智能魔方的制作方法
1.本发明涉及一种智能魔方。
背景技术:
2.通常,魔方是三维拼图的一种,由多个单元块组成以形成正六面体形状。使用者可以通过使正六面体的各个面以x轴、y轴或z轴为中心旋转,将正六面体的各个面调为相同颜色。这种魔方可以提高使用者的空间感知能力、记忆力等,因此用于各个年龄段。
3.但是,现有的魔方除了将正六面体的各个面调为相同颜色的功能外,不提供其他功能,从而降低使用者的兴趣,由此存在魔方的使用寿命缩短的问题。
4.为了解决这些问题,本技术人提出一种智能魔方,其中在构成魔方的各个单元块上设置显示部,从而可以显示各种内容。为此,需要在各个单元块设置端子,用于在相邻单元块之间传输电力和数据。但是,为了连接相邻的两个单元块之间的端子,各个端子必须是从单元块的表面凸出的形态,因此在操作魔方时,即单元块旋转时,存在由于端子之间的分离和接触而使摩擦阻力增加的问题。但是,如果为了减少摩擦阻力而降低端子的凸出高度,还存在无法确实保证端子之间的接触的问题。
5.现有技术文献
6.专利文献(专利文献1)韩国登记专利公报第10-1989125号(2019.06.14,智能魔方、用于利用所述智能魔方提供内容的系统以及其方法)
技术实现要素:
7.发明所要解决的课题
8.本发明的实施例提供了一种能够在操作魔方时减少由于端子之间的接触可能导致的摩擦阻力且确实保证端子之间的接触的智能魔方。
9.解决课题的方法
10.根据本发明的一个方面,提供一种智能魔方,包括主框架,以及多个单元块,所述多个单元块结合于所述主框架,并构成正六面体的各个面;所述单元块具备:显示部,所述显示部分别配置于所述单元块的暴露于外部的暴露面;以及端子,所述端子在所述单元块的与其他单元块相向的相向面中分别配置多个,用于传输所述显示部的电力和数据;所述端子配置为能够从形成于所述相向面的插入孔内引出;所述端子包括永久磁铁,使所述端子的引出端部侧磁极带有与其他单元块的端子的引出端部侧磁极相反的极性,以使所述端子通过磁力从所述插入孔中引出并接合于其他单元块的端子。
11.所述端子可以可滑动地结合于所述插入孔,并通过柔性电线电连接到所述显示部。
12.所述端子可以进一步包括导电层,所述导电层以包裹所述永久磁铁的方式形成以提供电力或数据传输通道,并且结合所述电线。
13.可以在所述端子的引出端部侧的棱角部分形成倒圆角部。
14.可以在所述插入孔的内周表面形成限制所述端子的最大引出长度的限位凸起,并且当所述端子和其他单元块的端子以所述最大引出长度引出时,在所述倒圆角部相互接触。
15.所述多个单元块可以包括:多个中心块,所述多个中心块可旋转地结合于所述主框架,并配置于所述正六面体的各个面的中央;多个棱块,所述多个棱块配置于所述正六面体的各个面的棱角;以及多个角块,所述多个角块配置于所述正六面体的各个面的边角;配置于所述正六面体的同一面的中心块、棱块和角块相互约束使其一起旋转。
16.所述主框架可以搭载有向所述多个中心块传输电力和数据的控制单元,所述端子可以包括配置于每个所述相向面的一对电力端子和一对数据端子。
17.所述一对电力端子可以传输相互不同电位的电力,所述一对电力端子的引出端部侧的磁极可以带有相反的极性。
18.可以在配置于所述正六面体的同一面的显示部之间进行数据传输,从所述中心块发出的数据在经过所有的配置在与该中心块同一面的多个棱块和多个角块之后到达该中心块,除了最初接收来自所述中心块的数据的棱块之外的其余棱块接收的数据在传输到角块之前经由所述中心块。
19.所述智能魔方还可以包括检测所述多个中心块各自的旋转方向和旋转角度的多个旋转检测部,所述控制单元以所述显示部各自的最初位置和所述多个旋转检测部的检测结果为基础计算所述显示部各自的最终位置,并将针对所述显示部各自的最终位置配置的数据传输到所述多个中心块。
20.所述旋转检测部可以包括:固定框架,所述固定框架结合于所述主框架;圆环,所述圆环结合于所述中心块,并且圆心配置于所述中心块的旋转轴;以及一对光遮挡中断传感器,所述一对光遮挡中断传感器结合于所述固定框架,所述圆环具备在所述圆环的半径方向上贯穿所述圆环的4个感应孔,所述光遮挡中断传感器包括配置于所述圆环的内侧和外侧并在所述圆环的半径方向上相向的光发射部和光接收部,随着所述圆环的旋转,当所述感应孔配置在所述光发射部和所述光接收部之间时生成检测信号,所述4个感应孔以所述中心块的旋转轴为中心以90度间隔配置,所述一对光遮挡中断传感器以所述中心块的旋转轴为中心以小于或大于180度的间隔配置。
21.所述旋转检测部可以以所述一对光遮挡中断传感器生成的检测信号的顺序和次数为基础检测所述中心块的旋转方向和旋转角度。
22.发明效果
23.根据本发明的实施例,操作魔方时,端子插入在单元块的相向面形成的插入孔中,从而能够减少摩擦阻力,当结束魔方操作时,通过磁力与相邻的单元块的端子接合,能够确实保证端子之间的接触。
附图说明
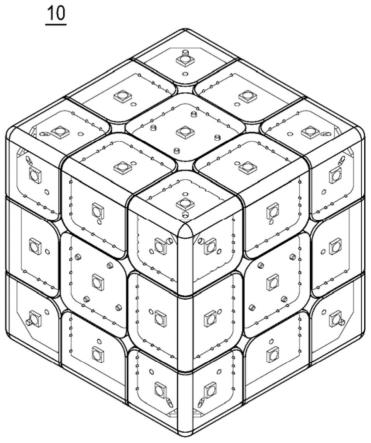
24.图1是示出根据本发明的一个实施例的智能魔方的立体图,
25.图2是示出图1的分解立体图,
26.图3是示出图2的主框架的立体图,
27.图4是示出图2的中心块的立体图,
28.图5是示出图4的中心块的暴露面的示意图,
29.图6是示出图4的中心块的相向面的示意图,
30.图7是示出图2的棱块的立体图,
31.图8是示出图7的棱块的相向面的示意图,
32.图9是示出图7的棱块的另一个相向面的示意图,
33.图10是示出图2的角块的立体图,
34.图11是示出图10的角块的相向面的示意图,
35.图12是说明根据本发明的一个实施例的智能魔方的数据流的图,
36.图13是示出图2的单元块的端子的截面图,
37.图14至图17是用于说明图13所示的端子的工作原理的图,
38.图18是示出旋转检测部的分解立体图,
39.图19是示出图18的圆环的平面图,
40.图20是示出图18的固定框架的平面图,
41.图21是用于说明图18的圆环和光遮挡中断传感器之间的配置关系的图,
42.图22和图23是用于说明图12的控制单元计算显示部各自的最终位置的原理或算法的图。
具体实施方式
43.下面,参考附图详细说明本发明的优选实施例。
44.本发明的实施例中使用的术语,除非定义为明显不同的意义,否则可以被解释为本发明所属的技术领域中的普通技术人员一般理解的意义,并且只能视为用于说明特定实施例,并不限制本发明的意图。
45.在本说明书中,除非有特别的记载,否则单数视为包括复数。
46.另外,在记载某个部分“包括”某个构成要素时,意味着该部分还可以包括其他构成要素。
47.另外,在记载在某个构成要素“上”时,表示在该构成要素的上或者下,但并不意味着必须位于以重力方向为准的上侧。
48.另外,在记载某个构成要素“连接”或者“结合”其他构成要素时,不仅包括该构成要素直接连接或结合其他构成要素的情况,还包括该构成要素通过另一个构成要素间接连接或结合的情况。
49.另外,在说明某个构成要素时,可以使用第一、第二等术语,但这样的术语仅是为了将该构成要素与其他构成要素区分开,并不是要通过此术语限制该构成要素的本质或者次数或者顺序等。
50.图1是示出根据本发明的一个实施方式的智能魔方的立体图,图2是示出图1的分解立体图。
51.另外,在说明某个构成要素时,可以使用第一、第二等术语,但这样的术语仅是为了将该构成要素与其他构成要素区分开,并不是要通过此术语限制该构成要素的本质或者次数或者顺序等。
52.图1是示出根据本发明的一个实施例的智能魔方的立体图,图2是示出图1的分解
立体图。
53.参考图1和图2,根据本发明的一个实施例的智能魔方10可以包括主框架100和多个单元块200。
54.主框架100可以以球形构成,但不一定限于此。
55.多个单元块200可以结合于主框架100,并构成正六面体的各个面。
56.即,智能魔方10可以以正六面体形状构成,下文的正六面体在没有其他特别说明时,视为表示智能魔方10。
57.具体地,多个单元块200可以包括:配置于正六面体的各个面的中央的多个例如6个中心块210、配置于正六面体的各个面的棱角的多个例如12个棱块220;以及配置于正六面体的各个面的边角的多个例如8个角块230。
58.中心块210可以可旋转地结合于主框架100,棱块220可以被与该棱块220相邻的2个中心块210约束,角块230可以被与该角块230相邻的3个棱块220约束。
59.因此,多个中心块210、多个棱块220和多个角块230能够相互约束,使配置在正六面体的同一面的中心块210、棱块220和角块230能够一起旋转,这样的单元块200相互之间的结合结构是公知技术,因此省略对此的详细说明。
60.图3是示出图2的主框架的立体图。
61.参考图3,可以在主框架100的外周表面形成多个例如6个连接凸起110。
62.连接凸起110可以在主框架100的半径方向上延伸。
63.例如,一对连接凸起110可以沿x轴方向延伸,另一对连接凸起110可以沿垂直于x轴方向的y轴方向延伸,另外一对连接凸起110可以沿垂直于x轴和y轴方向的z轴方向延伸。
64.多个中心块210各自都能够可旋转地与多个连接凸起110的各个结合。
65.例如,连接凸起110可以以管状构成,中心块210可以具备插入到连接凸起110的旋转轴。
66.另外,连接凸起110可以插入到后述的构成旋转检测部的固定框架中,可以在连接凸起110的外周表面形成7字形状构成的连接槽110a,以防止固定框架的脱离和旋转。
67.图4是示出图2的中心块的立体图,5是示出图4的中心块的暴露面的示意图,图6是示出图4的中心块的相向面的示意图,图7是示出图2的棱块的立体图,图8是示出图7的棱块的相向面的示意图,图9是示出图7的棱块的另一个相向面的示意图,图10是示出图2的角块的立体图,图11是示出图10的角块的相向面的示意图。
68.参考图4至11,单元块200可以具备显示部240和多个端子250。
69.显示部240可以分别配置在单元块200的暴露于外部的暴露面。
70.显示部240可以包括配置在单元块200内的基板241、以及安装于基板241的发光元件243。
71.发光元件243,如后述,可以以根据传输到该显示部240的数据而决定的颜色或已设定的颜色发光,发光元件243生成的可见光可以通过形成单元块200的暴露面的透明窗照射到外部。
72.但是,并不一定限于此,显示部240还可以包括显示屏。
73.端子250可以在单元块200的与其他单元块200相向的单元块200的相向面分别配置多个,用于传输显示部240的电力和数据。
74.端子250可以包括配置在每一个相向面的一对电力端子250a和250b以及一对数据端子250c和250d。
75.一对电力端子250a和250b在单元块200和与该单元块200相邻的其他单元块200之间传输驱动显示部240所需的电力。
76.为此,一对电力端子250a和250b可以传输相互不同电位的电力。例如,第一电力端子250a可以传输正电位的电力,第二电力端子250b可以传输负电位的电力。
77.一对数据端子250c和250d在单元块200和与该单元块200相邻的其他单元块200之间传输控制显示部240所需的数据。
78.作为一例,配置在中心块210的相向面的一对数据端子250c和250d可以在中心块210的1个显示部240和在棱块220的与该显示部配置在正六面体的同一面的1个显示部240之间传输数据。
79.作为另一例,配置在棱块220的与角块230相向的相向面的一对数据端子250c和250d可以在棱块220的2个显示部240和在角块230的与这些显示部配置在正六面体的同一面的两个显示部240之间传输数据。具体地,第一数据端子250c可在棱块220的某一个显示部240和在角块230的与该显示部配置在正六面体的同一面的一个显示部240之间传输数据,第二数据端子250d可在棱块220的另一个显示部240和在角块230的与该显示部配置在正六面体的同一面的另一个显示部240之间传输数据。
80.图12是用于说明根据本发明的一个实施例的智能魔方的数据流的图。
81.参考图12,主框架100可以搭载控制单元120,控制单元120可以向多个中心块210的各个传输电力和数据。
82.为此,控制单元120可以通过电线等连接多个中心块210各自的显示部240。
83.控制单元120例如可以包括微控制单元(mcu,micro controller unit)。
84.控制单元120可以从用户终端等外部设备接收控制信号,并根据接收到的控制信号允许或切断对多个中心块210的电力供应、或者向多个中心块210的各个传输数据。
85.供应到多个中心块210的电力可以从搭载在主框架100的电池中获取。
86.传输到多个各中心块210的各个的数据可从上述的外部设备中获取或根据外部设备的控制信号从搭载在主框架100的数据库中加载。
87.多个中心块210接收的电力和数据中的一部分可以通过端子250传输到多个棱块220和多个角块230。
88.例如,可以在单元块200之间进行通过电力端子250a和250b的电力传输。
89.与此相对地,可以在显示部250之间进行通过数据端子250c和250d的数据传输。
90.具体地,显示部240之间的数据传输只能在配置于正六面体的同一面的显示部240之间进行,从中心块210的显示部240发出的数据,在经过配置于正六面体的与该中心块210的显示部240同一面的多个棱块220和多个角块230的所有显示部240后,到达该中心块210的显示部240。另外,除了最初接收来自中心块210的数据的棱块220之外的其余棱块220接收的数据在传输到角块230之前也可以经由中心块210。
91.为此,传输到多个中心块210的各个的数据不仅可以包括控制该中心块210的显示部240所需的数据,还可以包括控制配置于正六面体的与该中心块210的显示部240同一面的棱块220和角块230的显示部240所需的数据。此时,各个单元块200可以在接收的数据中
提取最初接收的一部分数据后,将剩余数据分流到下一个单元块200。
92.因此,由于使用者操作魔方改变显示部240各自的位置时,传输到多个中心块210的各个的数据需要针对显示部240各自的变更的位置再配置,对此后述。
93.图13是示出图2的单元块的端子的截面图,图14至图17是用于说明图13所示的端子的工作原理的图。
94.参考图13,可以在单元块200的相向面201形成插入孔203,端子250可以配置为能够从插入孔203内引出。
95.例如,端子250可以以棒状构成,并且可以以能够在端子250的长度方向滑动并从插入孔203内引出的方式与插入孔203结合。
96.另外,端子250可通过柔性电线(w)电连接到显示部240,以保证滑动时与显示部240的电连接。
97.另外,端子250还可以包括永久磁铁251,使端子250的引出端部侧磁极带有与端子250的插入端部侧磁极相反的极性。其中,端子250的引出端部和插入端部可以分别表示端子250的长度方向的两端,并且其中的引出端部可以表示向插入孔203的外部引出的端部。
98.永久磁铁251可以提供电力或数据传输通道,但不一定限于此。
99.例如,端子250还可以进一步包括导电层253,所述导电层253以包裹永久磁铁251的方式形成,并提供电力或数据传输通道。此时,柔性电线(w)可以直接结合到导电层253,由此电力和数据传输可能会更加顺畅。
100.参考图14至图17,永久磁铁251可使该端子250的引出端部侧磁极带有与其他单元块200的端子250的引出端部侧磁极相反的极性,以便该端子250通过磁力从插入孔203中引出并接合于其他单元块200的端子250。例如,该端子250的引出端部侧磁极可以是n极,应接合于该端子250的其他单元块200的端子250的引出端子侧磁极可以是s极。
101.另一方面,一对单元块200的相向面201可以相互隔离配置。
102.因此,可以减少使用者操作魔方时的单元块200之间的摩擦阻力。
103.另外,配置于同一相向面201的一对电力端子250a和250b的引出端部侧磁极可以带有相反的极性。例如,在一个单元块200的相向面201配置的第一电力端子250a和第二电力端子250b中,第一电力端子250a的引出端部侧磁极可以是n极,第二电力端250b的引出端部侧磁极可以是s极。
104.与此相反,配置在另一个单元块200相对的相向面201的第一电力端子250a和第二电力端子250b中,第一电力端子250a的引出端部侧磁极可以是s极,第二电力端子250b的引出端部侧磁极可以是n极。
105.因此,在一对单元块200中,一对第一电力端子250a可以通过磁力引力相互接合,一对第二电力端子250b可以通过磁力引力相互接合,但可以通过磁力斥力防止第一电力端子250a接合于第二电力端子250b而获取不同电位的电力。
106.特别是,随着智能魔方10的大小变小,第一电力端子250a和第二电力端子250b的移动或旋转路径重叠的可能性会变大,在这种情况下,可以为防止第一电力端子250a和第二电力端子250b之间的接触做出贡献。
107.同样地,配置于同一相向面201的一对数据端子250c和250d的引出端部侧磁极可以带有彼此相反的极性。
108.参考图14,在一个单元块200停止的状态下旋转另一个单元块200并靠近停止的单元块200时,停止的单元块200的第一电力端子250a和旋转的单元块200的第二电力端子250b可以通过磁力斥力最大限度地插入到插入孔203内。
109.参考图15,当图14的旋转的单元块200继续旋转使旋转的单元块200的第一电力端子250a接近停止的单元块200的第一电力端子250a时,停止的单元块200的第一电力端子250a和旋转的单元块200的第一电力端子250a可以通过磁力引力从插入孔203中引出。
110.此时,在端子250的引出端部侧的棱角部分可以形成倒圆角部255,减少端子250之间的冲突产生的摩擦阻力。
111.特别是,在插入孔203的内周表面可以形成限制端子250的最大引出长度的限位凸起205,限位凸起205可以使停止的单元块200的端子250和旋转的单元块200的端子250在通过磁力引力引出到最大引出长度时,在倒圆角部255相互接触。
112.参照图16,当图15的旋转的单元块200继续旋转使旋转的单元块200的第一电力端子250a与停止的单元块200的第一电力端子250a对齐时,第一电力端子250a可以通过磁力引力相互接合。
113.参考图17,当图16的旋转的单元块200继续旋转使旋转的单元块200的第一电力端子250a靠近停止的单元块200的第二电力端子250b时,停止的单元块200的第二电力端子250b与旋转的单元块200的第一电力端子250a通过磁力斥力最大限度地插入到插入孔203内。
114.图18是示出旋转检测部的分解立体图,图19是示出图18的圆环的平面图,图20是示出图18的固定框架的平面图,图21是用于说明图18的圆环和光遮挡中断传感器之间的配置关系的图。
115.参考图18至图21,智能魔方10还可以包括检测多个中心块210各自的旋转方向和旋转角度的多个旋转检测部300。
116.旋转检测部300可以包括固定框架310、圆环320以及一对光遮挡中断传感器330。
117.固定框架310结合于主框架100,即使中心块210旋转也能够维持停止状态。
118.例如,在固定框架310的中央可以形成供主框架100的连接凸起110插入的连接孔310a,在连接孔310a的内周表面可以形成插入到形成于连接凸起110的外周表面的连接槽110a的脱离防止凸起。
119.另外,固定框架310的下部可以与弹簧例如螺旋弹簧结合,所述弹簧例如螺旋弹簧被相邻的一对棱块220支撑,并通过弹力将固定框架310向中心块210方向按压,使得脱离防止凸起固定于7字形状的连接槽110a的端部。
120.圆环320结合于中心块210并与中心块210一起旋转。
121.为此,圆环320可以具备结合中心块210的插入凸起320a。
122.圆环320可以构成为圆心配置在中心块210的旋转轴(c)的圆形。
123.圆环320可以具备在半径方向上贯穿圆环320的4个感应孔320b,4个感应孔320b以中心块210的旋转轴(c)为中心以90度间隔配置。即,2个相邻的感应孔320b之间的第一角度(α)可以是90度。
124.一对光遮挡中断传感器330可以分别结合于固定框架310,并且可以以中心块210的旋转轴(c)为中心、以小于或大于180度的间隔配置。
125.例如,第一光遮挡中断传感器330a和第二光遮挡中断传感器330b之间的第二角度(β)可以小于180度。
126.光遮挡中断传感器330可以包括配置于圆环320的内侧和外侧的光发射部331和光接收部333。光发射部331可以配置于圆环320内侧,光接收部333可以配置于圆环320外侧,但不一定限于此。
127.光发射部331和光接收部333可以配置为在圆环320的半径方向上相向。
128.因此,由于圆环320与中心块210一起旋转,因此当圆环320的感应孔320b配置于光发射部331和光接收部333之间时,光遮挡中断传感器330可以生成检测信号。
129.所述旋转检测部300能够以一对光遮挡中断传感器330生成的检测信号的顺序和次数为基础检测出中心块210的旋转方向和旋转角度。
130.作为一例,在将图21的配置状态的中心块210向顺时针方向旋转90度时,在第二光遮挡中断传感器330b生成检测信号之后,第一光遮挡中断传感器330a可以生成检测信号,在图21的配置状态的中心块210向逆时针方向旋转90度时,在第一光遮挡中断传感器330a生成检测信号之后,第二光遮挡中断传感器330b可以生成检测信号。因此,中心块210的旋转方向可以根据首先生成检测信号的光遮挡中断传感器330的种类决定。
131.作为另一例,在中心块210每以顺时针方向或者逆时针方向旋转90度时,第一光遮挡中断传感器330a和第二光遮挡中断传感器330b可以分别生成一次检测信号。因此,中心块210的旋转角度可以根据某一个光遮挡中断传感器330生成的检测信号的次数决定。
132.另一方面,控制单元120可以以显示部240各自的最初位置和多个旋转检测部300的检测结果为基础计算显示部240各自的最终位置。
133.另外,控制单元120可以将操作魔方前的数据针对显示部240各自的最终位置再配置的数据传输到多个中心块210的各个。
134.图22和图23是用于说明图12的控制单元计算显示部各自的最终位置的原理或算法的图。
135.参考图22,可以给各显示部240指定任意的地址值。
136.例如,可以给配置在智能魔方10的各个面的中央的显示部240指定区分各个面的地址值,即f(前面,front surface),b(后面,back surface),l(左侧面,left side surface),r(右侧面,right side surface),u(上面,upper surface),d(下面,down surface),给剩余的显示部240指定从1开始依次不同数字的地址值。
137.图22是以智能魔方10的旋转面为中心展开以全部看到智能魔方10各个面的智能魔方10的图,用于容易识别指定给各显示部240的地址值。
138.然后,智能魔方10的旋转面旋转时,显示部240的位置发生改变的是a部分,因此,若可以利用如下述数学式1那样表示a部分旋转前后的显示部240的配置的矩阵求得s矩阵,则之后可以利用s矩阵计算出显示部240各自的最终位置。
139.【数学式1】
140.141.另一方面,在上述数学式1中表示显示部240的配置的矩阵中,中心和各边角的值可以用零(zero)来表示,数学式1中表示旋转后的显示部240的配置的矩阵可以以旋转面以顺时针方向旋90度的情况为例。
142.参考图23,可以如上所述给各显示部240指定任意的地址值。
143.然后,旋转面的中心即以贯穿f的横轴为x轴,贯穿f的竖轴为y轴、显示部240各自的位置和地址值可以用下面数学式2的矩阵表示。
144.【数学式2】
[0145][0146]
然后,旋转魔方10的旋转转面时,显示部240的位置发生改变的是a部分,如上述数学式2,将表示a部分的各显示部240的位置和地址值的矩阵代入数学式3中,可以求得表示各显示部240的最终位置和地址值的矩阵。其中,θ可以表示旋转面以逆时针方向旋转的角度。
[0147]
【数学式3】
[0148][0149]
作为一例,地址值是11的显示部240的x坐标和y坐标分别是-2和1,假设旋转面以顺时针方向旋转了90度,则由于θ是-90度,因此将该值代入上述数学式3中,可以算出地址值为11的显示部240的最终x坐标和y坐标分别是1和2。
[0150]
作为另一例,地址值为11的显示部240的x坐标和y坐标分别是-2和1,假设旋转面以逆时针方向旋转了90度,则由于θ是90度,因此将该值代入上述数学式3中,可以算出地址值为11的显示部240的最终x坐标和y坐标分别是-1和-2。
[0151]
作为又一例,地址值为11的显示部240的x坐标和y坐标分别是-2和1,假设旋转面以逆时针方向或顺时针方向旋转了180度,则由于θ是-180度或180度,因此将该值代入上述数学式3中,可以算出地址值为11的显示部240的最终x坐标和y坐标分别是2和-1。
[0152]
以上以本发明的优选实施例为中心进行了说明,但这仅是示例,并不是限定本发明。本发明所属技术领域的普通技术人员可以在不脱离权利要求中所记载的本发明的范围内,通过构成要素的附加、变更、删除或追加对实施例进行各种修改和变更,并且这也包括在本发明的权利范围内。
[0153]
附图标记
[0154]
10:智能魔方
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100:主框架
[0155]
110:连接凸起
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110a:连接槽
[0156]
120:控制单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:单元块
[0157]
201:相向面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203:插入孔
[0158]
210:中心块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220:棱块
[0159]
230:角块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
240:显示部
[0160]
241:基板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
243:发光元件
[0161]
250:端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250a:第一电力端子
[0162]
250b:第二电力端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250c:第一数据端子
[0163]
250d:第二数据端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251:永久磁铁
[0164]
253:导电层
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
255:倒圆角部
[0165]
300:旋转检测部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310:固定框架
[0166]
310a:连接孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:圆环
[0167]
320a:插入凸起
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320b:感应孔
[0168]
330:光遮挡中断传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
330a:第一光遮挡中断传感器
[0169]
330b:第二光遮挡中断传感器
ꢀꢀꢀꢀꢀꢀ
331:光发射部
[0170]
333:光接收部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1