一种下棋机器人及其实现方法与流程
1.本发明涉及机器视觉技术领域,尤其是一种下棋机器人及其实现方法。
背景技术:
2.随着科技的进步与发展,越来越多的高校和科研机构开始重视研究学习人工智能设备,机器人教学作为机器视觉检测技术以及机器人技术作为智能制造生产的重要应用,在高等院校的教学计划中得到了广泛的应用,使用机器视觉技术代替人工进行工件的识别、定位等,能够极大地深化学生对于机器视觉的理解,采用下起对弈系统,通过深度学习,代替人工进行对弈,能够在很大程度上节省人力成本,将机器视觉检测技术与机器人技术结合的教学装置,在操作上实现了更高程度的智能化,理论与实践相结合,既可以在教学演示中能够让学生更加清晰直观的观摩学习,同时又能锻炼学生的动手能力。
技术实现要素:
3.为了实现上述检测装置,本发明提出一种下棋机器人及其实现方法,该设备在教学演示中能够让学生更加清晰直观的观摩和学习,锻炼学生的动手能力,结构简单,占用空间小,便于调节安装及维护,适应多种教学场合。
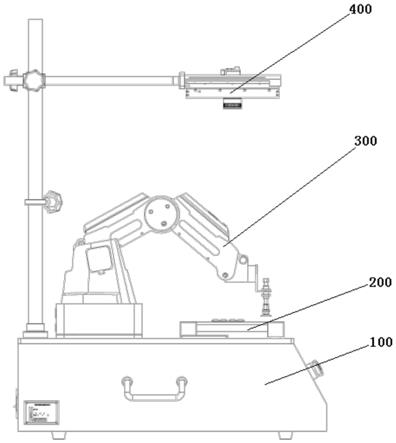
4.本发明公开的一种下棋机器人,其采用的技术方案是:一种下棋机器人,包含:载物平台组件(100)、棋盘模块(200)、机械臂组件(300)、机器视觉组件(400)和控制系统;
5.所述的棋盘模块(200)、机械臂组件(300)、机器视觉组件(400)安装在载物平台组件(100)上方,棋盘模块(200)安装在前侧中央,机械臂组件(300)安装在中间,机器视觉组件(400)安装在后侧中央,所述的机械臂组件(300)安装在机器视觉组件(400)下部;
6.所述的载物平台组件(100)包括载物平台(110)、载物平台箱体(120),所述的载物平台(110)安装在载物平台箱体(120)上部;
7.所述的棋盘模块(200)包括棋盘组件(210)、棋子放置工件(220),所述的棋盘组件(210)、棋子放置工件(220)安装在载物平台组件(100)上方,所述的棋子放置工件(220)位于棋盘组件(210)的两侧,呈对称分布;
8.所述的机械臂组件(300)包括机械臂(310)、吸嘴组件(320),所述的吸嘴组件(320)安装在机械臂(310)的前端,所述的吸嘴组件(320)包含吸嘴固定板(321)、吸嘴(322),所述的吸嘴(322)安装在吸嘴固定板(321)上,所述的吸嘴固定板(321)安装在机械臂(310)前端;
9.所述的机器视觉组件(400)包括立柱(410)、视觉组件安装架(420)、工业相机(430)、条形光源(440),所述的视觉组件安装架(420)安装在立柱(410)上端,所述的工业相机(430)和条形光源(440)安装在视觉组件安装架(420)上;
10.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的控制系统包括计算机、视觉图像处理分析系统、下棋对弈系统、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的视觉图像处理分析系统、下棋对弈系统为计算机的系统软件,所述的计算
机连接、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的光源控制器连接光源,所述的机械臂控制器连接机械臂(310),抓取组件控制电子阀连接吸嘴;
11.所述的下棋对弈系统,先通过视觉图像处理分析系统获取到对方落子位置信息,再将对方落子位置信息与预设己方落子数据库进行对比分析,根据对比分析结果匹配最佳落子位置方案,并通过训练数据,优化己方落子位置方案,达到深度学习的效果。
12.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的载物平台箱体(120)包括放置完成按钮(121)、正光源按钮(122)、背光源按钮(123)、启动按钮(124)、复位按钮(125)、急停按钮(126)、把手(127),所述的放置完成按钮(121)在载物平台箱体(120)前侧,位于正光源按钮(122)左侧,正光源按钮(122)在背光源按钮(123)左侧,背光源按钮(123)在启动按钮(124)左侧,启动按钮(124)在复位按钮(125)左侧,复位按钮(125)在急停按钮(126)左侧,所述的把手(127)安装在载物平台箱体(120)左右两侧。
13.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的棋盘组件(210)包含棋盘载物台(211)、棋盘载物台底座(212)、背光源(213),所述的棋盘载物台(211)安装在棋盘载物台底座(212)上,所述的棋盘载物台底座(212)有四个,分别安装在背光源(213)两侧的四角位置。
14.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的视觉组件安装架(420)包括视觉组件固定块(421)、前后调节杆(422)、升降定位螺栓(423)、前后定位螺栓(424)、光源调节板(425)、光源左右调节螺栓(426)、相机固定板(427)、光源固定板(428),所述的视觉组件固定块(421)通过中间的圆孔套装在立柱(410)顶端,所述的升降定位螺栓(423)安装在视觉组件固定块(421)后侧,所述的前后定位螺栓(424)安装在视觉组件固定块(421)左右两侧,所述的前后调节杆(422)有两根,两根调节杆相互平行,先横向穿过视觉组件固定块(421)两端的两个圆孔,再横向穿过光源调节板(425)两侧的两个圆孔,安装在相机固定板(427)上,所述的光源左右调节螺栓(426)安装在光源调节板(425)后侧两端的滑道内,所述的光源固定板(428)安装在光源调节板(425)前侧两端,光源左右调节螺栓(426)安装在光源固定板(428)上。
15.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的棋盘载物台(211)为半透明的亚克力材质。
16.作为本发明公开的一种下棋机器人的一种优选实施方式:所述的棋子工件上下面均采用平面结构设计。
17.本发明还公开了一种下棋机器人的实现方法,其采用任一上述的下棋机器人执行如下步骤:
18.步骤(1):人工在棋盘上放置一枚棋子,按下“放置完成”按钮;
19.步骤(2):“放置完成”按钮按下,触发视觉系统对棋盘当前状态拍照;
20.步骤(3):图像处理软件获取人工所下棋子的坐标位置信息;
21.步骤(4):将获取到的棋子当前坐标信息,传输给下棋对弈系统软件;
22.步骤(5):下棋对弈软件经分析计算得到最优下棋方案;
23.步骤(6):将最优下棋方案的坐标发送给机械臂控制器;
24.步骤(7):机械臂控制器控制机械臂抓取并放置棋子,完成下棋对弈。
25.本发明的有益效果:
26.本发明一种下棋机器人及其实现方法,由载物平台组件、棋盘模块、机械臂组件、机器视觉组件和控制系统构成,所述的棋盘模块、机械臂组件、机器视觉组件安装在载物平台组件上方,棋盘模块安装在前侧中央,机械臂组件安装在中间,机器视觉组件安装在后侧中央,所述的机械臂组件安装在机器视觉组件下部,所述的棋盘模块用于摆放棋子工件,所述的机械臂组件用于精准抓取和放置棋子工件,所述的机器视觉组件代替人工完成棋子工件颜色、位置的识别,该装置结构简单,模块高度集成化,通过深度学习使机械臂最终实现对弈的智能化,设备体积小巧,占用空间少,便于调节安装及维护,还能让学生自主编程,可适应多种教学科研场合的优点。
27.所述的实现步骤为:
28.步骤1:人工在棋盘上放置一枚棋子,按下“放置完成”按钮;
29.步骤2:“放置完成”按钮按下,触发视觉系统对棋盘当前状态拍照;
30.步骤3:图像处理软件获取新放棋子的坐标位置;
31.步骤4:将获取到的棋子当前坐标信息,传输给下棋对弈系统软件;
32.步骤5:下棋对弈软件经分析计算得到最优下棋方案;
33.步骤6:将最优下棋方案的坐标发送给机械臂控制器;
34.步骤7:机械臂控制器控制机械臂抓取并放置棋子,完成下棋对弈。
35.本发明一种下棋机器人及其实现方法,所述的下棋对弈软件使用了一种深度学习的方法,采集双方对弈时的数据作为样本数据,通过下棋对弈软件的深度学习模块分析计算输出最优落子策略,通过深度学习机械臂可以更加智能和高效地完成下棋动作,极大地提升了教学效率。
36.本发明一种下棋机器人及其实现方法,所述的载物平台箱体包括放置完成按钮、正光源按钮、背光源按钮、启动按钮、复位按钮、急停按钮、把手,所述的放置完成按钮在载物平台箱体前侧,位于正光源按钮左侧,正光源按钮在背光源按钮左侧,背光源按钮在启动按钮左侧,启动按钮在复位按钮左侧,复位按钮在急停按钮左侧,所述的把手安装在载物平台箱体左右两侧,便于移动和搬运。
37.本发明一种下棋机器人及其实现方法,所述的棋盘组件包含棋盘载物台、棋盘载物台底座、背光源,所述的棋盘载物台安装在棋盘载物台底座上,所述的棋盘载物台底座有四个,分别安装在背光源两侧的四角位置,所述的背光源安装在载物平台组件上方前侧,面积略大于棋盘载物台的棋盘格范围,背光源自底向上打光时,光线可透过棋盘载物台,便于相机识别棋盘范围及棋子工件的边缘轮廓和颜色,方便机械臂进一步抓取放置棋子工件。
38.本发明一种下棋机器人及其实现方法,所述的视觉组件安装架包括视觉组件固定块、前后调节杆、升降定位螺栓、前后定位螺栓、光源调节板、光源左右调节螺栓、相机固定板、光源固定板,所述的视觉组件固定块通过中间的圆孔套装在立柱顶端,所述的升降定位螺栓安装在视觉组件固定块后侧,所述的前后定位螺栓安装在视觉组件固定块左右两侧,所述的前后调节杆有两根,两根调节杆相互平行,先横向穿过视觉组件固定块两端的两个圆孔,再横向穿过光源调节板两侧的两个圆孔,安装在相机固定板上,所述的光源左右调节螺栓安装在光源调节板后侧两端的滑道内,所述的光源固定板安装在光源调节板前侧两端,光源左右调节螺栓安装在光源固定板上,所述的升降定位螺栓用于调节视觉组件安装架在立柱上的升降位置,前后定位螺栓用于调节前后调节杆相对于立柱前后位置,光源左
右调节螺栓用于调节条形光源的俯仰角度和左右位置,即条形光源相对于工业相机的远近,这种结构将工业相机与条形光源固定在同一支架上,保证相机和光源在调整时始终处于统一高度,通过调整左右、前后位置,条形光源安装在准确位置且视场范围始终为最优状态,通过升降调节保证合适的物距,使工业相机采集到的图像精度更高。
39.本发明一种下棋机器人及其实现方法,所述的棋盘载物台为半透明的亚克力材质,这种亚克力的材质,重量轻,方便拆装和更换。
40.本发明一种下棋机器人及其实现方法,所述的棋子工件上下面均采用平面结构设计,相较于普通表面有弧度的棋子,在抓取放置过程中与吸嘴接触更加牢固,不易滑落。
附图说明
41.图1为本发明提出的一种下棋机器人及其实现方法的侧视图;
42.图2为本发明提出的一种下棋机器人及其实现方法的三维结构示意图;
43.图3为本发明提出的一种下棋机器人及其实现方法的视觉组件安装架示意图;
44.图4为本发明提出的一种下棋机器人及其实现方法的控制系统流程图。
45.附图标记说明
46.100
‑
载物平台组件,110
‑
载物平台,120
‑
载物平台箱体,121
‑
放置完成按钮,122
‑
正光源按钮,123
‑
背光源按钮,124
‑
启动按钮,125
‑
复位按钮,126
‑
急停按钮,127
‑
把手,200
‑
载物平台组件,210
‑
棋盘组件,211
‑
棋盘载物台,212
‑
棋盘载物台底座,213
‑
背光源,220
‑
棋子放置工件,300
‑
机械臂组件,310
‑
机械臂,320
‑
吸嘴组件,321
‑
吸嘴固定板,322
‑
吸嘴,400
‑
机器视觉组件,410
‑
立柱,420
‑
视觉组件安装架,421
‑
视觉组件固定块,422
‑
前后调节杆,423
‑
升降定位螺栓,424
‑
前后定位螺栓,425
‑
光源调节板,426
‑
光源左右调节螺栓,427
‑
相机固定板,428
‑
光源固定板,430
‑
工业相机,440
‑
条形光源。
具体实施方式
47.下面结合附图及实施例描述本发明具体实施方式:
48.需要说明的是,本说明书所附图中示意的结构,比例,大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,任何结构的修饰,比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
49.同时,本说明书中所引用的如“上”,“下”,“左”,“右”,“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
50.如图1~4所示,其示出了本发明的具体实施方式;本发明公开的一种下棋机器人及其实现方法,包括:载物平台组件100、棋盘模块200、机械臂组件300、机器视觉组件400、控制系统;
51.所述的棋盘模块200、机械臂组件300、机器视觉组件400安装在载物平台组件100上方,棋盘模块200安装在前侧中央,机械臂组件300安装在中间,机器视觉组件400安装在后侧中央,所述的机械臂组件300安装在机器视觉组件400下部;
52.所述的载物平台组件100包括载物平台110、载物平台箱体120,所述的载物平台
110安装在载物平台箱体120上部;
53.所述的棋盘模块200包括棋盘组件210、棋子放置工件220,所述的棋盘组件210、棋子放置工件220安装在载物平台组件100上方,所述的棋子放置工件220位于棋盘组件210的两侧,呈对称分布;
54.所述的机械臂组件300包括机械臂310、吸嘴组件320,所述的吸嘴组件320安装在机械臂310的前端,所述的吸嘴组件320包含吸嘴固定板321、吸嘴322,所述的吸嘴322安装在吸嘴固定板321上,所述的吸嘴固定板321安装在机械臂310前端;
55.所述的机器视觉组件400包括立柱410、视觉组件安装架420、工业相机430、条形光源440,所述的视觉组件安装架420安装在立柱410上端,所述的工业相机430和条形光源440安装在视觉组件安装架420上;
56.作为本发明公开的一种下棋机器人的优选实施例:所述的控制系统包括计算机、视觉图像处理分析系统、下棋对弈系统、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的视觉图像处理分析系统、下棋对弈系统为计算机的系统软件,所述的计算机连接、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的光源控制器连接光源,所述的机械臂控制器连接机械臂(310),抓取组件控制电子阀连接吸嘴;
57.所述的下棋对弈系统,先通过视觉图像处理分析系统获取到对方落子位置信息,再将对方落子位置信息与预设己方落子数据库进行对比分析,根据对比分析结果匹配最佳落子位置方案,并通过训练数据,优化己方落子位置方案,达到深度学习的效果。
58.在本发明中,如图1~2所示,所述的棋盘模块用于摆放棋子工件,所述的机械臂组件用于精准抓取和放置棋子工件,所述的机器视觉组件代替人工完成棋子工件颜色、位置的识别,该装置结构简单,模块高度集成化,便于调节安装及维护,更有占用空间小,适应多种教学科研场合的优点。
59.优选的,如图1~2所示,所述的载物平台箱体120包括放置完成按钮121、正光源按钮122、背光源按钮123、启动按钮124、复位按钮125、急停按钮126、把手127,所述的放置完成按钮121在载物平台箱体120前侧,位于正光源按钮122左侧,正光源按钮122在背光源按钮123左侧,背光源按钮123在启动按钮124左侧,启动按钮124在复位按钮125左侧,复位按钮125在急停按钮126左侧,所述的把手127安装在载物平台箱体120左右两侧,所述的把手127安装在载物平台箱体左右两侧,便于移动和搬运。
60.优选的,如图1~2所示,所述的棋盘组件210包含棋盘载物台211、棋盘载物台底座212、背光源213,所述的棋盘载物台211安装在棋盘载物台底座212上,所述的棋盘载物台底座212有四个,分别安装在背光源213两侧的四角位置,所述的背光源213安装在载物平台组件100上方前侧,面积略大于棋盘载物台211的棋盘格范围,背光源213自底向上打光时,光线可透过棋盘载物台211,便于相机识别棋盘范围及棋子工件的边缘轮廓和颜色,方便机械臂310进一步抓取放置棋子工件。
61.优选的,如图3所示,所述的视觉组件安装架420包括视觉组件固定块421、前后调节杆422、升降定位螺栓423、前后定位螺栓424、光源调节板425、光源左右调节螺栓426、相机固定板427、光源固定板428,所述的视觉组件固定块421通过中间的圆孔套装在立柱410顶端,所述的升降定位螺栓423安装在视觉组件固定块421后侧,所述的前后定位螺栓424安装在视觉组件固定块421左右两侧,所述的前后调节杆422有两根,两根调节杆相互平行,先
横向穿过视觉组件固定块421两端的两个圆孔,再横向穿过光源调节板425两侧的两个圆孔,安装在相机固定板427上,所述的光源左右调节螺栓426安装在光源调节板425后侧两端的滑道内,所述的光源固定板428安装在光源调节板425前侧两端,光源左右调节螺栓426安装在光源固定板428上,所述的升降定位螺栓423用于调节视觉组件安装架420在立柱410上的升降位置,前后定位螺栓424用于调节前后调节杆422相对于立柱410前后位置,光源左右调节螺栓426用于调节条形光源440的俯仰角度和左右位置,即条形光源440相对于工业相机430的远近,这种结构将工业相机430与条形光源440固定在同一支架上,保证相机和光源在调整时始终处于统一高度,通过调整左右、前后位置,条形光源440安装在准确位置且视场范围始终为最优状态,通过升降调节保证合适的物距,使工业相机430采集到的图像精度更高。
62.优选的,如图1~2所示,所述的棋盘载物台211为半透明的亚克力材质,这种亚克力的材质,重量轻,方便拆装和更换。
63.优选的,如图1~2所示,所述的棋子工件上下表面均为平面,方便吸嘴322的吸取和放置棋子。
64.优选的,如图4所示,所述的控制系统包括计算机、工业相机430、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的计算机连接工业相机430、光源控制器、机械臂控制器以及抓取组件控制电子阀,所述的光源控制器连接光源,所述的机械臂控制器连接机械臂410,抓取组件控制电子阀连接吸嘴322,所述的控制系统通过计算机控制工业相机430和光源控制器,先对棋盘模块进行拍照和补光,将识别到的坐标、颜色等信息发送给计算机,计算机收到后通过一系列计算处理,将信号发送到机械臂控制器,机械臂控制器接收到指令后,发送命令给机械臂310,控制机械臂310做相应动作,计算机控制抓取组件控制电子阀,阀门开启时气缸运动吸气,吸嘴322获取工件,阀门关闭时气缸停止吸气,吸嘴322松开工件,从而实现吸嘴322的抓取与放置,整个控制系统结构简单,体积小巧,方便用于教学演示和科研实验。
65.本发明还公开了一种下棋机器人的实现方法,其采用上述任一所述的下棋机器人执行如下步骤:
66.步骤1:人工在棋盘上放置一枚棋子,按下“放置完成”按钮;
67.步骤2:“放置完成”按钮按下,触发视觉系统对棋盘当前状态拍照;
68.步骤3:图像处理软件获取人工所下棋子的坐标位置信息;
69.步骤4:将获取到的棋子当前坐标信息,传输给下棋对弈系统软件;
70.步骤5:下棋对弈软件经分析计算得到最优下棋方案;
71.步骤6:将最优下棋方案的坐标发送给机械臂控制器;
72.步骤7:机械臂控制器控制机械臂抓取并放置棋子,完成下棋对弈。
73.在本发明当,步骤1、2:人工在棋盘上放置一枚棋子后按下“放置完成”按钮,按钮触发机器视觉组件400对棋盘补光并拍照,步骤3:机器视觉组件400将拍摄获取到的图像在视觉图像处理分析系统中进行落子位置及棋子颜色信息提取,步骤4:将提取到的落子位置及棋子颜色信息发送给计算机,计算机再将这些信息发送给下棋对弈系统,步骤5:将当前棋盘上对方落子位置信息与预设己方落子数据库进行对比,根据对比所得结果匹配最佳落子位置方案,并通过保存每次对弈记录训练数据,不断优化己方落子位置方案,达到深度学
习的效果,步骤6、7:机械臂410通过上述流程完成己方棋子的放置,学生可通过手动编程控制机械臂,教学功能多样,丰富了教师的讲学内容。
74.上面结合附图对本发明优选实施方式作了详细说明,但是本发明不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
75.不脱离本发明的构思和范围可以做出许多其他改变和改型。应当理解,本发明不限于特定的实施方式,本发明的范围由所附权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1