一种包裹人体肘关节的伴随转动装置的制作方法
[0001]
本实用新型涉及助力辅助器械领域,特别是涉及一种包裹人体肘关节的伴随转动装置。
背景技术:
[0002]
普通的柔性护肘能够给使用者提供压力,让避免使用者在运动过程中因用力过度而导致关节肿胀,同时也能够对肘关节的运动起到一定的限制作用,避免受伤部位再次受创。对于肘部肌肉性能下降的老人和患者,柔性护肘一般会配套助力机构共同使用。
[0003]
助力机构是通过在肘关节两侧放置转轴机构为肘关节运动提供扭力以实现助力的。为了保证助力机构的正常运动,转轴机构两侧的转轴中心需与肘关节的转动中心保持在同一条直线上。然而,柔性护肘并不能使转轴机构与肘关节之间保持准确的定位,导致转轴机构在肘关节运动时容易发生轴向运动,进而发生卡死,对使用者的肘关节运动造成阻碍。
技术实现要素:
[0004]
本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种不随肘关节运动发生轴向移位且结构简单的包裹人体肘关节的伴随转动装置。
[0005]
根据本实用新型实施例的包裹人体肘关节的伴随转动装置,包括护肘机构和至少一副助力机构,其中,护肘机构包括相互独立的小臂护具和大臂护具;各所述助力机构分别包括设置在小臂护具、大臂护具上的小臂连杆和大臂连杆;各所述小臂连杆均包括支撑部及与支撑部连接的弹力部,所述支撑部与弹力部位于同一直线上,同一副所述助力机构的大臂连杆与小臂连杆的支撑部通过连接轴铰接相连。
[0006]
根据本实用新型实施例的包裹人体肘关节的伴随转动装置,至少具备如下的有益效果:该包裹人体肘关节的伴随转动装置,其护肘机构包括相互独立的小臂护具和大臂护具,组成助力机构的小臂连杆和大臂连杆分别设在小臂护具及大臂护具上,整体结构简单;小臂连杆包含了支撑部及与支撑部连接的弹力部,支撑部与弹力部位于同一直线上,当手臂进行屈伸时,弹力部随之伸缩,从而抵消了护肘机构与手臂之间的轴向移动,提高了护肘机构与手臂间的连接稳定性,也避免小臂连杆与大臂连杆之间的相对运动发生卡死,确保了手臂屈伸运动的顺利进行;再者,同一助力机构的大臂连杆与支撑部通过连接轴铰接相连,单轴传动的形式不仅减小了传动连接部的尺寸,也利于减轻整体装置的重量,实现轻量化。
[0007]
根据本实用新型的一些实施例,所述弹力部为一端与支撑部的端部固定的弹性元件,所述弹性元件的另一端连接至小臂护具。
[0008]
根据本实用新型的一些实施例,所述小臂护具上设置有固定槽壳供弹性元件的端部插入固定。
[0009]
根据本实用新型的一些实施例,所述弹性元件为螺旋弹簧。
[0010]
根据本实用新型的一些实施例,所述支撑部呈直杆状,所述支撑部与弹力部连接的端部形成有凸台,所述凸台的横截面的外廓面积大于支撑部的横截面面积。
[0011]
根据本实用新型的一些实施例,所述小臂护具、大臂护具均为弧形包裹壳,各所述弧形包裹的两侧分别设置至少一对绑带卡轴,同一对的所述绑带卡轴之间连接有绑带,各所述绑带上分别安装有卡扣。
[0012]
根据本实用新型的一些实施例,各所述绑带均为弹性带。
[0013]
根据本实用新型的一些实施例,各所述弧形包裹壳的内侧表面分别铺设有软垫。
[0014]
根据本实用新型的一些实施例,各所述弧形包裹壳的中部分别开设至少一个通孔。
[0015]
根据本实用新型的一些实施例,所述护肘机构的制作材料为abs塑料,所述大臂连杆及支撑部的制作材料为铝合金。
附图说明
[0016]
下面结合附图对本实用新型作进一步说明:
[0017]
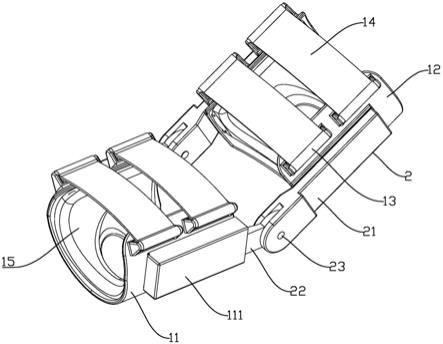
图1是本实用新型实施例包裹人体肘关节的伴随转动装置的整体结构示意图;
[0018]
图2是本实用新型实施例包裹人体肘关节的伴随转动装置的另一角度的整体结构示意图;
[0019]
图3是本实用新型实施例的小臂护具与小臂连杆的装配结构图。
具体实施方式
[0020]
本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
[0021]
在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0022]
在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0023]
本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
[0024]
参照图1至图3,本实用新型实施例的包裹人体肘关节的伴随转动装置,包括护肘机构和两副助力机构2。
[0025]
具体地,护肘机构包括相互独立的小臂护具11和大臂护具12;各助力机构2分别包括设置在小臂护具11、大臂护具12上的小臂连杆21和大臂连杆22;各小臂连杆21均具备支
撑部211及与支撑部211连接的弹力部212,其中,支撑部211与弹力部212位于同一直线上;且同一副助力机构2的大臂连杆22与小臂连杆21的支撑部211通过连接轴23铰接相连。
[0026]
根据本实用新型实施例的包裹人体肘关节的伴随转动装置,其护肘机构包括相互独立的小臂护具11和大臂护具12,组成助力机构2的小臂连杆21和大臂连杆22分别设在小臂护具11及大臂护具12上,整体结构简单;小臂连杆21包含了支撑部211及与支撑部211连接的弹力部212,支撑部211与弹力部212位于同一直线上,当手臂进行屈伸时,弹力部212随之伸缩,从而抵消了护肘机构与手臂之间的轴向移动,提高了护肘机构与手臂间的连接稳定性,也避免小臂连杆21与大臂连杆22之间的相对运动发生卡死,确保了手臂屈伸运动的顺利进行;再者,同一助力机构2的大臂连杆22与支撑部211通过连接轴23铰接相连,单轴传动的形式不仅减小了传动连接部的尺寸,也利于减轻整体装置的重量,实现轻量化。
[0027]
在本实用新型的一些实施例中,弹力部212为一端与支撑部211的端部固定的弹性元件,弹性元件的另一端连接至小臂护具11,如此在用户的手臂进行屈伸运动,并带动小臂护具11和大臂护具12绕连接轴23旋转时,弹性元件能随之发生收缩或者拉伸变形,从而抵消小臂护具11、大臂护具12与手臂表皮接触部位之间的轴向运动,使肘关节的转动中心与连接轴23的轴心始终保持在同一条直线上,从而确保助力机构2在运动过程中不发生卡死,提高手臂屈伸运动的顺畅程度。
[0028]
更为具体地,为了方便弹性元件与小臂护具11连接一端进行固定,也为了避免弹性元件的伸缩运动被外界环境所干扰,确保其伸缩运动的正常进行,本实用新型的具体实施例中,在小臂护具11上设置固定槽壳111供弹性元件的端部插入固定。
[0029]
参照图1、图2所示,小臂护具11、大臂护具12均为弧形包裹壳,各弧形包裹壳的横截面均呈u型,小臂护具11的两侧分别配置一个固定槽壳111,各固定槽壳111呈长条状并与小臂护具11的侧边相互平行。进一步地,各固定槽壳111的槽深均大于弹性元件的长度,弹性元件的端部连接至固定槽壳111的槽底,支撑部211的端部也插入固定槽壳111内与弹性元件相接;与此同时,为了确保支撑部211在固定槽壳111内能够顺利滑动而不受限制,固定槽壳111的槽孔的横截面面积大于支撑部211的横截面面积。具体地,本实施例中,如图3,弹性元件为螺旋弹簧,螺旋弹簧的两个自由端分别通过焊接或者其他固定方式与固定槽壳111、支撑部211进行连接;更优地,为了能够进一步减小该伴随转动装置的整体尺寸,提高整体刚度,可采用两个或者以上数量的弹性模量高的螺旋弹簧,如此可缩短所应用的螺旋弹簧的长度,以达到减小整体尺寸的效果。
[0030]
更为具体地,本实施例的支撑部211呈直杆状,且支撑部211与螺旋弹簧(即弹力部212)连接的端部形成有凸台2111;该凸台2111的横截面的外廓面积大于支撑部211的横截面面积,并小于固定槽壳111槽孔的横截面面积。如此,当螺旋弹簧与支撑部211的连接断裂,或者在多次伸缩过程中发生变形后,能对螺旋弹簧的活动范围进行限位,以更好地确保整体装置的正常使用。
[0031]
进一步地,为了提高护肘机构与手臂之间的定位稳固性,在小臂护具11、大臂护具12的两侧边处分别对称设置两对绑带卡轴13,同一对的绑带卡轴13之间连接有绑带14,且各绑带14上分别安装有卡扣,用户可根据自身手臂的尺寸,利用卡扣对绑带14的长度进行调节,以达到固定的目的。卡扣的设置,极大地提高了该伴随转动装置的通用性。而为了更好地提高用户的佩戴舒适性,减小绑带14对用户手臂所造成的压迫感,本实施例的各绑带
14均采用弹性带。
[0032]
在一些实施例中,各大臂连杆22、固定槽壳111分别通过紧固件固定在大臂护具12和小臂护具11的弧形包裹壳上。具体地,各弧形包裹壳上分别设有固定孔,大臂连杆22和固定槽壳111分别利用装配在各固定孔的螺丝与大臂护具12、小臂护具11的弧形包裹壳连接。进一步地,组成小臂护具11和大臂护具12的弧形包裹壳的内侧表面分别铺设有软垫15,且各软垫15的制作材质均为海绵。软垫15的铺设,不仅提高了各弧形包裹壳与大臂、小臂之间的贴合能力,也使装置的整体美观度得到提升。再者,软垫15还将在弧形包裹壳的固定孔中暴露的螺丝进行了覆盖,有效地防止螺丝因与外界环境过多接触而发生氧化,降低了部件的脱落风险,提高了整体装配结构的稳定性和可靠性。
[0033]
各弧形包裹壳的中部分别开设一个通孔16;各通孔16的边缘均作倒角处理,形成弧面。如此不仅让小臂护具11、大臂护具12在肘关节的屈伸旋转过程中更好地适应手臂肌肉线条的变化,也有利于减轻小臂护具11和大臂护具12的重量,实现整体装置的轻量化,提高用户使用时的舒适度。而在另一些实施例中,通孔16的数量可为两个或者两个以上,且通孔16的大小可根据实际情况而定。
[0034]
在本实用新型的一些实施例中,护肘机构的制作材料为abs塑料,abs塑料的质量轻,无毒无味,利用其所制作的产品具有轻便与安全的特性,故而在保证护肘机构结构稳定性的同时,能够减轻对人体手臂和手肘的负担。再者,abs塑料具有优良的力学性能,其缺口冲击强度高达20kj/m
2
,抗冲击性好,且其耐磨性优良,尺寸稳定性好,在长时间使用后仍能保持较高的力学性能;在相同质量条件下,abs塑料的比强度比45钢的比强度更大,是一般塑料强度的3~5倍。同时,它的吸湿性差、热变形温度高,不但能够在体表的高湿度环境下稳定存在,还能在日常生活中常见的体表温度及环境温度下保持形态稳定。abs塑料作为丙烯腈、丁二烯和苯乙烯的三元共聚物,将丙烯腈、丁二烯和苯乙烯的各种性能有机地统一起来,兼具韧,硬,刚相均衡的优良力学性能,具有优良的综合物理性能,能胜任护具中冲击力大,应力大的使用环境,而且其力学热学性能在常见环境中稳定保持。
[0035]
与此同时,为了提高该伴随转动装置的抗腐蚀能力,大臂连杆22及支撑部211的制作材料为铝合金。进一步地,本实施例中的大臂连杆22和支撑部211的制作材料为6061铝合金;6061铝合金中镁、硅的含量多,具有加工性能极佳、韧性优良的特点,且其抗拉强度高达205mpa,数值上接近45钢的抗拉强度235mpa,但密度只有2.75g/cm
3
,是45钢的三分之一,比强度高,适合日常环境使用。
[0036]
当然,本实用新型的设计创造并不局限于上述实施方式,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出等同变形或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1