一种儿童玩具车上的挖臂联动应用方法与流程
一种儿童玩具车上的挖臂联动应用方法
1.技术领域:本发明涉及采用电动机驱动的骑乘类的儿童玩具车,尤其是的骑乘类的儿童电动工程车,儿童电动挖掘机,儿童电动铲车,儿童电动叉车等,通过控制可以旋转活动的电动臂来进行作业的玩具车。
2.
背景技术:
目前:市面上销售的骑乘类儿童电动玩具车,儿童电动工程车,儿童电动挖掘机,儿童电动铲车,儿童电动叉车等,尤其是儿童电动挖掘机在完成挖掘,抬升,下降,倾倒等动作时,需要工程车大臂和小臂,挖斗,及其关节,旋转,相互配合,来完成连贯动作;市场上的产品采用的方法为:第1种挖斗和小臂固定在一起;第2种大臂和车体公用一个电动驱动齿轮箱,小臂和挖斗公用一个电动驱动齿轮箱;第1种的缺点是:挖斗不能旋转,大臂带动小臂抬升下降,动作僵硬,不能携带砂土,犹如斧头砍地一样,不能实现挖机的挖土动作,可玩性极低;第2种,需要两个电动驱动齿轮箱,需要两套可以独立操控的线路来分别操控这两个电动驱动齿轮箱;成本增加,且两个通过两个独立操控的线路来控制挖臂的动作相互配合,对于儿童来说操作难度大比较困难;并且手动驱动的挖臂,儿童一手控制车体,一手控制大臂升降,小臂和挖斗不可控制,只能做成一体;这样又和第1种方法一样,动作坚硬,可玩性差;还没有一种可以用在儿童电动挖机车上的,通过一个驱动端来实现操控挖臂各个环节的方法。
3.
技术实现要素:
本发明提供了一种儿童玩具车上的挖臂联动应用方法,即:挖斗通过可旋转的轴固定在小臂上,小臂通过可旋转的轴固定在大臂上,大臂通过可旋转的轴固定在车体上;驱动端位于大臂上,通过驱动两个控制端,分别控制大臂和车体之间的活动关节,小臂和大臂之间的活动关节;转盘位于大臂和小臂的连接处,小臂旋转驱动转盘,转盘通过拉杆驱动挖斗旋转;还可进一步为:驱动挖斗旋转的拉杆的一端直接固定大臂上,通过大臂和小臂的角度变化,拉杆两端位于大臂和挖斗位置产生距离差,来拉动挖斗进行旋转;手动的挖臂结构,大臂和车体之间通过弹簧来平衡挖臂的重量,大臂上有一扶手便于儿童抬升大臂,大臂上有一拉杆操控整个挖臂,即如上,拉杆驱动小臂旋转,小臂驱动转盘和挖斗旋转。
4.技术方案:本实发明的优选技术方案1是: 电动齿轮箱驱动款:包括车体,大臂,小臂,挖斗,电动驱动齿轮箱,起重杆,摆片,拉杆1,拉杆2,转盘,反转杠杆,限位体1,限位体2,驱动体,传动体等;具体位置关系为:大臂通过旋转轴固定车体上,并可以围绕旋转轴旋转,小臂通过旋转轴固定在大臂上,并可以围绕旋转轴旋转一定角度,挖斗通过旋转轴固定在小臂上,并可以围绕旋转轴旋转一定角度;电动驱动齿轮箱固定在大臂内,通过起重杆连接车体,通
过拉杆1连接小臂;转盘固定在大臂和小臂的连接处,与大臂和小臂的旋转轴同心,通过拉杆2连接挖斗;转盘上有限位体1和大臂限位体2对应,传动体和杠杆件对应;杠杆件固定在大臂的转轴上,并可以围绕转轴旋转;大臂上有限位体2与转盘上的限位体1对应,小臂上有与杠杆件对应的驱动体;挖斗和小臂之间有阻尼体,使挖斗和小臂保持相对位置。
5.相互作用为:挖臂下降挖土时,带动驱动齿轮箱反向旋转,作用起重杆下降的同时,通过摆片和拉杆1,驱动小臂逆时针旋转,小臂旋转时带动挖斗和拉杆旋转,并拉动转盘旋转;小臂下降到一定角度接近地面时,转盘的限位体1和大臂上的限位体2相作用,使转盘不能旋转,进而固定拉杆2的转盘端,小臂继续旋转下降,由于距离差,拉杆2的挖斗端拉动挖斗向内旋转,进行挖掘沙土;抬升挖臂时,电动驱动齿轮箱正向旋转驱动起重杆抬升大臂的同时,通过摆片和拉杆1,驱动小臂顺时针旋转,挖斗在阻尼件的作用下,保持挖掘状态,携带沙土上升,小臂向上旋转时,拉杆2在阻尼件和沙土重量的作用下,推动转盘顺势正旋转,使限位体1和限位体2分离;小臂抬升至一定角度,小臂上的驱动体通过杠杆件作用转盘上的传动体,使转盘高速反向旋转,驱动拉杆2时挖斗反向旋转,进而倾倒挖斗内的沙土。
6.本实发明的优选技术方案2是: 手动驱动款:包括车体,大臂,小臂,挖斗,扶手,弹簧,手动杆,拉杆1,拉杆2,转盘,反转杠杆,限位体1,限位体2,驱动体,传动体等;具体位置关系为:大臂通过旋转轴固定车体上,并可以围绕旋转轴旋转,小臂通过旋转轴固定在大臂上,并可以围绕旋转轴旋转一定角度,挖斗通过旋转轴固定在小臂上,并可以围绕旋转轴旋转一定角度;扶手位于大臂外壁,手动杆和弹簧固定在大臂内,大臂通过弹簧连接车体,手动杆可以旋转通过拉杆1连接小臂;转盘固定在大臂和小臂的连接处,与大臂和小臂的旋转轴同心,通过拉杆2连接挖斗;转盘上有限位体1和大臂限位体2对应,传动体和杠杆件对应;杠杆件固定在大臂的转轴上,并可以围绕转轴旋转;大臂上有限位体2与转盘上的限位体1对应,小臂上有与杠杆件对应的驱动体;挖斗和小臂之间有阻尼体,使挖斗和小臂保持相对位置。
7.相互作用为:挖臂下降挖土时,按压大臂上的扶手下降大臂,拉动手动杆通过摆片和拉杆1,驱动小臂逆时针旋转,小臂下降到一定角度接近地面时,转盘的限位体1和大臂上的限位体2相作用,使转盘不能旋转,进而固定拉杆2的转盘端,小臂继续旋转下降,由于距离差,拉杆2的挖斗端拉动挖斗向内旋转,进行挖掘沙土;抬升挖臂时,大臂在弹簧作用力下缓缓抬升,驱动手动杆通过摆片和拉杆1,驱动小臂顺时针旋转;挖斗在阻尼件的作用下,保持挖掘状态,携带沙土上升,小臂向上旋转时,拉杆2在阻尼件和沙土重量的作用下,推动转盘顺势正旋转,使限位体1和限位体2分离;小臂抬升至一定角度,小臂上的驱动体通过杠杆件作用转盘上的传动体,使转盘高速反向旋转,驱动拉杆2时挖斗反向旋转,进而倾倒挖斗内的沙土。
8.有益效果:采用本结构,不仅减掉一个驱动齿轮箱和控制线路,节约成本,同时将原本操控两个电路,通过两个电机驱动齿轮箱配合完成的挖掘,抬升,下降,倾倒等复杂动作,通过只需控制一个电机驱动齿轮箱的一个电路来完成,简单到一个按钮,或者一个拉杆,适合幼儿,
儿童操作。
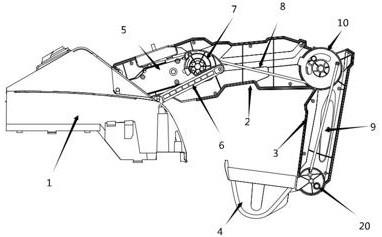
9.为便于审查员理解,下面结合附图和实施例对发明进一步说明:附图说明:一种儿童电动工程挖机上的挖臂结构图1为:电动驱动齿轮箱版挖臂左视图。图2:电动驱动齿轮箱版挖臂右视图,图3:大臂图,图4:小臂图,图5:挖斗图,图:6转盘图,图7:杠杆件图图8:电动驱动齿轮箱图,9:摆片图,10:拉杆图,11:弹簧图12:手动杆图,13阻尼件组图,14手动版挖臂主视图。
10.图示:1:车体,2:大臂,3:小臂,4:挖斗,5:电动驱动齿轮箱,6:起重杆,7:摆片,8:拉杆1,9:拉杆2,10:转盘,11:杠杆件,12:限位体1,12:限位体2,13:驱动体14传动体,15转轴,16拉杆孔,17弹簧,18手动杆,19扶手,20阻尼体21阻尼弹子。
11.本实施列为:大臂抬升55度,小臂抬升70度,挖斗旋转120度,驱动电动驱动齿轮箱采用9000转/分钟的5瓦高速小电机,和四级减速比为400:1的齿轮箱;拉杆采用直径为5毫米的铁杆。
12.如图1至图14所示:方案1是:电动齿轮箱驱动款,位置关系如图1和图2所示:大臂2通过旋转轴15固定车体1上,并可以围绕旋转轴15旋转55度,小臂3通过旋转轴15固定在大臂2上,并可以围绕旋转轴15旋转70度,挖斗4通过旋转轴15固定在小臂3上,并可以围绕旋转轴15旋转120度;电动驱动齿轮箱5固定在大臂2内,通过摆片7连接起重杆6连接车体1,和拉杆1连接小臂3;转盘10固定在大臂2和小臂3的连接处,与大臂和小臂的旋转轴15同心,通过拉杆2连接挖斗4;转盘10上有限位体1和大臂限位体2对应,传动体14和杠杆件11对应;杠杆件11固定在大臂2的转轴15上,并可以围绕转轴旋转;大臂上有限位体2与转盘上的限位体1对应,小臂上有与杠杆件11对应的驱动体13。相互作用为:挖臂下降挖土时,电动驱动齿轮箱5反向旋转115度,带动起重杆6下降的同时,通过摆片7和拉杆1,驱动小臂3逆时针旋转;小臂3旋转时带动挖斗4和拉杆2旋转,并拉动转盘10旋转,小臂3下降到30度接近地面时,转盘10的限位体1和大臂2上的限位体2相作用,使转盘10不能旋转,进而固定拉杆2的转盘端拉杆孔位,小臂继续旋转下降,由于距离差,拉杆2的挖斗端拉动挖斗4向内旋转120度,进行挖掘沙土;抬升挖臂时,电动驱动齿轮箱5正向旋转120度,通过摆片7和拉杆1,驱动起重杆6抬升大臂2抬升55度的同时,驱动小臂3顺时针旋转,小臂3抬升至60度时;大臂2抬升时,挖斗4在阻尼件21的作用下,保持挖掘状态,携带沙土上升,小臂3向上旋转时,拉杆2在阻尼件和沙土重量的作用下,推动转盘顺势正旋转,使限位体1和限位体2分离;小臂3旋转至65度角时,小臂上的驱动体13通过杠杆件11作用转盘10上的传动体14,使转盘10高速反向旋转,驱动拉杆2时挖斗4反向旋转90,进而倾倒挖斗4内的沙土。
13.方案2是:位置关系如图14所示:手动驱动款,大臂通过旋转轴固定车体上,并可以围绕旋转轴旋转,小臂通过旋转轴固定在大臂上,并可以围绕旋转轴旋转一定角度,挖斗通过旋转轴固定在小臂上,并可以围绕旋转轴旋转一定角度;扶手位于大臂外壁,手动杆和弹簧固定在大臂内,大臂通过弹簧连接车体,手动杆可以旋转通过拉杆1连接小臂;转盘固定在大臂和小臂的连接处,与大臂和小臂的旋转轴同心,通过拉杆2连接挖斗;转盘上有限位体1和大臂限位体2对应,传动体和杠杆件对应;杠杆件固定在大臂的转轴上,并可以围绕转
轴旋转;大臂上有限位体2与转盘上的限位体1对应,小臂上有与杠杆件对应的驱动体。
14.相互作用为:抬升挖臂时,大臂在弹簧作用力下缓缓抬升,驱动手动杆通过摆片和拉杆1,驱动小臂顺时针旋转;小臂抬升至一定角度,小臂上的驱动体通过杠杆件作用转盘上的传动体,使转盘高速反向旋转,驱动拉杆2时挖斗反向旋转,进而倾倒挖斗内的沙土;挖臂下降挖土时,按压大臂上的扶手下降大臂,拉动手动杆通过摆片和拉杆1,驱动小臂逆时针旋转,小臂下降到一定角度接近地面时,转盘的限位体1和大臂上的限位体2相作用,使转盘不能旋转,进而固定拉杆2的转盘端,小臂继续旋转下降,由于距离差,拉杆2的挖斗端拉动挖斗向内旋转,进行挖掘沙土。
15.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1