一种胸外科用术后锻炼装置的制作方法
1.本发明属于医疗器械技术领域,特别是涉及一种胸外科用术后锻炼装置。
背景技术:
2.胸外科手术是治疗食道癌、肺癌、纵膈肿瘤、肋骨骨折等多种胸外科疾病的常用手段之一。但因其手术时间长,手术创面大,患者术后往往易发生急性呼吸衰竭、肺不张、肺炎、呼吸系统感染以及胸腔积液等并发症,是胸外科术后的主要死亡诱因之一,对手术疗效、患者肺功能的恢复及预后均构成了直接影响。
3.胸外科患者术后病人活动可增加肺活量,利于排痰,减少肺部并发症,改善全身血液循环、防止下肢静脉血栓的形成,促进伤口愈合,并且有利于胃肠道功能的恢复,增进食欲,减少腹胀。
4.运动锻炼需注意:1)开始运动时,病人可先躺着进行,然后可改为坐姿、站姿;2)先进行被动运动,逐步过渡到主动运动;3)运动量应由少至多,当病人耐受力增加时再增加其运动量等。
5.目前对于胸外科手术后的患者的早期康复锻炼,基本都是由家属或护士辅助去完成,护士与家属由于照顾病人劳累,在进行康复锻炼上会出现不及时、锻炼时间少等诸多问题,会影响患者的康复进度,甚至引起各种并发症的发生。
技术实现要素:
6.针对上述技术问题,本发明提供了一种胸外科用术后锻炼装置,解决了护士与家属由于照顾病人劳累,在进行康复锻炼上会出现不及时、锻炼时间少等诸多问题,会影响患者的康复进度,甚至引起各种并发症的发生的问题。
7.为了实现上述目的,本发明提供如下技术方案;包括升降台,所述升降台上设有可左右调节的调节座,所述调节座上设有角度可调的定位架,所述定位架上转动连接有相互啮合的第一蜗轮与第一蜗杆、第二蜗轮与第二蜗杆,所述第一蜗杆与第二蜗杆同轴固定连接,所述第一蜗轮同轴固接有第一连杆,所述第二蜗轮同轴固接有第二连杆,所述第一连杆与第二连杆相同且平行设置,所述第一连杆远离第一蜗轮的一端铰接有支撑架,所述第二连杆远离第二蜗轮的一端与支撑架铰接,所述支撑架上铰接有放置架与电动推杆,所述电动推杆远离支撑架的一端与放置架铰接,所述放置架上设有按摩机构;所述按摩机构包括设置于放置架内部的按摩板,所述按摩板上设有多个按摩组件,所述按摩板的下端铰接有第一轴套,所述第一轴套内转动连接有第一偏心轮,所述第一偏心轮上固定连接有主动轴,所述主动轴与放置架转动连接,所述放置架上固定连接有定位带,所述定位带的下方设有按压凸点;所述升降台上设有可升降调节的升落架,所述升落架上设有两组可调节角度、结构相同且左右对称的调节架,所述调节架包括与升落架铰接的第三连杆和第四连杆,所述第三连杆远离升落架的一端铰接有调整架,所述第四连杆远离升落架的一端与调整架铰
接,两个第三连杆上共同滑动连接有滑动座,所述滑动座上转动连接有球体,所述球体上设有多个凸起。
8.优选的,所述放置架与支撑架铰接处设有铰接轴,所述铰接轴上同轴固接有第一带轮与第二带轮,所述主动轴上固定连接有第三带轮,所述第一带轮与第三带轮之间通过第一传送带连接,所述支撑架上转动连接有第四带轮,所述第四带轮与第二带轮之间通过第二传送带连接,所述第四带轮上设有按摩盘。
9.优选的,所述第四带轮上固定连接有第二偏心轮,所述按摩盘的下端固定连接有第二轴套,所述第二偏心轮与第二轴套转动连接。
10.优选的,所述球体上固定连接有穿过其中心的转动轴,所述转动轴的左右两端固定连接有手摇把,两个手摇把呈180
°
设置。
11.优选的,所述升落架上铰接有第一转动块,所述第一转动块上螺纹连接有第一丝杠,两个第四连杆上固定连接有固定杆,所述固定杆上铰接有第二转动块,所述第一丝杠与第二转动块转动连接。
12.优选的,所述调整架包括第一滑杆和第二滑杆,所述第一滑杆与第二滑杆上都滑动连接有两个左右对称的滑套,每个滑套上都转动连接有第一定滑轮,左右同侧的两个滑套固定连接有握杆,每个滑套的左右两侧都设有套在第一滑杆或第二滑杆上的弹簧,所述第四连杆上沿其轴向方向固定连接有多个抓杆,每个抓杆上都转动连接有第二定位轮,所述滑动座上固定连接有拉绳,所述拉绳依次绕过左右同侧的每个第二定滑轮及第一定滑轮并在其另一端固定连接有拉环。
13.优选的,所述升降台上转动连接有第二丝杠,所述第二丝杠与调节座螺纹连接。
14.优选的,所述第一蜗杆上固定连接有第一锥齿轮,所述定位架上转动连接有与第一锥齿轮啮合的第二锥齿轮,所述定位架上固定安装有电机,所述电机的输出端与第二锥齿轮固定连接,所述定位架上同轴固接有第三蜗轮,所述第三蜗轮啮合有与调节座转动连接的第三蜗杆。
15.优选的,所述升降台包括底座,所述底座的上方设有升降板,所述升降板与移动底座之间设有升降机构,所述升降机构包括与底座铰接的第五连杆和与升降板铰接的第六连杆,所述第五连杆远离底座的一端与升降板滑动连接,所述第六连杆远离升降板的一端与底座滑动连接,所述第五连杆与第六连杆铰接,所述底座上前后滑动连接有滑块,所述滑块上螺纹连接有调节丝杠,所述调节丝杠与底座转动连接,所述滑块与第五连杆铰接。
16.与现有技术相比,本发明的有益效果是:1)定位架的角度可调节,可将放置架调节到水平状态,并通过电动推杆可进行下肢的外展或内收训练;2)放置架可被调节到竖直状态,并通过电动推杆可进行下肢的上抬或下落训练;3)定位架可做往复回转运动,可实现对患者的下肢进行回转运动,通过调节放置架与定位架之间的距离可对患者的下肢摆动幅度进行调整;4)在患者的下肢进行摆动、抬落、伸展等运动时,按摩机构可对患者的下肢进行按摩,增进血液流通,进一步保持肌肉活力;5)通过升降台、第一连杆、第二连杆可以将放置架调节到病床的内部上方,通过第三连杆、第四连杆可以将球体调节到患者的上肢附近,使患者在躺卧的姿势下可以进行肢体功能锻炼,且在不使用时,升降台、升落架回落,放置架调节到水平状态,可以减小整体装置的空间;6)通过推动球体或拉动拉环可进行上肢功能的主动锻炼,且通过第三连杆的倾斜角度可对患者推动球体的推动力或拉力进行调节,另
外,通过双手可转动手摇把,对患者的上肢进行骑自行车式的锻炼;7)通过第二偏心轮与按摩盘的配合可实现患者下肢主被动画圈运动;本装置功能多样,可对患者的上下肢进行主动、被动锻炼,且可根据不同的患者进行训练强度的调节,通过本装置可实现患者早期全面的肢体锻炼,有利于患者恢复,减少各种并发症的发生,代替了家属或护士的劳动力,避免了锻炼不及时、时间少等情况的发生。
附图说明
17.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明升降台、升落架收缩及放置架调节为左右方向放置的整体结构示意图。
18.图2是本发明升降台升高后将放置架调节为竖直方向设置的的整体结构示意图。
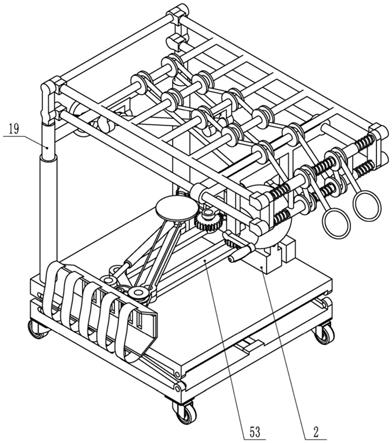
19.图3是本发明升降台升高后左右放置的放置架可对患者的双腿进行左右方向锻炼的整体结构示意图。
20.图4是本发明放置架被调节为竖直状态后进行下肢锻炼的结构示意图。
21.图5是图4中的a部放大示意图。
22.图6是本发明放置架被调节为水平状态后进行下肢锻炼的结构示意图。
23.图7是本发明定位带的结构示意图。
24.图8是本发明按摩板进行前后左右运动对下肢按摩及按摩盘对下肢进行前后左右活动的结构示意图。
25.图9是本发明按摩板进行前后左右运动对下肢按摩及按摩盘对下肢进行前后左右活动的结构分解示意图。
26.图10是本发明第三连杆、第四连杆进行角度调节的同时可对调整架的位置进行调节的结构示意图。
27.图11是本发明摇动手摇把带动球体转动的结构示意图。
28.图12是本发明第三连杆、第四连杆被调节定位的结构示意图。
29.图13是图10中的b部放大示意图。
30.图中:1-升降台、101-底座、102-升降板、103-第五连杆、104-第六连杆、105-调节丝杠、2-调节座、3-定位架、4-第一蜗轮、5-第一蜗杆、6-第二蜗轮、7-第二蜗杆、8-第一连杆、9-第二连杆、10-支撑架、11-放置架、12-电动推杆、13-按摩板、14-按摩组件、15-第一轴套、16-第一偏心轮、17-定位带、18-按压凸点、19-升落架、20-第三连杆、21-第四连杆、22-调整架、23-滑动座、24-球体、25-凸起、26-铰接轴、27-第一带轮、28-第二带轮、29-第三带轮、30-主动轴、31-第一传送带、32-第四带轮、33-第二传送带、34-按摩盘、35-第二偏心轮、36-第二轴套、37-转动轴、38-手摇把、39-第一转动块、40-第一丝杠、41-固定杆、42-第二转动块、43-第一滑杆、44-第二滑杆、45-滑套、46-第一定滑轮、47-握杆、48-弹簧、49-抓杆、50-第二定滑轮、51-拉绳、52-拉环、53-第二丝杠、54-第一锥齿轮、55-第二锥齿轮、56-电机、57-第三蜗轮、58-第三蜗杆。
具体实施方式
31.现在结合附图对本发明作进一步详细的说明。附图为简化的示意图,仅以示意方式说明本发明基本结构,因此其仅显示与本发明有关的构成。
32.参照图1-13所示,本发明包括升降台1,所述升降台1上设有可左右调节的调节座2,所述调节座2上设有角度可调的定位架3,所述定位架3上转动连接有相互啮合的第一蜗轮4与第一蜗杆5、第二蜗轮6与第二蜗杆7,所述第一蜗杆5与第二蜗杆7同轴固定连接,所述第一蜗轮4同轴固接有第一连杆8,所述第二蜗轮6同轴固接有第二连杆9,所述第一连杆8与第二连杆9相同且平行设置,所述第一连杆8远离第一蜗轮4的一端铰接有支撑架10,所述第二连杆9远离第二蜗轮6的一端与支撑架10铰接,所述支撑架10上铰接有放置架11与电动推杆12,所述电动推杆12远离支撑架10的一端与放置架11铰接,所述放置架11上设有按摩机构;所述按摩机构包括设置于放置架11内部的按摩板13,所述按摩板13上设有多个按摩组件14,所述按摩板13的下端铰接有第一轴套15,所述第一轴套15内转动连接有第一偏心轮16,所述第一偏心轮16上固定连接有主动轴30,所述主动轴30与放置架11转动连接,所述放置架11上固定连接有定位带17,所述定位带17的下方设有按压凸点18;所述升降台1上设有可升降调节的升落架19,所述升落架19上设有两组可调节角度、结构相同且左右对称的调节架,所述调节架包括与升落架19铰接的第三连杆20和第四连杆21,所述第三连杆20远离升落架19的一端铰接有调整架22,所述第四连杆21远离升落架19的一端与调整架22铰接,两个第三连杆20上共同滑动连接有滑动座23,所述滑动座23上转动连接有球体24,所述球体24上设有多个凸起25。
33.升降台1可选用移动式的,在患者早期卧床期间,可以通过移动式的升降台1将整体装置移动到患者的病床处使用进行早期功能锻炼,整体装置移动到病床边后固定,接着通过升降台1将调节座2调节到超过床面的高度,如图3所示,初始时,放置架11处于水平放置的状态,当通过驱动机构驱动第一蜗杆5和第二蜗杆7同时转动时,第一蜗杆5带动第一蜗轮4转动,第二蜗杆7带动第二蜗轮6转动,同时第一蜗轮4带动第一连杆8转动,第二蜗轮6带动第二连杆9转动,第一连杆8、第二连杆9、定位架3和支撑架10构成了平行四边形结构,当第一连杆8、第二连杆9同步同向转动时,放置架11可以前后调节位置将放置架11伸入到病床上的适应位置,然后将患者的下肢固定到放置架11上,接着启动电动推杆12,电动推杆12属于现有技术,在此不再累赘,当电动推杆12伸长时,会带动放置架11转动,此时患者的下肢会向外部伸展,当电动推杆12缩短时,患者下肢向内侧回收,当患者的一侧下肢锻炼一定次数时,可以转动定位架3,将放置架11翻转到另一侧并对另一侧的下肢进行锻炼,电动推杆12伸长或缩短的幅度可通过电动推杆12内的电机进行控制;通过调节定位架3的角度可以将放置架11调节为竖直状态,当放置架11被调节为竖直状态后,再通过调节第一连杆8、第二连杆9的角度可将放置架11伸入病床的内部,便于患者在躺卧姿势下进行锻炼,此时患者的下肢放到放置架11上,启动电动推杆12使其伸长时,患者的下肢会进行向上抬升,电动推杆12缩短时,患者的下肢向下回落;当电动推杆12不启动时,患者的下肢放到放置架11上,通过回转结构带动定位架3做往复回转运动时,患者的下肢也可跟随着进行往复的回转摆动,通过调节第一连杆8与第二连杆9的角度,可对放置架11与定位架3之间的距离进行调节,当放置架11与定位架3的距
离变大时,患者下肢左右摆动的幅度就会增大,当放置架11与定位架3之间的距离减小时,患者下肢左右摆动的幅度就会变小。
34.如图8、图9所示,按摩板13与放置架11前后滑动连接,主动轴30上连接有驱动电机,当启动电机带动主动轴30转动时,主动轴30带动第一偏心轮16同步转动,第一偏心轮16、第一轴套15与按摩板13构成了曲柄滑块机构,当第一偏心轮16转动时,按摩板13会在放置架11上前后运动对患者的下肢进行按摩,促进血液流通,维持肌肉活力,按摩组件14包括与按摩板13转动连接的转动轴,转动轴上固定连接有多个偏心设置的按摩轮,当按摩板13前后运动进行按摩的同时偏心的按摩轮会对下肢进行挤压按摩;在对患者的上肢功能进行锻炼时,可以将放置架11调节为水平状态,升降台1回落,然后升高升落架19的高度,使第三连杆20、第四连杆21高出病床的高度,接着调节第三连杆20、第四连杆21的角度使第三连杆20、第四连杆21远离升落架19的一端靠近患者的上肢位置且使第三连杆20、第四连杆21保持向下倾斜一定角度,患者躺在病床上,上肢弯曲状态下可以碰触到球体24,然后患者上肢伸直可以对球体24进行推动使球体24通过滑动座23沿着两个第三连杆20的轴向向靠近升落架19的位置运动并升高,当患者收去对球体24的推动力后,在球体24及滑动座23自身重力的作用下,滑动座23带动球体24向下复位到初始位置,如此往复可对患者的上肢进行主动锻炼;另外,滑动座23的位置可以通过锁紧螺钉将其固定到第三连杆20上,然后用手拨动球体24,可使球体24在滑动座23上转动,从而达到对患者手部及手腕力量进行锻炼的作用,在患者拨动或推动球体24时,球体24上的凸起25可对患者的手部进行按摩促进上肢血液的流通;另外,患者的手部握住调整架22时,通过调节第三连杆20、第四连杆21的角度可对患者的上肢进行被动的拉伸。
35.如图8、图9所示,所述放置架11与支撑架10铰接处设有铰接轴26,所述铰接轴26上同轴固接有第一带轮27与第二带轮28,所述主动轴30上固定连接有第三带轮29,所述第一带轮27与第三带轮29之间通过第一传送带31连接,所述支撑架10上转动连接有第四带轮32,所述第四带轮32与第二带轮28之间通过第二传送带33连接,所述第四带轮32上设有按摩盘34。
36.当驱动电机带动主动轴30转动的同时,可带动第一偏心轮16与第三带轮29同时转动,第三带轮29通过第一传送带21带动同轴固接的第一带轮27和第二带轮28转动,第二带轮28通过第二传送带33带动第四带轮32转动,按摩盘34设置到第四带轮32的偏心位置上,双脚放置到按摩盘34上,当第四带轮32转动时,按摩盘34会带动患者的双脚进行圆周运动对患者的下周进行摆动锻炼。
37.具体的,所述第四带轮32上固定连接有第二偏心轮35,所述按摩盘34的下端固定连接有第二轴套36,所述第二偏心轮35与第二轴套转动连接。
38.第四带轮32转动带轮带动第二偏心轮35转动时,此时患者的双脚放到按摩盘34上可进行圆周运动,当第四带轮32不转动时,患者的双脚放到按摩盘34上可进行主动的往复回转运动。
39.具体的,如图11所示,所述球体24上固定连接有穿过其中心的转动轴37,所述转动轴27的左右两端固定连接有手摇把38,两个手摇把38呈180
°
设置。
40.当球体24被调节至靠近患者上肢的时候,患者的双手可以握住两个手摇把38进行摇动并带动球体24转动,通过摇动两个手摇把38的方式可对患者的上肢进行主动的肩关节锻炼。
41.具体的,如图12所示,为了实现对第三连杆20及第四连杆21的角度进行调节,所述升落架19上铰接有第一转动块39,所述第一转动块39上螺纹连接有第一丝杠40,两个第四连杆21上固定连接有固定杆41,所述固定杆41上铰接有第二转动块42,所述第一丝杠40与第二转动块42转动连接。
42.在需要对第三连杆20和第四连杆21的角度进行调节时,需要转动第一丝杠40,第一丝杠40与第一转动块39螺纹连杆,当转动第一丝杠40时,第一丝杠40伸长或缩短,由此可实现第三连杆20及第四连杆21角度的调节。
43.如图13所示,所述调整架22包括第一滑杆43和第二滑杆44,所述第一滑杆43与第二滑杆44上都滑动连接有两个左右对称的滑套45,每个滑套45上都转动连接有第一定滑轮46,左右同侧的两个滑套45固定连接有握杆47,每个滑套45的左右两侧都设有套在第一滑杆43或第二滑杆44上的弹簧48,所述第四连杆21上沿其轴向方向固定连接有多个抓杆49,每个抓杆49上都转动连接有第二定位轮50,所述滑动座23上固定连接有拉绳51,所述拉绳51依次绕过左右同侧的每个第二定滑轮50及第一定滑轮46并在其另一端固定连接有拉环52。
44.在进行上肢锻炼时,还可以通过双手握住拉环52进行前后拉动,在拉动拉环时,会通过拉绳51拉动滑动座23在第三连杆20上滑动,第三连杆20向下倾斜角度越大,滑动座23与球体24的重力沿第三连杆轴向的分力就越大,需要的拉动力就越大;反之,第三连杆20向下倾斜角度越小,所需要的的拉动力就越小,根据患者的恢复情况可以循序渐进的增强锻炼的强度;另外,患者的双手可以分别握住握杆47,然后可以向外侧拉动握杆,或向内侧挤压握杆47,在弹簧48的作用下可进行上肢力量的锻炼。
45.具体的,为了实现调节座2的左右位置调节,所述升降台1上转动连接有第二丝杠53,所述第二丝杠53与调节座2螺纹连接。
46.第二丝杠53与调节座2构成了丝杠螺母结构,当转动第二丝杠53时,调节座2会在升降台1上左右调节,且根据丝杠螺母的自锁性,调节后的调节座2的位置处于稳定状态。
47.如图5所示,为了实现对第一连杆8和第二连杆9角度的调节,所述第一蜗杆5上固定连接有第一锥齿轮54,所述定位架3上转动连接有与第一锥齿轮54啮合的第二锥齿轮55,所述定位架3上固定安装有电机56,所述电机56的输出端与第二锥齿轮55固定连接,所述定位架3上同轴固接有第三蜗轮57,所述第三蜗轮57啮合有与调节座2转动连接的第三蜗杆58。
48.在调节角度时,启动电机56,电机56带动第二锥齿轮55转动,第二锥齿轮55带动与之啮合的第一锥齿轮54转动,第一锥齿轮54带动同轴固接的第一蜗杆5与第二蜗杆7转动;在对定位架3的角度进行调节时,转动第三蜗杆58,第三蜗杆58带动与之啮合的第三蜗轮57转动,第三蜗轮57转动带动定位架3转动,利用蜗轮蜗杆的自锁性,调节后的定位架3处于一定角度且处于稳定状态。
49.其中,为了实现升降台1的升降,所述升降台1包括底座101,所述底座101的上方设
有升降板102,所述升降板102与移动底座101之间设有升降机构,所述升降机构包括与底座101铰接的第五连杆103和与升降板102铰接的第六连杆104,所述第五连杆103远离底座101的一端与升降板102滑动连接,所述第六连杆104远离升降板102的一端与底座101滑动连接,所述第五连杆103与第六连杆104铰接,所述底座101上前后滑动连接有滑块,所述滑块上螺纹连接有调节丝杠105,所述调节丝杠105与底座101转动连接,所述滑块与第五连杆103铰接。
50.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1