坐式跑步机和使用方法与流程
坐式跑步机和使用方法
1.本技术是国际申请号为pct/us2017/066693,国际申请日为2017年12月15日、发明名称为“坐式跑步机和使用方法”的pct申请于2019年07月03日进入中国国家阶段后申请号为201780082080.1的中国国家阶段专利申请的分案申请。
技术领域
2.本发明总体上涉及跑步机,并且更具体地说,涉及一种适于在就座时使用的跑步机。
背景技术:
3.传统的有氧运动设备,诸如跑步机、椭圆机、划桨机和固定骑行台,要求用户有足够的自给自足能力和平衡性,以支撑运动时其自身的大部分体重。用户还必须具有用来接收大型设备的专用区,在所述专用区中进行锻炼。对于相当大的一部分人来说,这是不切实际或不可能的。
4.由于主要的物理和监督限制,通常不允许以下人群使用上述设备。
5.残疾人:平衡能力差(帕金森氏症、神经系统疾病等)、由于糖尿病而患有神经病、是盲人或病态肥胖等的个体。
6.物理康复人群:从髋关节、背部或膝盖手术中恢复,并且在锻炼时不能将其全身重量放在腿上的个体。
7.老年人:健康状况很差、虚弱或另外需要持续监督的个体。
8.工作场所:大多数工作环境需要在办公桌前坐4至8小时或更长时间,并且在工作时不允许锻炼。
9.本发明提供在坐在舒适的安全环境(通常是椅子或沙发)中时进行有氧和下身运动。这使得所有上述个体群体能够以更牢靠、更安全且更易于驾驭的方式进行有氧运动。
10.现有技术教导了各种各样的跑步机,几乎所有跑步机都适用于站立位置(即,用于行走、跑步等)。在farnet的美国专利5,368,532中示出了这种跑步机的一个示例,该专利教导了一种带有围绕辊的环形皮带的机动跑步机。所述跑步机包括支撑前壳体的前柱,所述前壳体包括便于在皮带上跑步的扶手。所述前壳体包括用于控制马达的操作的控件,并且还提供帮助用户保持他或她的平衡的扶手。这些前壳体结构都不包括在本发明中。
11.现有技术中示出了适于就座位置使用的一些专用跑步机。示例包括以下内容:
12.hsu的美国专利9,084,911教导了一种相当标准的跑步机,其还包括安装在跑步机皮带上的椅子。虽然这示出了从就座位置使用跑步机的一般概念,但它在结构上与本发明不同。hsu跑步机的尺寸和形状类似于标准跑步机(即,皮带的长度为4至5英尺),并且包括标准前壳体构造。
13.netter的美国专利9,511,254教导了一种跑步机,其可以从站立或就座位置使用,并且可以与桌子结合使用。这种跑步机的皮带为38英寸长,因此它比其他站立式跑步机短,但它仍然比本发明长得多。此外,虽然这种跑步机可与直立部件(在这种情况下,呈桌子的
形式)分离,但它仍然包括前壳体,所述前壳体具有用于与桌子结构互锁的接合元件。重要的是,本发明完全免除了这种前壳体。
14.maaniitty的美国专利2015/0251047教导了一种与桌子和办公椅一起使用的跑步机。在herring的美国专利2015/0351553中也示出了类似的构造。
15.abboudi的美国专利5437588教导了一种在水池内使用来进行治疗运动的跑步机,其包括安装在一对侧部构件之间的环形轨道、在所述侧部构件中的一个上方间隔开并平行于其延伸的扶手、以及固定到所述一个侧部构件并为扶手提供支撑的垂直柱。就座构件安装在垂直柱上并且可相对于柱移动,以用于选择性地将就座构件设置在所述一个侧部构件上方的各个高度处,并且直接覆盖环形轨道或设置在其一侧。
16.现有技术教导了各种跑步机,所述跑步机中的一些可以在就座位置使用。然而,所有现有技术的跑步机都适用于典型的跑步机操作,其中用户在跑步机上行走或跑步。现有技术没有教导这样一种跑步机,其中前辊和后辊分开仅为10至30英寸的纵向距离,这对于这种典型的跑步机操作而言不够长,但是用于一种新的坐着踏步的过程,其中用户不站立在跑步机上,而是从就座位置在跑步机上移动他或她的脚。本发明满足了这些需求并提供了如下面的
技术实现要素:
中所述的其他优点。
发明内容
17.本发明教导了构造和使用方面的某些益处,这些益处产生了下述目的。
18.本发明提供了一种适于在就座位置使用的跑步机。所述跑步机包括:具有前部和后部的结构;前辊,其可旋转地安装在结构的前部上;以及后辊,其可旋转地安装在结构的后部上,使得后辊平行于前辊设置并与前辊间隔开介于10至30英寸之间的纵向距离。皮带围绕前辊和后辊安装。辊的间距导致平坦皮带长度在10至30英寸之间。
19.本发明的主要目的是提供一种具有现有技术未教导的优点的跑步机。
20.另一个目的是提供一种特别短的跑步机,其具有前辊和后辊,所述前辊和后辊分开一段纵向距离,使得平坦皮带长度仅为10至30英寸,该长度不适合典型的步行/跑步跑步机操作,但是使得实现本发明独特的新形式的就座踏步。
21.另一个目的是提供一种不具有前壳体使得在前辊前面没有连接侧框架的前部结构的跑步机。
22.另一个目的是提供一种可以由遥控器控制的跑步机。
23.另一个目的是提供一种跑步机,其在用户站立在跑步机上时自动关闭。
24.另一个目的是使踏面带材料具有增加的弹性、可压缩性和厚度,以改善可能未穿跑鞋的就座用户的舒适性和可用性。
25.从以下结合附图进行的更详细描述中可以明显看出本发明的其他特征和优点,所述附图以举例的方式示出了本发明的原理。
附图说明
26.附图示出了本发明。在这样的附图中:
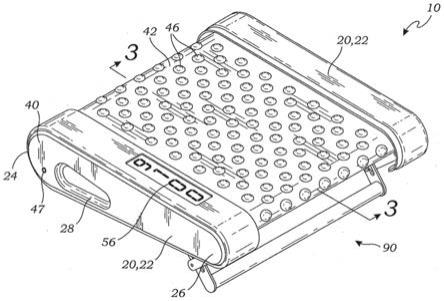
27.图1是根据本发明的一个实施方案的跑步机的透视图;
28.图2是用户从就座位置使用跑步机的透视图;
29.图3是沿图1中的线3-3截取的横截面图;
30.图4是跑步机的框图;
31.图5是处于降低位置的跑步机的侧视立面图;
32.图6是处于第一升高位置的跑步机的侧视立面图;
33.图7是处于第二升高位置的跑步机的侧视立面图;以及
34.图8是类似于图3的截面图,其示出了跑步机的另一个实施方案。
具体实施方式
35.上述附图示出了本发明,即一种适于从就座位置使用的跑步机。所述跑步机比现有技术的跑步机短得多,并且适于在坐着时在桌子处使用,在康复期间坐在家中使用,由老人坐着时以及以其他非传统方式使用。所述跑步机可以由行走困难的人使用,并且所述跑步机可以赤脚使用,或者穿着袜子使用,或者穿着不一定适合跑步的其他鞋类使用。
36.图1是根据本发明的一个实施方案的跑步机10的透视图。如图1所示,跑步机10包括用于支撑跑步机10的其他元件的结构20,如下所述。在该实施方案中,结构20包括一对侧部结构22,每个侧部结构22具有前部28和后部26。在一个实施方案中,结构20在前辊30前面显然不具有连接侧部结构22的任何前部结构。图3中示出了该结构20的进一步细节,如下面更详细地讨论的。虽然详细示出和讨论了结构20的一个实施方案,但是本领域技术人员可以想出用于支撑跑步机10的结构20的其他实施方案,并且这些替代构造应被认为是在本发明的范围内。
37.跑步机10还包括皮带42,用户将他或她的脚放在该皮带上。结构20支撑前辊和后辊(元件30和32,如图3所示),前辊和后辊支撑皮带42。结构20还可以包括各种替代元件,诸如用于显示关于跑步机10的使用的信息(例如,所走的步数、走过的距离、用户的心率、电池寿命等)的显示器56。跑步机10可以包括再充电端口47和可调支撑结构90。下面更详细地讨论所有这些特征以及更多特征。
38.如图1所示,结构20可以是在皮带42的任一侧上的框架的形式,并且结构20还包括凹部28,凹部28提供便于提起跑步机10的把手。
39.图2是用户从就座位置使用跑步机10的透视图。如图2所示,该跑步机10的特别短的长度使得能够独特地使用跑步机10。现有技术的跑步机意味着在上面步行和跑步,从而需要更大的尺寸和强度,而这种跑步机10不在站立位置使用,而是仅从就座位置使用。可以由遥控器70或其他类似机构(例如,语音控件以及其他形式的无线控件或遥控器70)提供对跑步机10的控制。如上所述,没有前壳体,使得在前辊30前面没有连接侧部结构22的前部结构。通常,用于跑步机10的控制机构位于某种形式的前部结构上,并且在这种情况下,这些现有技术方法是不可行的,因为在跑步机10的当前实施方案中没有前部结构。
40.可以提供诸如电源线48的充电机构以可操作地接合充电端口47。虽然示出了一个充电机构,但是可以使用任何形式的充电(例如,无线感应充电,或本领域中已知的任何其他方法)。由于电池、充电部件等不是新颖的,所以这里不再对其进行更详细描述。
41.图3是沿图1中的线3-3截取的其截面图。如图3所示,前辊30可旋转地安装在侧框架22的前部28上;并且后辊32可旋转地安装在侧框架22的后部26上。后辊32平行于前辊30设置并与前辊30间隔开纵向距离d。纵向距离d是从前辊30的中心轴线c1到后辊32的中心轴
线c2的距离。在该实施方案中,前辊和后辊32分开约10至30英寸的纵向距离d。在一个实施方案中,纵向距离d是14至28英寸。出于本技术的目的,术语“约”定义为+/-5%。辊30和32的间距导致平坦皮带长度(即,带42从中心轴线c1上方到中心轴线c2上方的长度)在10至30英寸之间。
42.在该实施方案中,前辊30的直径略大于后辊32的直径;然而,这不是必需的,并且在替代实施方案中,可以使用替代配置。
43.在图3的实施方案中,电动马达34(直接或间接地)安装在结构20上并且可操作地连接到前辊30以转动前辊30。电动马达34与电池36(或其他电源)可操作地连接以为电动马达34供电。在该实施方案中,马达34安装在床身(bed)38下方并在前辊30和后辊32之间。这种优选的放置使得跑步机10在前辊30前面没有结构,即现有技术的跑步机中提供的结构。尽管跑步机10的纵向长度极短,但是该前部结构的移除使得能够使用跑步机10。在替代实施方案中,马达34可以位于所述辊中的一个内(称为“moller”),诸如前辊30内。如果马达34直接插电式插入电源,诸如家用或其他结构的ac插座,则可以省略电池36。
44.在图3的实施方案中,结构20支撑位于前辊30和后辊32之间的床身38。在该实施方案中,横向支撑构件40(例如,肋等)从结构20(在这种情况下为侧框架22)延伸以支撑床身38。皮带42围绕前辊30、床身38和后辊32,使得在跑步机10的操作期间,床身38支撑皮带42。床身38被成形并调适为使得皮带42在使用期间可以在床身38上滑动,并且可以包括低摩擦涂层或顶层(未示出)以便于皮带42在床身38上移动。由于床身38的一般构造是已知的,所以这里不再对38进行更详细描述。在一些实施方案中,床身38可以用本领域已知的替代结构替换,或者可以省略。
45.在图3的实施方案中,皮带42包括坚固且无弹性的内层43(例如,纤维),和柔软且有弹性的外层44(例如,橡胶、软塑料等)。外层44可以包括弹性突起(也如图1所示),所述弹性突起提供舒适的表面,使得用户能够在赤脚时使用跑步机10。
46.在该实施方案中,力传感器62可操作地定位成感测从皮带42施加到床身38的力。在一个实施方案中,力传感器62用于检测是否过大的力施加到皮带42,诸如用户是否站立在皮带42上。由于在使用跑步机10的一些实施方案时不鼓励站立在跑步机10上,所以力传感器62可以操作以禁用马达34(即,使马达停止,将马达与辊断开,或以其他方式通过马达停止辊的移动等),以防止用户因跑步机10的使用不当而意外受伤。下面更详细地讨论力传感器62的使用。在另一个实施方案中,可以选择马达34以具有足以在高达一定重量的情况下(根据本领域技术人员的确定,例如,20磅或更高,或可能更高的阈值,诸如100磅,但不超过该阈值)移动皮带42的电流强度(即,马力)。以这种方式,如果用户站立在跑步机10上,则由于选择了马达34,跑步机10将停止,因为在用户的重量在跑步机10上时马达34的力量将不足以移动皮带42。
47.图4是跑步机10的框图。如图4所示,跑步机10可以包括用于控制电动马达34和跑步机10的操作的计算机控制器50。计算机控制器50可以包括计算机处理器52、计算机存储器54和本领域已知的用于提供这种控制的其他电子器件,并且可操作地连接到电动马达34和电池36或其他电源两者。由于所涉及的电子器件在本领域中通常是众所周知的,因此不再对其进行更详细描述。
48.计算机控制器50可以用于控制显示器56(例如,监视器、lcd屏幕、本领域已知的任
何形式的显示器),以用于显示用户感兴趣的信息(例如,所走的步数、走过的距离、用户的心率等)和或其他信息(诸如指令、电池寿命等)。虽然示出显示器56的一个实施方案,但是其可以具有本领域技术人员所需的任何尺寸、形状或配置。
49.计算机控制器50还可以与用于接收口头命令的传声器58、用于提供可听指令和其他反馈的扬声器60以及用于发送和/或接收信息和命令的收发器64可操作地连接。出于本技术的目的,术语“收发器”被定义为包括用于经由有线或无线通信在计算机控制器50和外部装置之间进行通信的任何形式的发送和/或接收器,诸如下面讨论的遥控器70。
50.在该实施方案中,计算机控制器50与力传感器62可操作地连接以在施加到床身38的力超过预定的最大重量的情况下,禁用电动马达34,并且指示用户正站立在跑步机10上而不是从就座位置操作跑步机10。例如,在一个实施方案中,如果力超过100磅,则可以禁用电动马达34。本领域技术人员可以使用替代的重量,只要它们指示跑步机10的不正确使用,以及与跑步机10的正确使用不一致。
51.如图4所示,跑步机10还可以包括用于远程控制跑步机10的操作的遥控器70。在该实施方案中,遥控器70包括微控制器72(其包括计算机处理器74和计算机存储器76),微控制器72与电池36可操作地连接,并且可操作地控制显示器78、传声器80、扬声器82和控制机构84,以用于可操作地控制跑步机10的电动马达的操作。出于本技术的目的,术语“微控制器”被定义为包括任何形式的微控制器、电路、计算机或本领域已知的用于执行本文所述的功能的其他电子器件。术语“控制机构”被定义为包括可以用于控制跑步机10的操作的任何形式的控件(例如,按钮、操作杆、旋钮、触摸屏、语音致动、本领域已知的其他机构等)。
52.遥控器70还可以包括用于与计算机控制器50通信的收发器86,以及用于跟踪遥控器70的移动的加速度计88,使得遥控器70可以用于经由遥控器70的移动来控制跑步机10。
53.在图1的实施方案中,遥控器70是特别针对跑步机10设计的机械装置。在替代实施方案中,遥控器70可以是另一种形式,诸如智能手机或本领域中已知的其他合适的电子装置。
54.图5是处于降低位置的跑步机10的侧视立面图。图6是处于第一升高位置的跑步机10的侧视立面图。图7是处于第二升高位置的跑步机10的侧视立面图。如图5至图7所示,跑步机10还包括可调支撑结构90,可调支撑结构90可以用于升高和降低跑步机10,并且调整跑步机10的角度。图5示出了处于降低位置的跑步机10,其中可调支撑结构90折叠,并且跑步机10平放在地面上。
55.图6示出了当经由可调支撑结构90将跑步机升高到第一角度a1时的跑步机。图7示出了当经由可调支撑结构90将跑步机升高到第二角度a2时的跑步机。如图6和图7所示,可调支撑结构90包括一对支撑件92,每个支撑件可以包括第一支腿94和第二支腿96,每个支腿各自可枢转地附接到结构20(或其他中间结构)。第一支腿94包括柱98,柱98接合调整槽100,调整槽100包括多个接收器102。通过改变接收器102中哪个接收器被柱98接合到其中,用户能够调整跑步机10的角度。
56.虽然示出了可调支撑结构90的一个实施方案,但是本领域技术人员可以想出用于调整跑步机10的角度的替代结构。在一个替代实施方案中,可调支撑结构90可以是可以经由计算机控件(诸如图1和图4中所示的遥控器70)调整的机动结构。本领域技术人员可以设计多种机构和结构,它们用于调整床身38(如图3所示)的角度,以调整在跑步机10上进行的
锻炼,并且这些替代方案应被认为是在本发明的范围内。图8中还示出了可调支腿结构90的替代位置,如下所述。
57.图8是类似于图3的截面图,其示出了跑步机的另一个实施方案。如图8所示,可调支撑结构90可替代地位于跑步机10的前端、邻近前辊30。此外,在该实施方案中,力传感器62可以位于床身38和肋40之间。虽然该图示出了本发明范围内的另一种配置,但是本发明不应限于具体示出的实施方案。可调支撑结构90可以包括本领域中已知的任何形式的调整机构,并且力传感器62可以包括本领域中已知的用于感测力、扭矩或其他等同测量的任何形式的传感器,并且可以位于本领域技术人员认为合适的任何位置。力传感器可以例如确定置于辊中的一个或两个上的阻力增加等。
58.如在本技术中所使用的,除非另外特别说明,否则词语“一”、“一个”和“一种”被定义为包括一个或多个所引用的项目。除非另有说明,否则术语“大约”和“约”被定义为表示+/-10%。此外,除非另外特别说明,否则术语“具有”、“包括”、“含有”和类似术语被定义为表示“包含”。此外,在上文提供的说明书中使用的术语在此被定义为包括类似和/或等同的术语,和/或鉴于本专利申请的教导将被认为对于本领域技术人员来说显而易见的替代实施方案。虽然已经参考至少一个特定实施方案描述了本发明,但是应该清楚地理解,本发明不限于这些实施方案,而是本发明的范围由所附权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1