板行程为48mm。阻尼单元的其他组合可以以不同方式影响该行程。受益于本公开的本领域普通技术人员将理解其许多改型、变型和替代实施方式。
86.图15示出了根据某些实施方式的阻抑器更换过程的各方面。一旦替换阻尼单元被安装,则活塞组件540可以通过将活塞壳体650以所示方式(例如,顺时针)旋转以将活塞壳体拧回至活塞销子组件而被封闭。在一些典型的实施方式中,当活塞组件540完全封闭(例如,活塞壳体650被完全拧住)时,横向销接口655应当定向成使得凸缘和u形部分应与横向销530b对准,如图15的右上方图像中所示。如果横向销接口655如图15的右下方图像中所示的那样未正确对准,则活塞组件540将不会与横向销530b恰当地配合(联接),因此在重新组装活塞组件540时应当小心。
87.现在参照图16,为了将偏置模块(例如,活塞组件650)联接回至基础平台510,用户可以用其拇指手动地推动踏板臂的前部部分(例如,参见步骤1的相应箭头)并且同时拉动活塞组件540(例如,在活塞帽上部620处拉动活塞组件540;参见步骤2的相应箭头),以在活
塞组件540上赋予强大到足以使得横向销接口655的凸缘可以移开并联接至横向销530b的压缩力。然后,用户可以放低活塞组件650(例如,参见步骤3的相应箭头;活塞组件540以位于锚定点524处的旋转轴线旋转,以允许活塞组件以图16中所示的方式被放低),使得活塞组件650与横向销530b对准。然后,拇指和手指可以将压缩力释放,使得活塞组件540被压缩配装回到横向销530b上。
88.图17示出了根据某些实施方式的加速器或离合器偏置机构替换过程的各方面。用于离合器或加速器的偏置机构替换过程除了包括弹簧组件而非如上面描述的基于弹性体的阻尼单元之外可以类似于如上面关于图12至图16描述的制动器组件的偏置机构替换过程。在一些实施方式中,不同类型的弹簧单元(也称为阻尼单元)可以被换出以获得不同的阻力特性。换言之,上面关于制动器踏板模块应用的快速更换方法可以以类似的方式但通过不同的偏置机构方案来应用,如受益于此公开的本领域的普通技术人员将理解的。
89.图18示出了根据某些实施方式的用于游戏踏板系统的横向销1800的各方面。横向销1800可以类似于如上面关于图5描述的横向销530b。除了设置了用以将活塞组件540的横向销接口655联接至基础平台510的适合的表面之外,横向销1800的外形被确定为包括用以对由用户施加在踏板模块上的力进行测量的应变仪。常规的游戏踏板系统设计经常使用应变仪,但通常将应变仪构造在极易接近的位置比如踏板臂的前部。然而,尽管具有相对较好的易接近性,但电线(例如,用以将应变仪传感器联接至处理器)通常需要穿过踏板臂,这除了因应变仪传感器的位置而造成对传感器精度和线性度的某些折中之外还可能随着时间推移导致电线的明显磨损、挤压或损坏,如受益于本公开的本领域的普通技术人员将理解的。相比之下,将应变仪安装在横向销1800的背部由于有限的空间和受阻的位置因而在安装上可能会更加困难和昂贵,然而,如在以下描述中将明显的,应变仪的测量可以明显更准确。
90.横向销1800可以包括圆形(筒形)部分1805和在相反侧上的平坦部分1820。基础平台510可以通过可以直通孔1830的销、转轴或其他结构(未示出)联接至横向销530b。根据某些实施方式,两个凹口1810a和1810b构造在圆形部分1805上并且相对于横向销1800的宽度的中心是等距的。如上面进一步描述的,圆形的筒形部分1805可以是横向销接口655以互补的配合布置结构联接至横向销530b(1800)的位置。平坦部分1820可以是用于一个或更多个应变仪的安装位置,所述一个或更多个应变仪可以配置成测量因由偏置模块和踏板臂施加在横向销上的力而引起的横向销的挠曲。即,当由用户向踏板施加力时,该力被传递至偏置模块(例如,活塞组件540)并被直接传递至横向销1800的背侧部(圆形的筒形部分1805)的中心。该力使横向销1800挠曲,该挠曲可以由构造在平坦部分1820上的应变仪测量。可以为横向销1800增加凹口1810a和1810b,以减小横向销1800的刚性并增大横向销1800的挠曲,该挠曲可以由应变仪传感器更容易且准确地测量。通常,凹口构造成相对于横向销1800的中心是对称的。在特定实施方式中,凹口可以为约4mm宽以及4.65mm深,然而其他尺寸也是可能的。此外,额外的凹口是可能的。然而,应当指出,太靠近中心的凹口可能导致横向销的中心部分变弱,并且变形可能散布在很长的区域内。距中心太远的切口也可能导致变形散布在很长的区域内。优选地,凹口构造成用于增大横向销的针对对应的应变仪上的大信号的变形(例如,在一些情况下为最大变形),然而,这通常是在良好的感测灵敏度与对横向销上的机械疲劳的高抵抗力之间的权衡,如受益于本公开的本领域的普通技术人员将理解
的。因此,与为了寿命(例如,更稳固的零部件)而构造的许多现代设计不同,本发明的各方面包含凹口,以进一步引起应变仪所处的销的挠曲,这实际上可能操作成由于因凹口引起的弱化状态而减少横向销的寿命。
91.图19a示出了根据某些实施方式的位于横向销1800上的应变仪传感器的构型。应变仪1950a和1950b可以被构造在横向销1800的平坦部分1820上。应变仪可以如图19b中所示的那样以桥形拓扑(bridge topology)构造。在一些方面,应变仪1950a和1950b可以定位成在横向销1800处相对于平坦部分1820的中心是等距的。应变仪传感器可以配置成测量因由活塞组件(或其他偏置模块)施加在横向销1800的筒形部分1805上的力而引起的横向销的挠曲。
92.图20示出了根据某些实施方式的用于在游戏踏板系统上处理应变仪数据的电路框图2000。电路框图2000包括主计算设备2010、一个或更多个处理器2020、制动器踏板模块2030、加速器踏板模块2040和离合器踏板模块2050。制动器踏板模块2030可以包括应变仪传感器阵列2035,并且加速器踏板模块2040和离合器踏板模块2050可以各自包括用以检测踏板偏转的霍尔传感器,如受益于本公开的本领域普通技术人员将理解的。处理器2020可以通过usb或其他有线或无线通信协议联接至主机计算机2010。应变仪传感器2035和霍尔传感器2045、2055可以通过有线或无线通信协议联接至处理器2020。电路框图2000的各方面可以对应于系统200。例如,处理器2020可以是系统200的处理器210。来自应变仪传感器2035和霍尔传感器2045、2055的输入信号可以是输入检测块250的一部分。受益于本公开的本领域普通技术人员将理解其许多改型、变型和替代实施方式。
93.在一些实施方式中,为了对横向销本身上的存储单元(例如,eeprom设备)进行校准,可以测量并记录两个值(例如,在组装期间),这两个值包括在踏板面上无载荷情况(例如,0kg)和在踏板面中心上有40kg载荷(或其他适合的载荷)。应当指出,“无载荷”可以包括因弹簧和/或阻抑器产生的预载荷从而得到一偏移值。在一些实施方式中,并且根据这两个值,机载固件(fw)可以计算测压元件或应变仪灵敏度,以便提供从0kg至180kg的超过12位的人机接口设备(hid)输出。偏移值可以在fw运行时被(连续地或定期地)重新评估。在其中用户更换了阻抑器/弹簧构型的某些情况下,偏移值可以被自动重新计算,但可能无法在40kg下执行新的校准,这可能导致读数的较小偏移。为了更好地估计偏移幅度,应当知道在线校准期间将使用哪个设定以及每个设定对横向销的预载荷是多少。因此,校准可以表征和优化每个踏板的特定测压元件(例如,应变仪)。通常,更换阻尼单元对于应变仪如何对载荷做出反应不会有明显影响。然而,预载荷可能发生变化,并且这可以通过上面描述的fw实现方式来自动补偿。在操作中,可以连续地(或以通常比每1ms一次更快的较高速率周期性地)对力进行测量。当力被测得为非常小(例如,比通常用户提供的力低得多)且非常稳定(例如,变化很小;比人可以提供的力更稳定)时,则可能的是,差异很可能来自于配置更改。这可以在每次启动过程时执行。
94.一些实施方式利用对于本领域技术人员而言会是熟悉的至少一种网络来支持使用多种商业上可用的协议中的任一协议进行通信,所述多种商业上可用的协议比如为tcp/ip、udp、osi、ftp、upnp、nfs、cifs等。网络例如可以是局域网、广域网、虚拟专用网、因特网、内联网、外联网、公共电话交换网、红外网、无线网及其任何组合。
95.在利用网络服务器作为操作服务器或安全服务器的实施方式中,网络服务器可以
运行各种服务器或中间层应用中的任一者,所述各种服务器或中间层应用包括http服务器、ftp服务器、cgi服务器、数据服务器、java服务器以及业务应用服务器。服务器还能够响应于来自用户设备的请求、比如通过执行一个或更多个应用来执行程序或脚本,所述一个或更多个应用可以被实施为以包括但不限于c、c#或c++的任何编程语言、或诸如perl、python或tcl的任何脚本语言及其组合编写的一个或更多个脚本或程序。服务器还可以包括数据库服务器,该数据库服务器包括但不限于能够从和商购的数据库服务器。
96.此类设备还可以包括计算机可读存储介质读取器、通信设备(例如,调制解调器、网卡(无线或有线网卡)、红外通信设备等)以及如上面描述的工作存储器。计算机可读存储介质读取器可以与非临时性计算机可读存储介质连接或配置成接收非临时性计算机可读存储介质,该非临时性计算机可读存储介质代表了远程的、本地的、固定的和/或可移动的存储设备以及用于临时地和/或更永久地包含、存储、传输和检索计算机可读信息的存储介质。该系统和各种设备通常还将包括多个软件应用、模块、服务或位于至少一个工作存储设备内的其他元件、包括操作系统和应用程序比如客户端应用程序或浏览器。应当理解,替代实施方式可以具有与上面描述的实施方式不同的许多变型。例如,也可以使用定制的硬件和/或可以以硬件、软件(包括便携式软件比如小应用程序)或硬件和软件两者实现特定的元件。此外,可以采用与诸如网络输入/输出设备的其他计算设备的连接。
97.本文中阐述了许多具体细节以提供对所要求保护的主题的透彻理解。然而,本领域技术人员将理解,可以在没有这些具体细节的情况下实践所要求保护的主题。在其他情况下,对本领域普通技术人员已知的方法、装置或系统没有详细描述,以免使所要求保护的主题模糊。所图示并描述的各种实施方式仅作为示例来提供以说明权利要求的各种特征。然而,关于任何给定实施方式所示出和描述的特征不必限于相关联的实施方式,并且可以与所示出和描述的其他实施方式一起使用或组合。此外,权利要求书不意在受任何一个示例实施方式的限制。
98.尽管已经关于本主题的特定实施方式对本主题进行了详细描述,但是应当理解,本领域技术人员在达到对前述内容的理解时可以容易地得出针对此类实施方式的替换、变型和等同方案。因此,应当理解,本公开出于示例而非限制的目的而呈现,并且对于本领域普通技术人员而言将明显的是,本公开不排除包括对本发明主题的此类修改、变化和/或添加。实际上,本文中描述的方法和系统可以以多种其他形式来体现;此外,在不脱离本公开的精神的情况下,可以以本文中描述的方法和系统的形式进行各种省略、替换和改变。所附权利要求及其等同物意在覆盖如将落入本公开的范围和精神内的此类形式或改型。
99.尽管本公开提供了某些示例实施方式和应用,但是对于本领域普通技术人员而言明显的是,包括不提供本文中所阐述的所有特征和优点的实施方式的其他实施方式也在本公开的范围内。因此,本公开的范围旨在仅通过参照所附权利要求来限定。
100.除非另有明确说明,否则应当理解的是,贯穿本说明书,利用比如“处理”、“估算”、“计算”、“确定”和“标识”等术语的讨论指代计算设备、比如一个或更多个计算机或类似的一个或多个电子计算设备的活动或过程,这些活动或过程对计算平台的存储器、寄存器或其他信息存储设备、传输设备或显示设备内的以物理电子的或磁性的量表示的数据进行操纵或转换。
101.本文中讨论的系统或多个系统不限于任何特定的硬件架构或配置。计算设备可以包括提供以一个或更多个输入为条件的结果的任何适合布置结构的部件。适合的计算设备包括基于多用途微处理器的计算机系统,该计算机系统访问下述存储的软件:该软件对从通用计算装置到实现本主题的一个或更多个实施方式的专用计算装置进行编程或配置。任何适合的编程、脚本或其他类型的语言或语言的组合可以用于在将用于对计算设备进行编程或配置的软件中实现本文中所包含的教示。
102.本文中公开的方法的实施方式可以在此类计算设备的操作中执行。上面示例中呈现的块的顺序可以更改——例如,可以将块重新排序、组合和/或分解成子块。某些块或过程可以被并行地执行。
103.除非另有明确说明或者在如所使用的上下文中以其他方式理解,否则本文中所使用的条件性语言比如其中,“能够”、“能”、“可能”、“可以”、“例如”等一般意在传达某些实施方式包括某些特征、元件和/或步骤而其他实施方式不包括某些特征、元件和/或步骤。因此,这种条件性语言一般不意在暗示特征、元件和/或步骤无论如何都是一个或更多个示例所必需的,或者不意在暗示一个或更多个示例无论有或没有作者输入或提示都必然包括用于确定这些特征、元件和/或步骤是否被包括于任何特定示例中或在任何特定示例中被执行的逻辑。
104.术语“包括”、“包括有”、“具有”等是同义词并且以开放式方式包括性地使用,并且不排除其他元件、特征、活动、操作等。同样地,术语“一些”、“某些”等是同义词并且以开放式方式使用。同样地,术语“或”以其包括性的含义使用(而不是以其排他性的含义使用),使得当例如用于与元件的列表联系时,术语“或”表示列表中的元件中的一个元件、一些元件或所有元件。本文中“适应于”或“配置成”的使用是以开放式和包括性的语言表示不排除适用于或配置成执行另外的任务或步骤的设备。另外,“基于”的使用意在是开放式和包括性的,因为“基于”一个或更多个所陈述的条件或值的过程、步骤、计算或其他行为在实践中可能基于所陈述的条件或值之外的其他条件或值。类似地,“至少部分地基于”的使用意在是开放式和包括性的,因为“至少部分地基于”一个或更多个所陈述的条件或值的过程、步骤、计算或其他行为在实践中可能基于所陈述的条件或值之外的其他条件或值。本文中包括的标题、列表和编号仅是为了便于解释而并不意在是限制性的。
105.上面描述的各种特征和过程可以彼此独立地使用或者可以以各种方式组合。所有可能的组合和子组合意在落入本公开的范围内。另外,某些方法或处理块在一些实施方式中可以省略。此外,本文中所描述的方法和过程不限于任何特定的顺序,并且与这些方法和过程相关的块或状态可以以适当的其他顺序执行。例如,所描述的块或状态可以以不同于具体公开的顺序来执行,或者多个块或状态可以被组合在单个块或状态中。示例块或状态可以串行地、并行地或以其他方式执行。块或状态可以被添加到所公开的示例或从所公开的示例移除。类似地,本文中描述的示例系统和部件可以以不同于所描述的方式构造。例如,相比于所公开的示例,元件可以被添加、移除或重新布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1