竞赛机器人小车的制作方法
竞赛机器人小车
【技术领域】
[0001]
本实用新型涉及到机器人技术领域,特别涉及一种竞赛机器人小车。
背景技术:
[0002]
竞赛机器人被公认的起源是1994年在旧金山举办的第一届美国机器人大擂台(robot wars us),由于首次举办的原因,这一赛事的场地非常简朴,而且规则也相对简单,分为轻量级、中量级和重量级三个级别,这场比赛也为之后竞赛机器人的发展奠定了基础。
[0003]
竞赛机器人主要有轮式竞赛机器人小车和履带式竞赛机器人小车两种,履带式竞赛机器人小车虽然可以适应各种地形,但由于比赛的擂台都是平面,且履带式竞赛机器人小车行动缓慢,灵活性较差,因此轮式竞赛机器人小车渐渐成为大多数爱好者的首选。
[0004]
现有的轮式竞赛机器人小车大多为四轮驱动,以四轮相连的对角线的交点为旋转中心进行转弯,四个轮子相对地面会产生较大的摩擦力,轮式竞赛机器人小车在转弯时需克服较大的摩擦力,因此其灵活性相对较低,在格斗竞赛过程中会出现转弯半径小且转弯不灵活的情况。
[0005]
随着科技的进步,竞赛机器人也逐步从手动控制转变成自动化控制。现有的竞赛机器人通过在盖板外部安装传感装置识别“敌人”,由于传感装置的安装相对固定,在侦查时存在死角,若“敌人”忽然从死角攻击,在事先没有防备的情况下,会给竞赛机器人造成毁灭性的打击,而且传感装置安装于盖板外部,在竞赛过程中很可能造成损坏或脱落,出现无法识别“敌人”的情况。
[0006]
因此,总体来说,现在的竞赛机器人还存在很大问题,亟须人们在此基础上继续创新研发,克服这些技术难题。
技术实现要素:
[0007]
为克服现有竞赛机器人小车灵活性较差,监测范围有限的技术难题,本实用新型提供了一种灵活性高、监测范围全面的竞赛机器人小车。
[0008]
本实用新型解决技术问题的方案是提供一种竞赛机器人小车,包括车身和车轮,所述车轮的数量为两个且对称设于所述车身的两侧,当竞赛机器人小车左转时,左侧车轮静止或反转,右侧车轮正转,当竞赛机器人小车右转时,左侧车轮正转,右侧车轮静止或反转;所述车身包括底板、第一传感器和第二传感器;所述第一传感器设于底板前进方向(竞赛机器人小车直线行驶时的正前方)的一端,第一传感器的感应方向为前进方向;所述第二传感器设于底板上第一传感器所在端的端角处,第二传感器的感应方向为与前进方向的夹角呈30
°
-60
°
的方向。
[0009]
优选地,所述车身进一步包括盖板、第三传感器和第一电机;所述盖板设于底板上;所述第三传感器设于底板上车轮所在的两侧;所述第一电机设于盖板内,所述第一电机的转轴贯穿盖板与第三传感器连接,带动第三传感器在盖板上水平转动,转动范围为与前进方向的夹角呈60
°-
180
°
的区域范围。
[0010]
优选地,所述车身进一步包括设于底板及盖板前进方向一端的保护罩,所述保护罩设于第一传感器、第二传感器及第三传感器的外侧,保护第一传感器、第二传感器及第三传感器不受光线的干扰以及不会在竞赛过程中被攻击。
[0011]
优选地,所述车身进一步包括铲板和弹力架;所述铲板设于底板前进方向一端;所述弹力架包括弹片、转动轴、第二电机和齿轮组;所述转动轴贯穿保护罩;所述弹片设于转动轴两端;所述齿轮组包括大齿轮和小齿轮;所述大齿轮和小齿轮啮合传动,大齿轮套设于转动轴上,小齿轮套设于第二电机的转轴上,第二电机带动转动轴转动从而使弹片旋转,将竞赛机器人小车弹射至擂台以及向对手进攻。
[0012]
优选地,所述竞赛机器人小车进一步包括控制装置、电源装置和驱动装置;所述控制装置设于盖板上;所述电源装置和驱动装置设于底板上;所述电源装置与控制装置电连接,为控制装置供电;所述控制装置分别与驱动装置和传感装置电连接,控制装置向驱动装置和传感装置发出相应的信号。
[0013]
优选地,所述控制装置包括微处理器和时钟电路,所述微处理器和时钟电路电连接;所述时钟电路为12mhz的石英晶振;和/或所述微处理器为stm32系列单片机或stc52系列单片机中的任一种。
[0014]
优选地,所述电源装置包括buck/boost电路、稳压电路和蓄电池;所述buck/boost电路的输入端外部与充电线连接,buck/boost电路调节输出电压以满足各装置所需电压;buck/boost电路、稳压电路、蓄电池依次电连接;所述稳压电路为二阶无源滤波电路,稳压电路稳定蓄电池的输出电压。
[0015]
优选地,所述驱动装置为型号24v800r的电机。
[0016]
优选地,所述第一传感器、第二传感器及第三传感器均为型号gp2y0a02的红外测距传感器。
[0017]
优选地,所述底板、盖板、保护罩的材料均为f4r玻璃纤维板或不锈钢中的任一种。
[0018]
与现有技术相比,本实用新型的竞赛机器人小车将车轮数量减少为两个,通过左右车轮的正反转使小车灵活转弯,快速躲避对手的攻击;第一传感器监测小车的前进方向,第二传感器监测小车的侧前方,第一传感器与第二传感器结合对小车的前方及侧前方进行全方位监控,避免小车从擂台掉落,同时减少被对手袭击、撞击到障碍物等情况发生。
[0019]
本实用新型的第三传感器在第一电机的带动下在盖板上水平往复转动,转动范围为与前进方向的夹角呈60
°-
180
°
,监测范围为从小车的正后方至与前进方向呈60
°
的斜前方,第三传感器、第一传感器及第二传感器一起对小车全方位、无死角监控,可及时躲避对手从侧方或后方的突然袭击。
[0020]
本实用新型的保护罩设于第一传感器、第二传感器及第三传感器的外侧,一方面可以避光,另一方面保护第一传感器、第二传感器及第三传感器不会被攻击而失去传感能力。小车行驶时,铲板贴地,在与对手正面冲撞时可将对手铲翻使其失去攻击能力;弹力架的第二电机通过齿轮组带动转动轴转动,转动轴进一步带动弹片旋转,在比赛开始前,可通过小车弹力架旋转像上台阶一样支撑小车登上擂台,比赛过程中也可通过弹片往复转动对对手进行打击,增加小车战斗力。
[0021]
本实用新型的电源装置和驱动装置设于盖板内部,避免在竞赛中受到对手攻击而损坏,一定程度上减少了成本的浪费,控制装置设于盖板上,使用者下载及更改代码时更加
便捷,不需要打开盖板或底板即可对小车进行编程设置。
[0022]
控制装置中的时钟电路采用12mhz的石英晶振,可对控制装置精确定时;微处理器采用stm32系列单片机或stc52系列单片机芯片,实现控制装置对驱动装置、传感装置、第一电机、第二电机的控制功能。电源装置中的buck/boost电路调节蓄电池的输出电压以满足各装置及元件所需的电压,从而实现各装置稳定工作;稳压电路为二阶无源滤波电路,可稳定蓄电池的输出电压,使整个电路传输稳定。驱动装置采用24v800r的电机,可带动车轮灵活运转,结构小巧精致,工作稳定。
[0023]
本实用新型的底板、盖板及保护罩的材料均采用f4r玻璃纤维板或不锈钢,这两种材料硬度较高且具有一定韧性,可使小车在竞赛中更加耐磨,不易损坏。
【附图说明】
[0024]
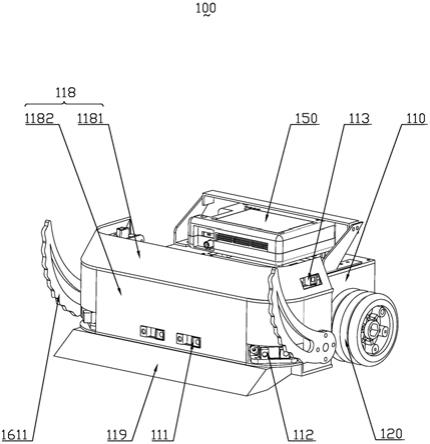
图1是本实用新型竞赛机器人小车的结构示意图。
[0025]
图2是本实用新型竞赛机器人小车的爆炸结构示意图。
[0026]
附图标记:100、竞赛机器人小车;110、车身;120、车轮;130、电源装置;140、驱动装置;150、控制装置;111、第一传感器;112、第二传感器;113、第三传感器;114、第一电机;115、底板;116、盖板;117、端板;118、保护罩;119、铲板;161、弹力架;1181、第一罩体;1182、第二罩体;1611、弹片;1612、转动轴;1613、轴承座;1614、第二电机;1615、齿轮组;16151大齿轮;16152、小齿轮。
【具体实施方式】
[0027]
为了使本实用新型的目的,技术方案及优点更加清楚明白,以下结合附图及实施实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0028]
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
[0029]
如图1所示,本实用新型的竞赛机器人小车100包括车身110和车轮120,所述车轮120的数量为两个且对应设于车身110的两侧,两个所述车轮120的设计使小车在转弯时灵活快速,且所述竞赛机器人小车100的整体体积更小,从而可利于躲避敌人的攻击。
[0030]
结合图1及图2中所示,所述车身110包括底板115、设于底板115上的盖板116、设于底板115一端的保护罩118、设于底板115另一端的端板117及设于所述底板115上保护罩118所在的一端的铲板119;所述盖板116、底板115、保护罩118及端板117内部形成容置腔(图为示),可放置元器件,所述保护罩118保护内部结构在竞赛时不受到破坏;所述竞赛机器人小车100在与对手正面碰撞时,所述铲板119可将对手铲翻。
[0031]
继续如图1中所示,所述车身110进一步包括第一传感器111、第二传感器112、第三传感器113、第一电机114;所述第一传感器111设于底板115沿前进方向的一端,用于监测正前方的“敌人”,可以理解的是,在具体地实施例中,第一传感器111可为一个或多个;所述第二传感器112设于底板上第一传感器111所在端的两端角处,在本实施例中,所述第二传感
器112的监测方向与前进方向的夹角呈45
°
设置,在其他实施例中,所述夹角可呈30
°-
60
°
范围内任一角度设置;所述第三传感器113设于盖板116上车轮120所在的两侧,所述第一电机114挂设于盖板116内,第一电机114的转轴贯穿盖板116与第三传感器113连接,带动第三传感器113在盖板116上水平转动,转动范围为与前进方向的夹角呈60
°-
180
°
,监测方向的范围为从与前进方向相反的方向至与前进方向呈60
°
、远离车身110的方向,在竞赛过程中第三传感器113在盖板116上往复转动,实现全方位的监测。
[0032]
如图2中所示,所述车身110进一步包括弹力架161,所述弹力架161包括弹片1611、转动轴1612、轴承座1613、第二电机1614及齿轮组1615;所述弹片1611设于转动轴1612轴向的两端;所述轴承座1613设于底板115上,所述转动轴1612与轴承座1613贯穿连接,所述轴承座1613承接转动轴1612并使转动轴1612可沿轴心转动,所述转动轴1612还贯穿于保护罩118;所述齿轮组1615包括大齿轮16151和小齿轮16152,所述大齿轮16151和小齿轮16152啮合传动,进一步地,所述大齿轮16151与转动轴1612配合连接,所述小齿轮16152与第二电机1614的转轴配合连接,第二电机1614经齿轮组1615传动带动转动轴1612转动,在具体地使用过程中,第二电机1614持续正转实现弹片1611对竞赛机器人小车100的弹射,第二电机1614正反往复转动实现弹片1611对“敌人”发起攻击。
[0033]
结合图1及图2中所示,所述竞赛机器人小车100进一步包括电源装置130、驱动装置140及控制装置150,所述电源装置130和驱动装置140设于底板115上,所述控制装置150设于盖板116上,所述电源装置130与控制装置150电连接,为控制装置150供电,所述控制装置150分别与驱动装置140、第一传感器111、第二传感器112、第三传感器113、第一电机114、第二电机1614电连接,各传感器将感应后的信号发送至控制装置150,控制装置150进一步发出相应的信号至驱动装置140及各电机,实现竞赛机器人小车100的自动化控制。
[0034]
如图2中所示,所述保护罩118包括设于盖板116沿前进方向一端的第一罩体1181和设于底板115沿前进方向一端的第二罩体1182,所述第二罩体1182和第一罩体1181之间通过盖板116抵接,所述第三传感器113设于第一罩体1181内侧,第一罩体1181对第三传感器113进行保护,所述第一传感器111及第二传感器112设于第二罩体1182内侧,第二罩体1182保护第一传感器111和第二传感器112不受到攻击。
[0035]
在本实用新型中,所述控制装置150包括微处理器(图未示)和时钟电路(图未示),所述微处理器和时钟电路电连接;所述时钟电路为12mhz的石英晶振,使控制装置150可精确定时;所述微处理器为stm32系列单片机,stm32单片机具有高性能、低成本及低功耗的优点,可以理解,在其他实施例中,也可为stc52单片机。
[0036]
所述电源装置130包括buck/boost电路(图未示)、稳压电路(图未示)和蓄电池(图未示);所述buck/boost电路的输入端外部与充电线连接,可对蓄电池进行充电,buck/boost电路调节输出电压以满足各装置所需电压;其中,buck/boost电路、稳压电路、蓄电池依次电连接;所述稳压电路为二阶无源滤波电路,可稳定蓄电池的输出电压。
[0037]
所述驱动装置140为型号24v800r的电机,可带动车轮120灵活运转,结构小巧精致,工作稳定。
[0038]
所述底板115、盖板116、端板117、保护罩118、铲板119的材料均采用f4r玻璃纤维板,f4r玻璃纤维板具有硬度高且不脆的特点,在竞赛过程中具有一定的耐磨性和抗打击能力,可以理解,在其他实施例中,也可为不锈钢材料。
[0039]
与现有技术相比,本实用新型的竞赛机器人小车将车轮数量减少为两个,通过左右车轮的正反转使小车灵活转弯,快速躲避对手的攻击;第一传感器监测小车的前进方向,第二传感器监测小车的侧前方,第一传感器与第二传感器结合对小车的前方及侧前方进行全方位监控,避免小车从擂台掉落、被对手袭击、撞击到障碍物等情况发生。
[0040]
本实用新型的第三传感器在第一电机的带动下在盖板上水平往复转动,转动范围为与前进方向的夹角呈60
°-
180
°
,监测范围为从小车的正后方至与前进方向呈60
°
的斜前方,第三传感器、第一传感器及第二传感器配合使用可对小车进行全方位、无死角监控,从而可及时躲避对手从侧方或后方的突然袭击。
[0041]
本实用新型的保护罩设于第一传感器、第二传感器及第三传感器的外侧,一方面可以避光,另一方面保护第一传感器、第二传感器及第三传感器不会被攻击而失去传感能力。小车行驶时,铲板贴地,在与对手正面冲撞时可将对手铲翻使其失去攻击能力;弹力架的第二电机通过齿轮组带动转动轴转动,转动轴进一步带动弹片旋转,在比赛中开始前,可通过弹力架将小车弹射至擂台上,比赛过程中也可通过弹片往复转动对对手进行打击,增加小车战斗力。
[0042]
本实用新型的电源装置和驱动装置设于盖板内部,避免在竞赛中受到对手攻击而损坏,一定程度上减少了成本的浪费,控制装置设于盖板上,使用者下载及更改代码时更加便捷,不需要打开盖板或底板即可对小车进行编程设置。
[0043]
所述控制装置中的时钟电路采用12mhz的石英晶振,可对控制装置精确定时;微处理器采用stm32系列单片机或stc52系列单片机芯片,实现控制装置对各装置的控制功能。电源装置中的buck/boost电路调节蓄电池的输出电压以满足各装置及元件所需的电压,从而实现各装置稳定工作;稳压电路为二阶无源滤波电路,可稳定蓄电池的输出电压,使整个电路传输稳定。驱动装置采用24v800r的电机,可带动车轮灵活运转,结构小巧精致,工作稳定。
[0044]
本实用新型的底板、盖板及保护罩的材料均采用f4r玻璃纤维板或不锈钢,这两种材料硬较度高且不脆,可使小车在竞赛中更加耐磨,不易损坏。
[0045]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的原则之内所作的任何修改,等同替换和改进等均应包含本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1