用于游乐景点的阻力控制系统和方法与流程
用于游乐景点的阻力控制系统和方法
1.对相关申请的交叉引用本技术是于2019年11月18日提交的、并且名称为“用于游乐景点的阻力控制系统和方法”的第16/687,354号美国申请的部分继续,该申请要求于2019年8月21日提交的、并且名称为“用于游乐景点的阻力控制系统和方法”的美国临时申请序列号62/889,943的权益,所有这些申请均由此以其整体通过引用方式并入以用于所有目的。
背景技术:
2.本节旨在向读者介绍可能与下文描述和/或要求保护的本技术的各个方面相关的技术的各个方面。此讨论被认为有助于向读者提供背景信息以促进更好地理解本公开的各个方面。因此,应理解,这些陈述应从这种角度来阅读,而不是作为对现有技术的承认。
3.各种游乐景点已经被创造,以为乘坐者提供独特的运动和视觉体验。在一些情况下,游乐景点可包括乘坐运载器和乘坐运载器沿其移动的乘坐轨道(或其他路径)。在增加的数量的游乐景点中,乘坐运载器可以不横越路径。例如,运载器可以配置成在保持固定到一位置时滚动、俯仰和/或横摆。这样的运载器可称为静止运载器。对于静止运载器和横越路径的那些运载器两者,虚拟现实(vr)设备被用来提供附加的刺激。现在认识到,希望的是为乘坐者提供能力以控制这些乘坐设施和/或相关联的vr体验的某些方面,以增加乘坐体验中的刺激和沉浸感。例如,现在认识到,希望的是向用户提供能力以操纵乘坐运载器,或者至少经由vr设备给出他们正在操纵乘坐运载器的感觉。
技术实现要素:
4.在范围上与原始要求保护的主题相称的某些实施例概述如下。这些实施例不旨在限制本公开的范围,而是这些实施例旨在仅提供某些公开的实施例的简要概述。实际上,本公开可以涵盖可以与下面阐述的实施例类似或不同的各种形式。
5.本实施例针对一种用于游乐景点的乘客支撑件的阻力控制系统,该系统包括第一基座、第二基座和在第一基座和第二基座之间延伸的支撑件。第二基座在枢转接头处枢转地耦合到支撑件。阻力控制系统还包括马达和耦合到马达且耦合到第二基座的连杆系统,使得马达配置成输出扭矩,以经由连杆系统调节第二基座绕枢转接头以及相对于第一基座的移动的阻力。
6.本实施例针对一种用于游乐景点的乘坐运载器的阻力控制系统,该系统包括:第一基座;耦合到枢转接头并配置成经由枢转接头相对于第一基座移动的第二基座;配置成经由连杆系统驱动第二基座的移动的马达;以及通信地耦合到马达的控制器。控制器配置成接收输入,并配置成基于输入指导马达输出扭矩,以调节第二基座绕枢转接头以及相对于第一基座的移动的阻力。
7.本实施例针对一种游乐景点,该游乐景点包括虚拟现实(vr)设备,该虚拟现实(vr)设备具有vr控制器,该vr控制器配置成指导vr设备呈现图像;以及乘坐运载器,该乘坐运载器具有第一基座、第二基座和在第一基座和第二基座之间延伸的支撑件。支撑件经由
枢转接头枢转地耦合到第二基座,使得第二基座配置成经由枢转接头相对于第一基座移动。乘坐运载器还包括马达,马达配置成经由枢转接头或耦合到第二基座的连杆系统驱动第二基座相对于第一基座的运动。游乐景点进一步包括通信地耦合到vr控制器并耦合到马达的运载器控制器。运载器控制器配置成基于运载器控制器和vr控制器之间的通信来指导马达输出扭矩。
附图说明
8.当参考附图而阅读以下的详述时,本公开的这些及其他特征、方面以及优点将变得更好理解,在附图中,贯穿附图,相同的字符表示相同的部分,其中:图1是示出根据本公开的实施例的具有阻力控制系统和静止乘坐运载器以用于增强配备有虚拟现实(vr)设备的乘坐者的体验的游乐景点的实施例的示意图;图2是根据本公开的实施例的过程的实施例的流程图,阻力控制系统可通过该过程调节图1的静止乘坐运载器的阻力;图3是根据本公开的实施例的图1的静止乘坐运载器的实施例的横截面正视图;图4是根据本公开的实施例的在倾侧方位中的图3的静止乘坐运载器的实施例的侧部透视图;图5是根据本公开的实施例的具有复合弹簧的静止乘坐运载器的另一实施例的示意性透视图;图6是根据本公开的实施例的图5的静止乘坐运载器的复合弹簧柱的实施例的示意图;图7是根据本公开的实施例的具有马达的图1的静止乘坐运载器的另一实施例的透视图;图8是根据本公开的实施例的具有马达的图1的静止乘坐运载器的另一实施例的透视图;以及图9是根据本公开的实施例的过程的实施例的流程图,阻力控制系统可以通过该过程经由马达调节图1的静止乘坐运载器的操作。
具体实施方式
9.下面将描述本公开的一个或多个具体实施例。为了提供这些实施例的简明描述,可以不在本说明书中描述实际实施方式的所有特征。应当意识到,在任何这样的实际实施方式的开发中,如在任何工程或设计项目中,必须作出许多特定于实施方式的决策以实现开发者的具体目标,诸如对与系统相关的和与商业相关的约束条件的依从,其可因实施方式的不同而变化。此外,应当意识到,这样的开发努力可能复杂并且耗时,但对于得益于本公开的普通技术人员而言,将仍然是设计、制作以及制造的常规任务。
10.当介绍本公开的各种实施例的元素时,冠词“一”、“一个”以及“该”旨在意指存在一个或多个元素。术语“包含”、“包括”以及“具有”旨在为包括性的,并且意指可能存在除了所列出的元素之外的附加元素。此外,应理解,对本公开的“一个实施例
”ꢀ
或“一实施例”的引用不旨在被解释为排除也并入所叙述的特征的附加实施例的存在。
11.本实施例针对用于游乐景点的阻力控制系统,诸如其中乘坐者配备有vr系统的虚
拟现实(vr)设备的景点。通常,乘坐者通过相对于定位在乘坐者下方的乘坐运载器倾斜或转移他或她的重量来向静止景点的vr系统提供输入。所述乘坐运载器包括支撑件,所述支撑件被张紧、接合、或以其他方式传力以适当地抵抗移动以模拟通过vr设备传递的诸如骑马或操纵滑翔伞的虚拟体验。如本文中所讨论的,阻力控制系统使能够选择性地调节乘坐运载器对移动的阻力,从而例如为具有不同重量的人提供特定的(例如,类似的)体验和/或使得宽范围的乘坐者偏好或因素能够被容纳在静止景点上。
12.阻力控制系统的乘坐运载器通常包括耦合到弹簧板的诸如椅子或座椅的乘坐者容纳设施。在某些实施例中,弹簧板由结构接头(例如,万向接头)支撑,该结构接头使乘坐者能够利用其体重使弹簧板俯仰和滚动。值得注意的是,弹簧与弹簧板的表面接合或耦合到弹簧板的表面,以选择性地接触设置在弹簧板下方的致动器板。所述致动器板经由致动器相对于弹簧板竖直定位,从而使得弹簧板的弹簧能够压缩并在弹簧板的俯仰和滚动运动期间提供稳定性。致动器可以向上或向下移动致动器板,以相应增加或减小阻力控制系统对乘坐者的移动的阻力。因此,在正常的乘坐循环期间,阻力控制系统可以测量乘坐者的重量或其他参数并指导致动器相应地将弹簧的张力改变到预定设置或有效弹簧常数。在其他实施例中,耦合到弹簧板的复合弹簧或锥形弹簧可以被乘坐者被动地压缩到目标高度并用棘轮设备固定,从而提供对乘坐者的移动的目标阻力。
13.在进一步的实施例中,阻力控制系统可以经由马达的控制提供移动的阻力。例如,马达可经由连杆耦合到弹簧板,且马达可配置成将扭矩传到弹簧板上以增加弹簧板的移动的阻力(例如,相对于致动器板)。此外,马达可以通过由使用者诸如经由其体重传到弹簧板上的力而反向驱动,以便使使用者能够移动(例如,俯仰和滚动)弹簧板。因此,马达可以增加或减小输出扭矩,以便分别增加或减小弹簧板的移动的阻力。例如,阻力控制系统可以基于用户的体重和/或偏好来调节扭矩输出,以改变弹簧板的移动的阻力。此外,阻力控制系统可致使马达输出主动驱动弹簧板的移动的扭矩。在任何情况下,与完全被动的系统和/或完全主动的系统的体验相比,阻力控制系统为客人提供改进的体验。
14.如图1中所示,游乐景点10包括阻力控制系统12,该阻力控制系统具有运载器控制器14(例如,控制器)和乘坐运载器16(例如,运动模拟器)。游乐景点10的本实施例示出了具有座椅20的乘坐运载器16,乘坐者22可从座椅20操纵乘坐运载器16并接收虚拟体验,该虚拟体验由具有vr控制器26的vr设备24(例如,vr头戴式设备、可穿戴可视化设备)支持。在其他实施例中,不包括vr设备24,并且由阻力控制系统12添加附加的刺激,而不具有vr效果。应理解,乘坐运载器16可以采取任何合适的形式,诸如包括雪橇、摩托车、动物、冲浪板、滑板等的形式。尽管本文中参考单个乘坐者22来讨论阻力控制系统12,但应理解,可以应用类似的技术来将阻力控制系统12适配于多乘客乘坐运载器。
15.在本实施例中,座椅20耦合到乘坐运载器16的弹簧板32的顶表面30,并且弹簧34与弹簧板32的底表面36接合或耦合到弹簧板32的底表面36。应当注意,在其他实施例中,弹簧板32可以是框架或框架结构并且不是实心板。此外,应当注意,诸如马达和/或连杆(例如,连杆系统)的其他特征或部件可用于提供弹簧板32相对于乘坐运载器16的其余部分的移动的阻力。在本实施例中,乘坐运载器16包括基体40,基体40经由撑杆44耦合到支撑梁42。支撑梁42还经由枢转接头46耦合到弹簧板32的底表面36。本实施例的枢转接头46使弹簧板32能够经由滚动50和俯仰52而相对于基体40旋转。在所示实施例中,基体40相对于地
面54通常是静止的。然而,在其他实施例中,基体40可以是横越路径(例如,轨道)的更大的运载器的部分。在一些实施例中,枢转接头46可以是球形轴承接头或万向接头,其还实现弹簧板32绕平行于竖直轴线72的轴线的旋转移动56(例如,横摆移动)。在其他实施例中,枢转接头46可实现沿单个轴线的移动(例如,对应于单自由度),这可适用于简化的游乐景点10。例如,为了提供围绕单个轴线的旋转,枢转接头46可以是万向节(gimbal)或铰接的万向节膨胀接头。在任何情况下,基体40、支撑梁42和枢转接头46通常形成支撑组件60,其支撑弹簧板32,同时允许弹簧板32的任意合适的自由度的枢转移动。
16.由乘坐者22佩戴的vr设备24实施vr技术以在乘坐者22的视野内呈现交互式虚拟体验。例如,vr控制器26可经由处理器62和存储器64指导vr设备24的显示器生成与交互式虚拟体验相对应的虚拟图像的目标集。在一些实施例中,vr技术还包括增强现实技术。如所示的,vr设备24的vr控制器26经由无线通信部件66通信地耦合到运载器控制器14。在其他实施例中,vr控制器26可经由形成通信连接(诸如有线连接、蓝牙
®
连接、wi-fi连接等)的任何合适部件通信地耦合到运载器控制器14。应理解,在一些实施例中,通过vr设备24提供的虚拟体验可被选择为与乘坐运载器16的物理外观和/或游乐景点10的主题相对应。例如,在其中游乐景点10以丛林为主题的实施例中,乘坐运载器16的座椅20可以设计为动物,并且虚拟体验可以向乘坐者22显示为通过丛林的赛跑。游乐景点10的部件的这样的结合设计可以向乘坐者22提供一致的和沉浸式的体验。在其他实施例中,vr设备24可以用增强现实设备替代。此外,应理解,阻力控制系统12可以在其中半被动阻力控制框架结构增强用户体验的任何合适环境(例如,交互式电影院或基于运动的乘坐设施)中实施。
17.更详细地注意阻力控制系统12的阻力调节特征,乘坐运载器16包括相对于竖直轴线72定位在弹簧板32和基体40之间的致动器板70。如同弹簧板32,致动器板70可以是框架结构,并且不必需包括实心板。在本实施例中,致动器74耦合在致动器板70和基体40之间,以基于来自运载器控制器14的指令来调节致动器板70的位置。换句话说,致动器74被指导成收缩或延伸到在完全收缩长度和完全延伸长度之间的任何合适的致动器长度,以将致动器板70定位在距弹簧板32的特定分离距离76处。致动器74可以是促进致动器板70移动的任何合适部件,包括电动致动器、液压致动器、气动致动器、磁性致动器、机械致动器和/或伺服马达等。应理解,在本实施例中,致动器板70不直接耦合到弹簧板32。
18.如所提到的,弹簧34耦合到弹簧板32的底表面36,并且进一步,响应于乘坐者22的移动,弹簧34可选择性地抵靠接触致动器板70压缩。例如,当乘坐者22倾斜以相对于支撑梁42转移他或她的重量时,枢转接头46使弹簧板32相应倾侧,从而将弹簧34的对应部分设置为与致动器板70的顶表面80接触(例如,接合)。响应于持续的重量转移或接合,与顶表面80接触的弹簧34的部分压缩并提供阻力以减缓并最终停止弹簧板32的移动。如本文中认识到的,通过调整弹簧板32和致动器板70之间的分离距离76,阻力控制系统12可以有效地调整乘坐运载器16,以向乘坐者22提供适合于由vr设备24传递的多个vr体验中的任何一个的中性悬浮的感觉。
19.此外,尽管为了简单起见示出了两个弹簧34和两个致动器74,但应理解,这些代表了任意数量的这样的特征。根据本实施例,任何合适数量的弹簧34和致动器74可包括在乘坐运载器16中,包括一个弹簧34和/或一个致动器74。例如,根据本技术,在具有单个致动器74的实施例中,单个致动器可以包括任何合适的四杆连杆(linkage)、剪式连杆、与轮子组
合的导轨、或使得单个致动器74能够在一个或多个维度上调节致动器板70的位置的任何其他合适的连杆机构。此外,在具有单个弹簧34的实施例中,单个弹簧34可以设置在对应于乘坐者22的预期的质量中心的中心位置处。还应理解,在本实施例中示出为机械、螺旋或盘绕弹簧的弹簧34可包括或表示某些实施例中的任何合适的阻力设备,诸如气体弹簧、空气弹簧、弹性体、板簧、刚性气囊、锥形弹簧衬垫(例如,贝式衬垫)、气体撑杆或磁性排斥组件,或其任何组合。即,将可变力作为合适的设备的尺寸的函数施加的任何合适的设备目前被设想为阻力控制系统12的合适的部件。
20.此外,尽管示出有从致动器板70分离的弹簧板32的弹簧34,但在其他实施例中,弹簧34可以耦合在弹簧板32和基体40之间,以向弹簧板32提供规格化偏差(normalizing bias)。此外,尽管本文中参考耦合到弹簧板32的弹簧34进行讨论,但应理解,弹簧34可以经由悬臂作用(cantilever action)或任何其他合适的力分配部件耦合在实现弹簧34的选择性接合的乘坐运载器16中的任何合适的位置处,包括在其中弹簧34与致动器板70的任何合适的表面接合的位置。即,合适的位置可以是响应于弹簧板32的倾侧超过阈值角而使弹簧34从其接合的任何合适的位置。在这些实施例中的一些中,弹簧34的一端或两端可耦合到弹簧板32并在弹簧板32和致动器板70之间选择性地压缩。在其他实施例中,弹簧34可以备选地耦合到致动器板70的顶表面80。
21.如所示的,阻力控制系统12还包括传感器90,以收集与乘坐运载器16和/或其上的乘坐者22有关的合适的信息。例如,传感器90目前包括耦合到弹簧板32的倾斜仪92,以感测弹簧板32的位置或倾斜的角度和方向。在一些实施例中,倾斜仪92感测弹簧板32的倾斜到千分之一度。在其他实施例中,加速度计、位置传感器等可以附加地或备选地耦合到乘坐运载器16。此外,阻力控制系统12的传感器90包括重量传感器94,其感测指示乘坐者22的重量的数据并将该数据传送到运载器控制器14。在本实施例中,重量传感器94被示出为直接耦合到支撑梁42,因此使得重量传感器94能够感测通过支撑梁42引导的来自乘坐者22的全部重量或力。在其他实施例中,重量传感器94可以定位在乘坐者22和乘坐运载器16的基体40之间的任何地方,诸如在座椅20和弹簧板32之间。
22.在其他实施例中,重量传感器94可以省略,并且乘坐运载器16可以包括用户输入设备,该用户输入设备使乘坐者22能够提供指示重量、用户简档(profile)和/或指示期望阻力设置或目标阻力设置的另一参数的输入。在实施例中,运载器控制器14可接收其他数据以控制乘坐运载器16。作为示例,运载器控制器14可包括或通信地耦合到视觉或成像传感器96,视觉或成像传感器96可读取与乘坐者22(诸如由乘坐者22穿戴的)相关联的部件的标识符(例如,射频识别标签、条形码)。例如,标识符可以唯一地与乘坐者22的用户简档相关联,并且可以指示设置(例如,阻力)偏好、用户历史(例如,关于游乐景点的先前体验)或与乘坐者22具体相关的其他方面。因此,运载器控制器14可以使用标识符以便确定要由阻力控制系统12提供的期望阻力设置或目标阻力设置。作为另一示例,运载器控制器14可包括输入设备98,或通信地耦合到输入设备98,乘坐者22可与输入设备98交互,以便提交指示期望阻力设置的输入。为此,输入设备98可以包括特征,诸如触摸屏、键盘、音频辨识部件、跟踪板、表盘、按钮、旋钮、开关或任何其他合适的特征,并且乘坐者22可以利用输入设备98来输入重量、标识符、期望阻力设置等。然后,运载器控制器14可基于用户输入指导阻力控制系统12调节致动器板70相对于弹簧板32的位置。
23.继续讨论运载器控制器14,运载器控制器14通常负责控制乘坐运载器16以提供弹簧板32和致动器板70之间的目标距离,以及负责使乘坐者体验(例如,运载器16的物理移动)与通过vr设备24传递的虚拟体验对准。应当注意,vr设备24可以代表不同和/或附加效果(例如,平面屏幕显示器和音频系统)。运载器控制器14可以经由任何合适的、相应的(例如形成有线或无线网络的)通信电路系统而与游乐景点10和/或阻力控制系统12的其他部件通信。在本实施例中,运载器控制器14通信地耦合到vr设备24的vr控制器26、致动器74、倾斜仪92和重量传感器94。在一些实施例中,运载器控制器14可以包括在乘坐运载器16的外壳或底盘中。在其他实施例中,运载器控制器14可以远离乘坐运载器16,并协调多个乘坐运载器16的操作。
24.所示实施例的运载器控制器14包括通过相应无线通信部件66向乘坐运载器16提供指令的处理器100,以及存储用于处理器100的指令的存储器102(例如,一个或多个存储器),以及阻力设置数据库104。然而,要理解,任何部件都能够适当地存储在任何合适的位置中(诸如在云数据库内),并从任何合适的位置更新。处理器100是能够执行用于执行当前公开的技术的指令的任何合适的处理器,诸如通用处理器、片上系统(soc)设备、专用集成电路(asic)或一些其他类似的处理器配置。在一些实施例中,这些指令被编码在存储在有形的、非暂时性的、计算机可读的介质(诸如存储器102和/或其他存储电路或设备)中的程序或代码中。
25.如将理解的,阻力设置数据库104是具有基于从传感器90接收的数据与弹簧板32的移动的阻力相对应的阻力设置的数据的存储。实际上,阻力设置数据库104可以将数据与用于致动器74的目标致动器长度(例如,目标长度、阈值范围内的长度)相对应。因此,阻力设置数据库104使得运载器控制器14能够适当地移动致动器板70,以张紧用于与宽范围的因素相关联的乘坐者22的乘坐运载器16的弹簧34。作为示例,阻力控制系统12指导致动器74为更轻的乘坐者22提供更小的阻力,并为更重的乘坐者22提供更大的阻力。作为另一示例,阻力控制系统12可指导致动器74基于由乘坐者22输入的或以其他方式由乘坐者22指示的所请求的阻力来提供阻力。在一些实施例中,阻力设置数据库104将目标致动器长度与由传感器90接收的信号(诸如重量传感器94以伏特为单位的原始输出)相对应。与将原始输出转换为诸如重量单位的值的实施例相比,这样的对应性可以改善用于阻力控制系统12的私密性和/或减少计算延迟。例如,阻力设置数据库104可以包括用于任何合适范围的原始输出和/或高于可定制的较低重量限制(诸如每1磅、5磅、10磅和50磅)的重量的目标致动器长度。
26.在一些实施例中,阻力设置数据库104包括对应于相应虚拟体验、相应乘坐者年龄、相应乘坐者简档等的个性化目标致动器长度。例如,在其中通过vr设备24提供的虚拟体验是细节导向的或具有挑战性的体验的实施例中,阻力控制系统12可以实施相对高的阻力设置(例如,增加10%的张力)以向乘坐运载器16提供更多的运动灵敏度。此外,在其中阻力控制系统12确定乘坐者22的乘坐者简档指示对放松体验(例如,放松的vr游戏)的偏好的实施例中,阻力控制系统12可以实施相对低的阻力设置,并指导vr设备24提供适合于相对低的阻力设置的简化虚拟体验。某些实施例的阻力控制系统12还可以在游乐景点10的乘坐循环的持续期间调节乘坐运载器16的阻力,诸如通过响应于确定乘坐循环接近完成、乘坐者22正在进入由vr设备24支持的模拟环境的特定区域、乘坐者22已经在模拟环境内执行了某
个任务、乘坐者22已经提供了指示所请求的阻力调节的用户输入等而增加阻力。
27.考虑到阻力控制系统12的上述特征,本文中提供了关于阻力控制系统12的操作的进一步讨论,以调节乘坐运载器16的重量阻力并提高乘坐者对乘坐运载器16的满意度。例如,图2是所示过程120的实施例的流程图,所述过程120使阻力控制系统12能够遍及游乐景点10的乘坐循环控制乘坐运载器16。在过程120中所示的步骤意在促进讨论,而不旨在限制本公开的范围,因为可以执行附加步骤,可以省略某些步骤,并且可以在适当的情况下以备选的顺序或并行地执行所示的步骤。过程120可以表示存储在非暂时性计算机可读介质(例如,存储器102)中并且例如由阻力控制系统12的运载器控制器14的处理器100执行的启动代码或指令。处理器100可以经由诸如无线网络的网络通信地耦合以接收和发送下面描述的指令和信号。
28.在当前示出的实施例中,执行过程120的运载器控制器14通过接收(框124)输入来开始(框122)乘坐循环。例如,运载器控制器14可以在乘坐者22已经登上乘坐运载器16之后从重量传感器94接收信号。在一些实施例中,重量传感器94可以连续地传送信号,使得运载器控制器14响应于信号在阈值时间段内是恒定的(例如,在1%内、在5%以内)而将信号中的一个识别为指示乘坐者22的重量。这样的实施例可以通过向运载器控制器14提供乘坐者22的基线重量值来促进游乐景点10内的安全性。因此,运载器控制器14可以响应于检测到的重量值在距基线重量值的预定阈值之外(例如,指示掉落的物品、过早离开)而向游乐景点10的操作者呈现警报和/或关闭乘坐运载器16。在附加实施例或备选实施例中,运载器控制器14可以接收诸如来自视觉传感器96的图像或其他标识符。标识符可以指示乘坐者22的阻力设置,诸如所请求的阻力设置。在其他实施例中,运载器控制器14可以从输入设备98接收用户输入。用户输入可以指示进入用户界面中的乘坐者22的重量或所请求的阻力设置。在一些实施例中,运载器控制器14将用户输入转换为值,诸如重量值。因此,应当理解,运载器控制器14可关于任何合适的接收的信息(其例如可包括重量传感器94的以伏特为单位的原始输出)执行过程120的以下步骤。
29.继续过程120,运载器控制器14查询(框126)阻力设置数据库104,以检索对应于输入的目标致动器长度。如所提到的,阻力设置数据库104包括将致动器74的相应长度与诸如乘坐者重量的各种数据或参数相关联的记录。因此,运载器控制器14利用输入来为致动器74识别合适的致动器长度,该合适致动器长度基于特定参数为乘坐者22提供适当的移动的阻力。通常,相比于更轻的乘坐者重量,对于更重的乘坐者重量来说,目标致动器长度更多地延伸(例如,对应于更小的分离距离76),以增加乘坐运载器16的移动阻力以用于更重的乘坐者重量。。在识别出适当的目标致动器长度的情况下,运载器控制器14控制、操作或指导(框130)致动器74延伸或收缩以达到目标致动器长度,从而将致动器板70设置在距弹簧板32的指定分离距离76处。在其他实施例中,阻力设置数据库104可以包括将致动器板70的相应位置与各种乘坐者参数相关联的记录,并且阻力控制系统12可以通过将致动器板70移动到对应于特定乘坐者参数的目标致动器板位置来控制乘坐运载器16的重量阻力,该特定乘坐者参数对应于距弹簧板32的目标分离距离76。
30.在将乘坐运载器16的张力校准为输入的情况下,运载器控制器14通过乘坐运载器16向乘坐者22提供(框132)与通过vr设备24提供的虚拟体验相对应的乘坐体验。例如,vr设备24的vr控制器26可指导处理器62生成特定虚拟图像以显示给乘坐者22。乘坐者22通常相
对于乘坐运载器16移动他或她的体重,以向运载器控制器14提供用户输入(例如,经由倾斜仪92),运载器控制器14将用户输入通信到vr控制器26。因此,vr控制器26调节显示给乘坐者22的虚拟图像,以显示与接收到的用户输入相对应的虚拟图像的目标集。例如,响应于乘坐者22向左倾斜,弹簧板32可基于乘坐运载器16的阻力在俯仰52上移动特定量(例如,数英寸)。倾斜仪92感测弹簧板32的移动,并将指示该移动的信号传送到运载器控制器14。因此,运载器控制器14可以指示vr控制器26调节通过vr设备24提供的虚拟图像,以显示在俯仰52上的对应虚拟移动。应理解,在其他实施例中,vr控制器26嵌入或存储在运载器控制器14内。应理解,在其他实施例中,游乐景点10可以包括除vr设备24以外或附加于vr设备24的特征,诸如投影屏幕,其接收用户输入作为增强乘坐者享受的反馈。在其他实施例中,诸如在其中乘坐运载器16沿着轨道移动的那些实施例中,vr设备24和vr控制器26被省略。
31.除了命令vr设备24响应乘坐运载器16的移动之外,阻力控制系统12还使乘坐运载器16能够响应来自vr控制器26的指令。例如,执行过程120的运载器控制器14确定(框134)是否从vr控制器26接收到触觉反馈请求。继续上述示例,响应于乘坐者22操纵乘坐运载器16使得乘坐运载器16的虚拟表示接触边界(例如,栅栏、云、障碍物),vr控制器26可以请求运载器控制器14振动或以其他方式操控乘坐运载器16以指示该接触。应理解,运载器控制器14可以从vr控制器26接收任何单个或多个触觉反馈请求,包括连续请求和/或预编程请求。
32.响应于接收到触觉反馈请求,运载器控制器14指导(框136)致动器74操控致动器板70以对应于vr设备24的vr体验。在某些实施例中,致动器74可以延伸以将致动器板70定位为与弹簧板32的弹簧34接触和/或移动弹簧板32,从而向乘坐者22提供触觉反馈。运载器控制器14可以指导致动器74单独地或与彼此同步地调节长度。例如,可指导致动器74进一步张紧乘坐运载器16的一个区域(例如,象限、侧部),以阻止乘坐者22在对应于该一个区域的方向上操纵乘坐运载器16。在其他实施例中,可指导致动器74顺序地上下或以随机方式移动致动器板70的整体,以向乘坐者22提供漂浮的体验。在满足触觉反馈请求之后,运载器控制器14可返回以指导(框130)致动器74移动到目标致动器长度。
33.备选地,响应于确定触觉反馈请求不是未满足的或未完成的,运载器控制器14可确定(框140)游乐景点10的当前乘坐循环是否完成。运载器控制器14可以参考时钟、vr控制器26或任何其他合适的部件来执行框140的确定。响应于确定乘坐循环未完成,执行过程120的所示实施例的运载器控制器14返回到框134以继续确定是否接收到触觉反馈请求。备选地,响应于确定乘坐循环完成,运载器控制器14指导(框142)致动器74返回到默认长度,从而结束(框144)过程120。默认长度可以对应于致动器74的放松状态、适合大多数乘坐者22的最常见长度、便于从乘坐运载器16上拆卸(例如,将弹簧板32朝游乐景点10的出口倾侧)的长度等。因此,具有运载器控制器14的阻力控制系统12通过半被动地将乘坐运载器16的重量阻力调整到每个特定的乘坐者参数来有效地改进游乐景点10内的乘坐者体验。此外,本文中公开的阻力控制系统12向乘坐者22提供与通过vr设备24提供的虚拟图像相对应的动态触觉反馈,进一步生成动态且愉快的乘坐者体验。
34.在某些实施例中,vr控制器26可以配置成以使得乘坐者22能够在相同虚拟环境内与彼此虚拟交互的方式操作相应乘坐者22的多个vr设备24。例如,vr控制器26可致使vr设备24呈现虚拟体验,在该体验中乘坐者22可在比赛中与彼此竞争。为此原因,vr控制器26还
可以致使vr设备24呈现另一乘坐者22的虚拟图像,基于与另一乘坐者22的交互输出触觉反馈,或者以其他方式基于另一乘坐者22操作vr设备24。通过示例,多个乘坐运载器16可以位于游乐景点10的相同外壳或房间内,使得游乐景点10能够同时容纳多个乘坐者22,诸如参与由相应vr设备24呈现的相同虚拟环境的乘坐者22。在附加实施例或备选实施例中,游乐景点10能够容纳参与不同虚拟环境和体验的多个乘坐者22。即,游乐景点10可以容纳多个乘坐者22,但是乘坐者22的至少部分可以处于分离的虚拟体验中,并且不与彼此虚拟地交互。在任何情况下,与具有单个乘坐运载器16的游乐景点10相比,这样的布置可以提高向乘坐者22提供虚拟体验的效率。
35.考虑到对阻力控制系统12的操作的上述理解,本文中提供关于由阻力控制系统12控制的乘坐运载器16的示例实施例的进一步讨论。例如,图3是具有在水平方位上(例如,与水平轴线160对准)的弹簧板32的乘坐运载器16的实施例的横截面正视图。如上所讨论的,乘坐运载器16包括致动器板70、弹簧板32和具有基体板、支撑梁42和枢转接头46的支撑组件60。因为乘坐运载器16是静止的,所以基体40设置成与地面54接触。在其他实施例中,阻力控制系统12可用于可移动的运动基体以及地面54可以表示乘坐运载器16所耦合到其的更大运载器。
36.乘坐运载器16还包括六个弹簧34,其在本实施例中图示为锥形机械弹簧。锥形机械弹簧通常具有长度可变的或非线性的弹簧常数,使得弹簧抵靠致动器板70的初始压缩比弹簧34的进一步压缩以更小的力进行。在本实施例中,弹簧34以六角形或圆形的形式从彼此均匀地间隔开,所述六角形或圆形在枢转接头46之上居中。然而,应理解,在乘坐运载器16内可以采用任何其他合适类型、形式和数量的弹簧34,以选择性地抵靠和/或接触致动器板70压缩。例如,在一些实施例中,锥形弹簧可以用圆柱形螺旋弹簧代替,圆柱形螺旋弹簧具有串联地耦合到彼此的渐进的弹簧常数(例如,复合弹簧)。乘坐运载器16可以备选地包括单个弹簧34,该弹簧34适当地定位在乘坐运载器16内,以使本公开的特征能够动态地调节乘坐运载器16的重量阻力。
37.阻力控制系统12还包括进一步改进乘坐运载器16上的乘坐者体验的调适特征。例如,本实施例的乘坐运载器16包括控制弹簧板32的移动的限速器170(例如,气体弹簧)。限速器170各自耦合在弹簧板32和位于弹簧板32的外边缘174下方的外围支撑梁172之间。在所图示的实施例中,限速器170包括球形滚动轴承176,所述球形滚动轴承176提供三轴旋转自由度,然而可以采用具有相同或更受限制的旋转移动的任何其他合适的连接部件。限速器170包括活塞180和杆182,杆182相对于活塞180移动以向乘坐运载器16的运动提供阻尼。应当注意,在一些实施例中,此阻尼运动对应于乘坐运载器的部分或在乘坐运载器内的座椅、乘坐运载器(有效地是座椅)、或乘坐运载器和乘坐运载器的座椅两者的移动。
38.图4是具有处于倾侧方位中的弹簧板32的静止的乘坐运载器16的一个实施例的侧部透视图。如所示的,弹簧板32相对于致动器板70以倾斜角200设置,这是由于可登到弹簧板32上的乘坐者22的重量转移。乘坐运载器16还包括定位在设置在弹簧板32下方的外周支撑梁172上的缓冲器202(例如,橡胶缓冲器、止动件)。缓冲器202通常使弹簧板32能够自由旋转直到阈值倾斜角,在阈值倾斜角处弹簧板32的底表面36接触缓冲器202,并且缓冲器202可以阻止弹簧板32的进一步旋转,以便于避免弹簧板32相对于致动器板70的不稳定方位。通过示例,缓冲器202可使弹簧板32能够旋转到形成相对于致动器板70在10度内的倾斜
角200的各种位置。因此,缓冲器202可将弹簧板32的移动限制在物理移动范围或包络内。缓冲器202还可包括向运载器控制器14提供信号以指示弹簧板32是否接触相应缓冲器202的接触传感器。例如,响应于确定弹簧板32接触缓冲器202中的一个,运载器控制器14可提供触觉反馈以促使乘坐者22转移他或她的重量,使得弹簧板32不再接触缓冲器202。在一些实施例中,六个缓冲器202和六个外围支撑梁172可以包括在乘坐运载器16中。在这样的情况下,每个其他外周支撑梁172也可以经由上面讨论的限速器170之一间接耦合到弹簧板32。
39.本实施例中所图示的致动器74耦合在致动器板70和基体40之间。因此,致动器74可沿竖直轴线72移动致动器板70以调节弹簧34的有效弹簧常数,诸如通过增加或减小致动器板70和弹簧板32之间的分离距离76(例如,在对应于枢转接头46或弹簧板32的支点的水平位置中)。乘坐运载器16可以包括三个以三角形形式从彼此等距间隔开的致动器74,然而应理解,可以包括附加的致动器74并且以任何合适的多边形形状相对于彼此均匀间隔开。此外,上面讨论的限速器170可以定位成三角形形式,该三角形形式是致动器74的三角形形式的镜像,从而围绕乘坐运载器16的外周均匀地分配限速器170和致动器74的力。在其他实施例中,诸如那些其中乘坐运载器16是可移动的实施例中,限速器170和致动器74的力可围绕乘坐运载器16的座椅均匀地分布。
40.图5是图示在游乐景点10内控制乘坐运载器16的阻力控制系统12的另一实施例的透视图。乘坐运载器16包括弹簧板32和耦合到弹簧板32的顶表面30的座椅20或其他乘坐者容纳设施。从座椅20,乘坐者22可以用他或她的体重操纵乘坐运载器16。值得注意的是,乘坐运载器16包括耦合到弹簧板32的底表面36的弹簧柱250,以基于与乘坐者22相关联的参数选择性地调节乘坐运载器16的阻力。每个弹簧柱250包括能够调节高度的弹簧组件252,其被乘坐者22的重量被动地(例如,自然地)压缩到目标高度260。
41.在本实施例中,每个能够调节高度弹簧组件252包括三个弹簧区域262,即:高压缩区域264、中压缩区域266和低压缩区域268。如本文中所使用的,每个弹簧区域262被定义为提供相应弹簧常数的任何合适部件。因此,低压缩区域268具有比中压缩区域266或高压缩区域264更大的弹簧常数,这表明利用了更多的力来压缩低压缩区域268(例如,如由胡克定律所近似的那样)。在本实施例中,通过为弹簧区域262选择目标线材厚度来提供每个弹簧区域262的压缩性,然而可以改变弹簧区域262的任何其他合适的性质(例如,材料、涂层、处理、尺寸)。
42.例如,高压缩区域264可设计成对具有第一重量范围(例如,0至50磅)的乘坐者活跃,超过该第一重量范围,高压缩区域264被完全压缩并基本上是刚性的。其他弹簧区域266、268可以被可忽略不计地压缩,并且对于具有在第一重量范围内的重量的乘坐者来说起到基本上刚性的作用。中压缩区域266可以被设计成对于高于第一重量范围的第二重量范围(例如51至150磅)活跃。因此,中压缩区域266对于具有在第二重量范围内的重量的乘坐者来说是可主动压缩的,而高压缩区域264被完全压缩,并且低压缩区域268基本上是刚性的。类似地,低压缩区域268可设计成在支撑具有在第三重量范围内(例如,151至300磅)的重量的乘坐者时活跃,使得其他弹簧区域264、266被完全压缩。因此,在乘坐者22登上乘坐运载器16之后,乘坐运载器16的能够调节高度的弹簧组件252被动地压缩,以将乘坐运载器16的重量阻力调整到乘坐者22的重量。在附加实施例或备选实施例中,弹簧组件252的压缩可以基于与乘坐者相关联的其他参数,包括所请求的阻力设置、先前的经验等(例如,经
由基于接收到的或确定的输入来调节重量阻力的半被动控制系统)。
43.弹簧区域262目前包括圆柱形螺旋盘绕弹簧,其在弹簧板32和相应的基体板272之间与彼此串联耦合。在其他实施例中,每个弹簧柱250可以包括沿着弹簧柱250的高度提供连续可变弹簧区域的单个锥形弹簧,或者上面讨论的其他合适的阻力可变部件(例如,气体弹簧、磁性排斥组件)。尽管图示了四个弹簧柱250,每个弹簧柱250具有三个弹簧区域262,但应理解,在乘坐运载器16内可以实施具有任何合适数量的弹簧区域262的任何合适数量的弹簧柱250,包括定位在弹簧板32的中心点274下方的单个弹簧柱250。根据本公开,对弹簧元件的参考可包括能够提供阻力弹簧力的任何特征,诸如金属弹簧、塑料弹簧、板簧、锥形或圆柱形盘绕物、气体弹簧、磁性排斥组件等。
44.在所示的实施例中,每个弹簧柱250包括耦合在相应基体板272和弹簧板32之间的连杆机构280(例如,缆线、绳索、链),以限制弹簧柱250的横向运动。连杆机构280被图示为设置在能够调节高度的弹簧组件252内,然而应理解,连杆机构280可以定位在弹簧柱250内的其他地方。在某些实施例中,连杆机构280有助于将弹簧柱250固定到目标高度260,如以下更详细讨论的。在其他实施例中,乘坐运载器16可以在不固定弹簧柱250的情况下操作,从而使得游乐景点10的构造和操作更不复杂。
45.图6是阻力控制系统12的实施例的示意图,该阻力控制系统12包括上面讨论的运载器控制器14和vr控制器26。本讨论集中于乘坐运载器16的单个弹簧柱250的操作,然而应该理解每个弹簧柱250可以类似地操作。弹簧柱250的图示实施例包括锁定设备300,锁定设备300基于乘坐者22的重量选择性地将弹簧柱250固定在目标高度260处。例如,锁定设备300可以是棘轮设备,其接收耦合到连杆机构280的主体306的远端304的肋状延伸部302。在这样的实施例中,基体板272可以包括开口,该开口使得连杆机构280的主体306能够耦合到基板272的与肋状延伸部302相对的侧部并设置在基板272的与肋状延伸部302相对的侧部上。在这样的实施例中,乘坐者22的重量可以将能够调节高度的弹簧组件252被动地压缩到目标高度260,将弹簧板32更靠近基体板272移动,并且将肋状延伸部302下压到相对于锁定设备300的目标位置。应理解,可以在乘坐运载器16内实施任何其他合适的锁定设备,诸如固定连杆机构280的卷轴(reel)和线轴(spool)、卡钳制动器、锁定气体弹簧、磁性保持系统、锁定齿条和/或小齿轮等。
46.在具有锁定设备300的实施例中,运载器控制器14通信地耦合到锁定设备300以控制锁定设备300的操作。例如,锁定设备300的棘轮实施例可以响应于由乘坐者的重量施加的力被动地保持弹簧柱250以具有目标高度260。在具有主动锁定设备300的其他实施例中,运载器控制器14可响应于确定游乐景点10的乘坐循环被启动而指导锁定设备300固定弹簧柱250。在任一情况下,运载器控制器14可指导锁定设备300释放肋状延伸部302或弹簧柱250的其他合适部件,以响应于确定乘坐循环完成而使弹簧柱250能够返回到默认高度(例如,未压缩高度)。
47.阻力控制系统12的所示实施例还包括耦合到弹簧板以向vr控制器26提供反馈的倾斜仪92,从而使vr控制器26能够将vr设备24的虚拟体验与乘坐运载器16的当前位置对准。如上所讨论的,任何其他合适的传感器90可以附加地或备选地耦合到乘坐运载器16,以促进游乐景点10的操作。值得注意的是,图5和图6的阻力控制系统12不包括重量传感器94,提供了乘坐运载器16的更不复杂的实施例,同时实现乘坐运载器16的重量阻力的半被动控
制以用于改进的乘坐者的体验。
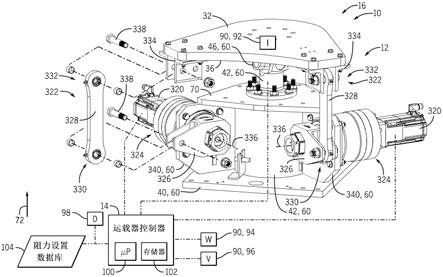
48.图7是使用阻力控制系统12用于控制乘客支撑件(例如,座椅20、乘坐运载器座舱)的移动的乘坐运载器16的实施例的透视图。阻力控制系统12包括马达320和连杆系统322,以使马达320能够驱动弹簧板32绕在弹簧板32和致动器板70之间延伸的支撑梁42的枢转接头46的移动。因此,马达320可驱动弹簧板32相对于致动器板70的移动。尽管所示的乘坐运载器16包括弹簧板32和致动器板70,但应注意,弹簧板32和致动器板70表示任何合适的基座、支撑件或支撑架。即,弹簧板32和/或致动器板70可以具有任何合适的形状(例如,圆顶形、球体、立方体)以提供乘坐运载器16的移动。
49.每个马达320(例如,机电马达、气动马达、液压马达)可操作以调节弹簧板32绕枢转接头46的移动的阻力。在所示的实施例中,每个马达320耦合到连杆系统322的相应齿轮箱324,并且每个齿轮箱324耦合到连杆系统322的第一支架326。因此,由马达320输出的诸如以致使马达320的轴旋转的扭矩可以驱动齿轮箱324的齿轮的旋转以致使第一支架326的旋转。作为示例,每个马达320可以利用无键衬套来旋转轴和齿轮箱324,以实现弹簧板32的平滑移动。每个第一支架326在连杆328的第一端330处耦合到连杆系统322的连杆328。此外,每个连杆328的第二端332可以耦合到连杆系统322的相应第二支架334,并且每个第二支架334耦合到弹簧板32的底表面36的一区段(例如,角部、侧部)。
50.每个马达320可配置成输出扭矩,该扭矩可控制和/或驱动第一支架326绕相应水平轴线336或平行于水平轴线336的相应轴线的旋转移动。第一支架326的这样的旋转移动可致使连杆328大致沿着平行于竖直轴线72的轴线的对应移动,以将力传到弹簧板32的相应区段上。所传的力可以相对于致动器板70移动(例如,俯仰、滚动)弹簧板32。为此,每个连杆328可以能够旋转地耦合到对应的第一支架326和第二支架334,诸如经由连杆系统322的能够旋转紧固件338(例如,肩部螺钉),以实现连杆328和支架326、334之间绕相应水平轴线336的旋转移动。连杆328和支架326、334之间的旋转可以实现弹簧板32相对于致动器板70的移动的更大的控制。此外,连杆328与支架326、334之间的耦合可使连杆328之间相对于支架326、334的附加移动能够促进弹簧板32相对于致动器板70的移动。作为示例,连杆328可沿能够旋转的紧固件338线性平移和/或可相对于支架326、334绕另一轴线旋转(例如,经由连杆系统322的附加紧固件)。
51.在所示的实施例中,连杆系统322经由在基体40和致动器板70之间延伸的板340(例如,耦合到支撑梁42)来支撑。例如,可以是支撑组件60的一部分的板340可以固定地耦合到致动器板70、基体40和/或支撑梁42,并且齿轮箱324可以固定地耦合到板340,以阻止齿轮箱324和支撑组件60之间的移动,从而稳定连杆系统322。以这种方式,板340可促进通过马达320提供弹簧板32相对于致动器板70的期望移动。
52.在一些实施例中,每个马达320可以是能够反向驱动的。即,传到弹簧板32上的足够的力(例如,由乘坐者22移动他或她的体重致使的)可以致使弹簧板32相对于致动器板70的移动与由马达320输出的扭矩致使的弹簧板32的移动相反。换句话说,可以使用足够的力来致使第一支架326中的任何在与由马达320输出的扭矩致使的旋转的方向相反的方向上旋转。以这种方式,由马达320输出以将力传到弹簧板32上的扭矩的量可以调节抵抗由马达320输出的扭矩使弹簧板32相对于致动器板70移动所需的反力的量。因此,由马达320输出的扭矩设置弹簧板32的移动的阻力。特别地,增加扭矩输出可能增加移动的阻力,并且减小
扭矩输出可能减小移动的阻力。
53.每个马达320通信地耦合到运载器控制器14,并且运载器控制器14可相应地指导马达320输出扭矩。实际上,运载器控制器14可接收输入,诸如来自倾斜仪92、重量传感器94、视觉传感器96、输入设备98、另一合适来源或其任何组合的输入,并且运载器控制器14可操作马达320以基于输入提供弹簧板32的移动的阻力。在所示的实施例中,重量传感器94定位在基体40的下方(例如,耦合到基体40的下侧),以使重量传感器94能够监测弹簧板32、支撑组件60、致动器板70、马达320、连杆系统322、乘坐者22等(例如,整个乘坐运载器16)的重量。在附加实施例或备选实施例中,重量传感器94可以定位(例如,在致动器板70和弹簧板32之间)成监视乘坐运载器16的一部分和/或乘坐者22的一部分。在任何情况下,可以结合上述关于设置弹簧板32的移动的阻力的任何技术,以便诸如基于乘坐者22的重量、乘坐者22的偏好、乘坐者22的标识符等来设置由马达320输出的扭矩。作为示例,运载器控制器14可在半被动模式下操作,以经由马达320的扭矩输出在弹簧板32和致动器板70之间传移动的阻力,并且运载器控制器14可参考阻力设置数据库104以确定要由马达320输出的特定扭矩,诸如基于存储在阻力设置数据库104中并将扭矩输出与另一参数相关联的算法或数据库表(例如,查找表)。
54.运载器控制器14还可以在致使每个马达320输出克服由乘坐者22传到弹簧板32上的力的扭矩的主动模式下操作。实际上,在主动模式下,运载器控制器14可以操作马达320以驱动弹簧板32以期望的方式相对于致动器板70移动(例如,到目标位置或方位),而代替使乘坐者22能够驱动弹簧板32的移动(例如,在运载器控制器14的半被动模式下)。例如,运载器控制器14可以在主动模式下操作以移动弹簧板32并将某种感觉和乘坐体验传给乘坐者22。为此,运载器控制器14可以接收传感器数据,诸如经由倾斜仪92确定的弹簧板32的方位和/或经由重量传感器94确定的乘坐者22的重量,以确定要由马达320输出的适当扭矩,以致使弹簧板32相对于致动器板70的期望移动。
55.实际上,运载器控制器14可以在单个乘坐循环的不同时间处调节由马达320输出的扭矩。通过示例,在乘坐循环的第一时间处,运载器控制器14可以在第一半被动模式下操作,该第一半被动模式指导马达320输出相应的扭矩以在弹簧板32和致动器板70之间导致第一移动的阻力,该第一移动阻力使乘坐者22能够移动弹簧板32。在乘坐循环的第二时间处,运载器控制器14可以在第二半被动模式下操作,该第二半被动模式指导马达320增加扭矩输出以在弹簧板32和致动器板70之间导致第二增加的移动的阻力,该第二增加的移动的阻力使乘坐者22能够更困难地移动弹簧板32。在乘坐循环的第三时间处,运载器控制器14可以在主动模式下操作,该主动模式指导马达320进一步增加扭矩输出以驱动弹簧板32和致动器板70的移动,并阻止乘坐者22相对于致动器板70移动弹簧板32。因此,运载器控制器14可以在不同的模式下操作,以在乘坐循环的不同时间处为乘坐者22创建不同的体验。例如,运载器控制器14可以基于预定设置(例如,乘坐循环的时间)、响应于传感器数据、基于乘坐者22的偏好等在不同模式下操作。
56.此外,运载器控制器14可以基于弹簧板32相对于致动器板70的定位来调节由马达320输出的扭矩。通过示例,响应于确定弹簧板32和致动器板70之间的倾斜角200的增加(例如,基于从倾斜仪92接收到的传感器数据),运载器控制器14可指导马达320之一增加扭矩输出以阻止倾斜角200进一步增加。以这种方式,运载器控制器14可以调节由马达320输出
的扭矩,以调节弹簧板32的移动的阻力,以将弹簧板32和致动器板70之间的倾斜角200保持在阈值以下。
57.图8是使用阻力控制系统12的乘坐运载器16的实施例的透视图,所述阻力控制系统12包括三个马达320和三个对应的连杆系统322。运载器控制器14可以通信地耦合到每个马达320以便移动弹簧板32。通过示例,所示的弹簧板32具有三角形形状,其中第一马达320a配置成移动耦合到弹簧板32的第一角部360的第一连杆系统324a,第二马达320b配置成移动耦合到弹簧板32的第二角部362的第二连杆系统324b,以及第三马达320c配置成移动耦合到弹簧板32的第三角部364的第三连杆系统324c。运载器控制器14可以控制马达320以协调角360、362、364的移动,以便控制弹簧板32相对于致动器板70的移动。
58.与经由两个马达320控制弹簧板32相比,经由三个马达320控制弹簧板32可以使得能够更好地控制弹簧板32的移动。作为示例,除了使弹簧板32相对于致动器板70俯仰和/或滚动,运载器控制器14还可以沿着平行于竖直轴线72的轴线平移弹簧板32,以便于将弹簧板32升起。在一些实施例中,运载器控制器14可以控制马达320,以便将角部360、362、364中的每个移动到相应的目标位置。例如,运载器控制器14可控制马达320以致使角部360、362、364中的每个沿平行于竖直轴线72的相应轴线移动基本相等的距离,以便使弹簧板32沿平行于竖直轴线72的轴线平移,而不使弹簧板32滚动和/或俯仰。
59.尽管图7中示出的实施例包括两个马达320和两个连杆系统322,并且图8中示出的实施例包括三个马达320和三个连杆系统322,但在附加实施例或备选实施例中,任何其他合适数量的马达320和连杆系统322可用于控制弹簧板32和致动器板70之间的移动。通过示例,可以使用单个马达320和单个对应的连杆系统322,或者可以使用多于三个马达320和多于三个对应的连杆系统322。实际上,用于控制弹簧板32的移动的马达320和相应的连杆系统322的数量可以基于弹簧板32的形状(例如,四个马达320和四个连杆系统322以移动具有矩形形状的弹簧板32的各个角部)和/或弹簧板32相对于致动器板70的期望的移动的量(例如,自由度的数量)。此外,应当注意,马达320、连杆系统322和弹簧34的组合可用于控制弹簧板32和致动器板70之间的移动。此外,上述任何技术也可用于致使弹簧板32的其他类型的移动,诸如沿平行于水平轴线160的轴线的平移移动。
60.图9是示出贯穿游乐景点10的乘坐循环用于经由马达320控制乘坐运载器16的过程380的实施例的流程图。过程380还可以表示存储在非暂时性计算机可读介质中的启动代码或指令,诸如用于由阻力控制系统12的运载器控制器14的处理器100执行。过程380中示出的某些步骤可以类似于上面关于过程120描述的步骤。此外,可以执行附加步骤,和/或在适当的情况下,可以省略、修改或以不同的顺序执行图9中描绘的某些步骤。
61.在过程380的执行期间,运载器控制器14还可以通过接收(框124)输入来开始(框122)乘坐循环。输入可以包括来自重量传感器94的重量、来自视觉传感器96的图像或标识符、和/或来自输入设备98的用户输入。然后,运载器控制器14查询(框382)阻力设置数据库104以检索对应于输入的目标扭矩输出。实际上,阻力设置数据库104可以包括将相应扭矩输出与各种数据或参数相关联的记录或算法,并且运载器控制器14可以利用该输入来识别用于每个马达320的合适的扭矩输出。通过示例,与对于更轻的乘坐者重量相比对于更重的乘坐者重量扭矩输出可以增加和/或与对于具有挑战性的体验相比对于更放松的体验扭矩输出可以增加,以增加乘坐运载器16的移动阻力。在识别出目标扭矩输出之后,运载器控制
器14控制、操作或指导(框384)马达320输出目标扭矩。
62.在校准由马达320输出的扭矩之后,运载器控制器14使用上述类似的技术,通过乘坐运载器16向乘坐者22提供(方框386)乘坐体验,并且乘坐体验可以对应于由vr设备24提供的虚拟体验。作为示例,由vr设备24呈现的图像可以对应于弹簧板32相对于致动器板70的移动(例如,基于对抗由马达320输出的扭矩由乘坐者22传的力)。此外,运载器控制器14可调节(框388)在乘坐体验期间由马达320输出的扭矩,以便与由vr设备24呈现给乘坐者22的虚拟环境相对应。在示例中,运载器控制器14可以从vr控制器26接收触觉反馈请求,并且运载器控制器14可以基于触觉反馈请求调节扭矩输出(例如,以满足触觉反馈请求)。在另一示例中,运载器控制器14可基于乘坐体验期间的时间或对应于乘坐体验的方面(例如,vr体验中的叙述性变化)的信号自动地调节扭矩输出。实际上,运载器控制器14可以指导马达320调节扭矩输出以改变弹簧板32和致动器板70之间的移动的阻力和/或在半被动模式和主动模式中的操作之间转换,在半被动模式中,乘坐者22可以主要驱动弹簧板32的移动,在主动模式中,马达320可以主要驱动弹簧板32的移动。在进一步的示例中,运载器控制器14可基于弹簧板32相对于致动器板70的方位来调节扭矩输出。例如,运载器控制器14可响应于接收到指示倾斜角200大于阈值角的传感器数据(例如来自倾斜仪92)来指导马达320增加扭矩输出,以便阻止弹簧板32的移动,该移动将进一步增加倾斜角200。
63.在已经完成乘坐循环之后,运载器控制器14可以指导(框390)马达320输出默认扭矩以结束(框144)过程120。默认扭矩可实现弹簧板32(例如,相对于致动器板70)的特定定位或方位,和/或可设置弹簧板32和致动器板70之间的移动的阻力,以促进从乘坐运载器16拆卸。例如,默认扭矩可以显著增加弹簧板32的移动的阻力,以避免在乘坐者22从乘坐运载器16下来时由乘坐者22传的力导致的相对于致动器板70的移动,以促进乘坐者22从乘坐运载器16退出。
64.因此,所公开的阻力控制系统的技术效果包括实现乘坐运载器的张力或重量阻力的选择性调节。因此,乘坐运载器容纳宽范围的乘坐者参数或偏好,以经由vr设备体验静止景点。通常,乘坐者通过相对于乘坐运载器倾斜或转移他或她的重量来向静止景点的vr系统提供输入。乘坐运载器被操作以适当地抵抗移动,以模拟通过vr设备传递的虚拟体验。在一些实施例中,乘坐运载器的弹簧板由枢转接头支撑,枢转接头使乘坐者能够用他或她的体重操控弹簧板。乘坐运载器包括至少一个弹簧,所述至少一个弹簧耦合到弹簧板的表面,以选择性地抵靠设置在弹簧板下方的致动器板压缩。致动器板经由至少一个致动器相对于弹簧板竖直定位,该至少一个致动器可向上或向下移动致动器板,以分别增加或减小阻力控制系统对乘坐者的移动阻力。因此,在正常乘坐循环期间,阻力控制系统可以接收指示与乘坐者相关联的参数的输入,并指导致动器将弹簧张紧到对应于该参数的预定设置。在其他实施例中,定位在柱中并耦合到弹簧板的复合或锥形弹簧可以被乘坐者被动地压缩到目标高度,从而为乘坐者的移动提供目标阻力。在进一步的实施例中,乘坐运载器可以包括至少一个能够反向驱动的马达,该马达耦合到弹簧板,并且输出扭矩以控制弹簧板和致动器板之间的移动的阻力,诸如响应于克服输出扭矩以反向驱动马达的力。例如,阻力控制系统可以基于接收到的输入来调节输出扭矩以增加或减小弹簧板的移动的阻力。马达也可以被控制以输出扭矩,从而致使弹簧板被主动地驱动和移动。在任何情况下,所公开的系统为具有更宽范围的重量、偏好和其他参数的客人提供了改进的体验。
65.虽然本文中已经图示和描述了本公开的仅某些特征,但对于本领域技术人员将想到许多修改和改变。因此,要理解,所附权利要求书旨在涵盖如落入本公开的真正精神范围内的所有这样的修改和变化。应意识到,关于上面讨论的附图所图示或描述的任何特征可以以任何合适的方式组合。
66.本文中所提出并且要求保护的技术被引用并且应用于明显改进本技术领域的具有实际性质的物体和具体示例,并且因此不是抽象的、无形的或纯理论的。此外,如果本说明书的末尾所附的任何权利要求包含指定为“用于[执行]
……
[功能]的装置”或“用于[执行]
……
[功能]的步骤”的一个或多个元素,则旨在这样的元素要根据35 u.s.c. 112(f)来解释。然而,对于包含以任何其他方式指定的元素的任何权利要求,旨在这样的元素不要根据35 u.s.c. 112(f)来解释。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1