基于安全才可正常运行的电动倒走机的制作方法
基于安全才可正常运行的电动倒走机
本技术是申请日为2019年03月20日,申请号为cn201910259089.6的发明名称为“基于安全才可正常运行的电动倒走机及其安全控制方法”的分案申请。
技术领域
1.基于安全才可正常运行的电动倒走机,属于健身器械及健身方法领域,具体涉及到一种基于安全才可正常运行的电动倒走机。
背景技术:
2.倒走运动的好处。倒走就是倒着步行的意思。科学测定,倒走运动是比正走运动更好的运动方式——用同样的速度和同样的时间,倒走运动消耗的能量比正向走路或跑步要多得多,而且倒走可以锻炼腰脊肌、股四头肌、膝关节和踝关节周围的肌肉、韧带等,从而调节脊柱、肢体的运动功能,促进血液循环,长期坚持倒走对腰腿酸痛、抽筋、肌肉萎缩、关节炎等有良好的辅助治疗作用,另外,倒走还可以矫正驼背、可以减肥等等。
3.倒走运动的问题。既然倒走运动有那么多的好处,那么为什么没用很多人使用倒走的方法进行锻炼呢?原因有二:第一是倒走的方向问题引起的安全问题,因为人的后面没长眼睛,所以很难看清后面的路,从而很难走在一条直线上,进而引起安全问题——在电动倒走机来说就是很容易踩到跑带外面,而经常性踩到跑带外面不仅会使锻炼不顺畅进而影响锻炼功效,还会经常性吓人一跳从而影响心脏健康;第二是倒走的重心问题引起的安全问题,倒走时人体重心偏后,所以其平衡性很难把握,很容易摔跤,进而引起摔倒受伤和摔倒死亡等严重安全问题。
4.可以说,假如我们解决了倒走运动中“方向问题和重心问题及其引起的安全问题”这二大问题,那么必定会有越来越多的人加入到倒走的队伍中且享受到倒走运动的好处的。
5.当我们正常步行或跑步的时候,我们的双臂会自然而然的前后摆动,我们这样做是为了保持平衡、防治摔倒,不过,如果单单从运动消耗能量的角度来说,我们正常步行或跑步时双臂自然而然的前后摆动是节省了能量还是消耗了能量?从锻炼的角度来说,双臂自然而然的前后摆动是对我们人体最好的吗?来自美国布朗大学的生物力学专家christopher arellano带领的团队对此进行了详细的研究:他们让13位经常慢跑的人在电动跑步机上跑步,一开始受试者以正常速度双臂自然而然的前后摆动方式跑步,同时研究人员测量了他们需要呼吸的氧气和呼出的二氧化碳频率,随后受试者要以三种不同的方式跑步:一种是双手放在背后,一种是双手放在胸前,最后一种是双手放在头上。从他们在《实验生物学》杂志上发表的文章上写到,实验显示,摆动双臂要比把双手放在背后节约3%能量,比双手放在胸前节约9%,比双手放在头上节约13%。科学家解释说,虽然摆动双臂会消耗能量,但是双臂不动消耗的能量更多,因为摆动双臂可以减少上身的晃动。上身占总体重的40%-50%,而双臂只占10%。也就是说,从运动效果上来说,双臂自然而然的前后摆动的正常步行或跑步相比较双手不动的正常步行或跑步其锻炼效果最差,而在双手不动的正常
步行或跑步方式中双手放在头上效果最好,双手放在胸前次之,双手放在背后也有一定的效果——也就是说,双手放在头上、胸前和背后等双手不动的正常步行或跑步方式是比双手自然摇摆的正常步行或跑步方式更好的运动方式。
6.现有技术已经有专利号201510387336.2的“倒走健身方法及其倒走机”的发明了,该发明利用双手抓住竖扶手和高扶手并绑定安全带的方法解决了倒走运动中的“方向问题和重心问题引起的安全问题”,同时该发明还带来了[0005]中所述的双手不动进行走路或跑步锻炼能带来的更好的锻炼功效,一举多得。
[0007]
可是,以上发明还是存在着问题的。第一个问题:我们知道,人们锻炼时总会开小差的,如:擦汗、接听电话、聊天、喝水、看电视、看风景、听新闻等等,此时,锻炼者就有可能放开抓着竖扶手和高扶手的双手,还是会产生倒走运动中的“方向问题和重心问题——注:由于有安全带所以不会引起的严重安全问题,但会引起经常性踩到跑带外面带来的问题:不仅会使锻炼不顺畅进而影响锻炼功效,还会经常性吓人一跳从而影响心脏健康,并且不能得到[0005]中所述的双手不动进行走路或跑步锻炼能带来的更好的锻炼功效,是一种浪费”;第二个问题:很多锻炼者会嫌绑安全带这一动作太麻烦或不舒服从而不绑安全带进行锻炼,这样在锻炼者放开抓着竖扶手和高扶手的双手时就会产生“重心问题引起的安全问题”。
[0008]
有鉴于此,我们有必要把“抓住竖扶手或高扶手在倒走机上进行倒走锻炼”这一行为和“倒走锻炼时应该绑定安全带”这一行为作进一步的规范。
技术实现要素:
[0009]
本发明要解决的技术问题是:克服现有各种电动倒走机在安全控制方面存在的不足,提供了一种基于安全才可正常运行的电动倒走机及其安全控制方法。
[0010]
本发明的基于安全才可正常运行的电动倒走机及其安全控制方法,是通过如下的技术方案来实现上述目的的,包括:电动跑步机(1)、左立柱(2)、右立柱(3)、左竖扶手杆(4)、右竖扶手杆(5)、高扶手杆(6)、左扶手传感器(7)、右扶手传感器(8)、感应控制系统(9),其特征是:所述电动跑步机(1)是一台电动倒走机,即电动跑步机(1)上的跑带的行进方向是向着电动跑步机(1)控制面板方向行进的,这样当锻炼者面向电动跑步机(1)控制面板进行锻炼时脚步必须向后迈出从而达到面向电动跑步机(1)控制面板进行倒走锻炼的效果(如果双脚不动整个人就会顺着跑带的方向前移进而与电动跑步机(1)控制面板相碰撞的),常见电动跑步机的跑带的行进方向是由电动跑步机电机控制的,通过互换电动跑步机电机电源输入端火线和零线就可以改变电动跑步机电机转轴的旋转方向进而把跑带向后走从而带来正走正跑功能的电动跑步机改变为跑带向前走从而带来倒走倒跑功能的电动倒走机,所述电动跑步机(1)左侧的左底架上固定安装有与电动跑步机(1)左横扶手连接固定的竖立的左立柱(2),左立柱(2)高度等于或高于电动跑步机(1)左横扶手的高度,所述电动跑步机(1)右侧的右底架上固定安装有与电动跑步机(1)右横扶手连接固定的竖立的右立柱(3),右立柱(3)高度等于或高于电动跑步机(1)右横扶手的高度,左立柱(2)和右立柱(3)都是空心的,左竖扶手杆(4)与左立柱(2)配套、并套装在左立柱(2)里面并可调节高度并用卡扣、旋扣或用螺丝固定,右竖扶手杆(5)与右立柱(3)配套、并套装在右立柱(3)里
面并可调节高度并用卡扣、旋扣或用螺丝固定,左竖扶手杆(4)和右竖扶手杆(5)顶端之间或其上面固定或非固定连接有一根的高扶手杆(6),通过调节左竖扶手杆(4)和右竖扶手杆(5)的高度并固定可调节高扶手杆(6)的高度,高扶手杆(6)左侧一半杆体和左竖扶手杆(4)用于锻炼者面向电动跑步机(1)控制面板进行锻炼时左手抓扶用,高扶手杆(6)右侧一半杆体和右竖扶手杆(5)用于锻炼者面向电动跑步机(1)控制面板进行锻炼时右手抓扶用,当锻炼者面向电动跑步机(1)控制面板单手或双手各自平举、高举或向前向上举起左手抓住高扶手杆(6)左侧一半杆体或左竖扶手杆(4)、和或右手抓住高扶手杆(6)右侧一半杆体或右竖扶手杆(5)进行倒走锻炼时,不仅更安全而且锻炼效果更好,所述高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上配置有左扶手传感器(7),所述高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上配置有右扶手传感器(8),左扶手传感器(7)用于检测感应锻炼者的左手是否已经抓住抓紧了高扶手杆(6)左侧一半杆体或左竖扶手杆(4),并把检测感应结果通过独立的数据线传送到感应控制系统(9)上,右扶手传感器(8)用于检测感应锻炼者的右手是否已经抓住抓紧了高扶手杆(6)右侧一半杆体或右竖扶手杆(5),并把检测感应结果通过独立的数据线传送到感应控制系统(9)上,所述感应控制系统(9)用于接收和或分析左扶手传感器(7)和或右扶手传感器(8)传送来的锻炼者左手和或右手的抓杆情况,其左手和或右手的抓杆情况包括:左手有否抓住高扶手杆(6)左侧一半杆体或左竖扶手杆(4)及其抓杆力度大小、右手有否抓住高扶手杆(6)右侧一半杆体或右竖扶手杆(5)及其抓杆力度大小,所述感应控制系统(9)内置在电动跑步机(1)控制系统里或单片机里或集成电路里或机载电脑里、并根据接收和或分析出的锻炼者左手和或右手的抓杆情况控制电动跑步机(1)跑步系统的电机的运行,所述感应控制系统(9)预置有安全控制方法,其第一种安全控制方法是:当感应控制系统(9)接收并分析出锻炼者左手已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时锻炼者右手已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)正常运行,当感应控制系统(9)接收并分析出锻炼者左手已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、或锻炼者右手已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)电机减速运行或限速运行,当感应控制系统(9)接收并分析出锻炼者左手没有抓住抓紧其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时锻炼者右手没有抓住抓紧其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)电机停止运行。
[0011]
所述左扶手传感器(7)和右扶手传感器(8)是线型压力传感器,当锻炼者左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上的任何一处时,左扶手传感器(7)都能感应出来,当锻炼者右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上的任何一处时,右扶手传感器(8)都能感应出来;所述线型压力传感器的配置方法是:在高扶手杆(6)左侧一半杆体和左竖扶手杆(4)的外侧上配置有n个独立的同型号压力传感器,或在其杆体上开出n个孔、n个孔内各自套置固定一个同型号压力传感器,n个压力传感器外侧配置有用于锻炼者抓手用的、坚固
的、受力时不会弯曲的金属条片或非金属条片,金属条片或非金属条片是分段的或多片的以增加检测敏感度,在锻炼者左手抓住抓紧高扶手杆(6)左侧一半杆体或左竖扶手杆(4)时,必定同时抓住抓紧金属条片或非金属条片、这样金属条片或非金属条片受压,由于其本身受力后不会弯曲,其压力必定作用于所述n个压力传感器上中的一个或二个或多个上,从而测定锻炼者左手有无抓杆及其抓杆力度,所述高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上的n个压力传感器通过独立的数据线与感应控制系统(9)连接、以把检测数据传导到感应控制系统(9)上;在高扶手杆(6)右侧一半杆体和右竖扶手杆(5)的外侧上配置有n个独立的同型号压力传感器,或在其杆体上开出n个孔、n个孔内各自套置固定一个同型号压力传感器,n个压力传感器外侧配置有用于锻炼者抓手用的、坚固的、受力时不会弯曲的金属条片或非金属条片,金属条片或非金属条片是分段的或多片的以增加检测敏感度,在锻炼者抓住抓紧高扶手杆(6)右侧一半杆体或右竖扶手杆(5)时,必定同时抓住抓紧金属条片或非金属条片、这样金属条片或非金属条片受压,由于其本身受力后不会弯曲,其压力必定作用于所述n个压力传感器上中的一个或二个或多个上,从而测定锻炼者有无抓杆及其抓杆力度,所述高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上的n个压力传感器通过独立的数据线与感应控制系统(9)连接、以把检测数据传导到感应控制系统(9)上。
[0012]
所述感应控制系统(9)判断锻炼者左手是否已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、和或锻炼者右手是否已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)的标准是:抓杆力度达到2kg以上。
[0013]
所述电动跑步机(1)机架上、左立柱(2)上、右立柱(3)上、左竖扶手杆(4)上、右竖扶手杆(5)上、高扶手杆(6)上和或电动跑步机(1)左右横扶手上配置有人体防摔倒装置,人体防摔倒装置由用于绑定锻炼者身体的胸腹臀腿等部位的防护背心或短裤或护腰带(10)、和一端绑定在电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端绑定在防护背心或短裤或护腰带(10)上的可调节长度的n根安全带(11)构成,锻炼者锻炼前把防护背心或短裤或护腰带(10)绑在或穿在身上并调整好n根安全带(11)的长度,这样就可以预防万一锻炼者摔倒时人体也不会摔倒在电动倒走机(1)的跑步台上和或与电动跑步机(1)各部件发生碰撞,使锻炼更安全,所述n根安全带(11)是弹性限长安全带,弹性限长安全带是指安全带(11).既有弹性又只能拉伸到限定长度,其拉伸限定长度为5-20cm、即如果原始状态不拉伸时安全带长度为l,则在拉伸状态下可以加长5-20cm,这样在锻炼者锻炼时n根安全带(11)既不会大幅摇晃又不会在人体摔倒下摔在地上;弹性限长安全带由具伸缩功能的弹力带和没有伸缩功能的安全带组合而成,其中没有伸缩功能的安全带的长度比原始状态下的有伸缩功能的弹力带长5-20cm,在高扶手杆(6)高度和人体高度都不变的情况下通过缩减安全带(11)的长度,由于弹性的存在安全带(11)就具有压力。
[0014]
所述防护背心或短裤或护腰带(10)内配置有多个传感器,所述防护背心或短裤或护腰带(10)内配置的传感器是红外线传感器和或压力传感器和或温度传感器、用于检测感应防护背心或短裤或护腰带(10)有否已经安全绑定到锻炼者身上,并把检测感应结果通过数据线传送到感应控制系统(9)上,所述n根安全带(11)内各自配置有多个传感器,n根安全带(11)内配置的传感器是
压力传感器、用于检测感应n根安全带(11)各自承受的压力值,在安全带(11)一端安全连接到电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端在高扶手杆(6)高度和人体高度都不变的情况下缩减长度后安全连接在防护背心或短裤或护腰带上时,该安全带(11)就具有压力,同时对应安全带传感器可以检测出压力值,在安全带(11)一端没有安全连接到电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端没有安全连接在防护背心或短裤或护腰带(10)上,或安全带(11)没有缩减长度时,其压力值就是零,并通过对应的安全带传感器把上述压力值通过数据线传送到感应控制系统(9)上,由此带来第二种、第三种和第四种安全控制方法,其第二种安全控制方法是:在满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、同时锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、该n根安全带(11)各自产生1kg以上的压力”这二个条件中的一个时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件都不能得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行;其第三种安全控制方法是:在同时满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、同时锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、该n根安全带(11)各自产生1kg以上的压力”这二个条件时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件不能同时得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行;其第四种安全控制方法是:在同时满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、或锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、且该n根安全带(11)各自产生1kg以上的压力”这二个条件时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件不能同时得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行。
[0015]
所述感应控制系统(9)还包括锻炼者信息输入、存储及处理模块,信息输入、存储及处理模块用于输入和存储不同锻炼者的身体资料和运动资料、并设定n种不同锻炼者的安全控制方法,其信息输入方法是手工输入出生年月、身高、体重、心率、血压、呼吸速率、体温、血糖、血氧饱和度和或肺活量等数据、和或电脑身份验证、和或人脸识别和或电脑人体体态判断(姿势是否标准、动作是否熟练)等,并根据不同锻炼者的身体资料和运动资料安排合理的安全控制方法,不同锻炼者的安全要求或标准是:安全要求或标准1、年老体弱者及初始倒走锻炼者必须在绑定人体防摔倒装置后,同时左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)才能进行运动锻炼,其对应的安全控制方法是第三种安全控制方法;安全要求或标准2、有一定锻炼基础的中老年人必须在绑定人体防摔倒装置后,同
时起码有一只手抓住抓紧竖扶手杆或高扶手杆(或左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、或右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)),其对应的安全控制方法是第四种安全控制方法;安全要求或标准3、年富力强者允许在没绑定人体防摔倒装置情况下,左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)进行运动锻炼,其对应的安全控制方法是第一种安全控制方法;安全要求或标准4、年富力强者可以在绑定人体防摔倒装置后双手都不抓杆(双手都自由摇摆)进行运动锻炼,其对应的安全控制方法是第二种安全控制方法,以上不同锻炼者的身体资料和运动资料及不同锻炼者的安全要求或标准可通过网络传送到云服务器,并由云服务器控制本终端。
[0016]
所述感应控制系统(9)预置有控制电动跑步机(1)电机运行速度的程序用于控制电动跑步机(1)电机的正常运行、减速运行、限速运行和或停止运行,其控制电动跑步机(1)电机进行正常运行、减速运行、限速运行操作的标准是:标准1、年老体弱者及初始倒走锻炼者在本机上锻炼时正常速度不超过3公里每小时、减速的幅度为30%、限速的数值为最高速度不超过每小时2公里;标准2、有一定锻炼基础的中老年人在本机上锻炼时正常速度不超过5公里每小时、减速的幅度为40%、限速的数值为最高速度不超过每小时3公里;标准3、年富力强者在左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)在本机上进行锻炼时,正常速度不超过8公里每小时、减速的幅度为50%、限速的数值为最高速度不超过每小时4公里;标准4、年富力强者在绑定人体防摔倒装置后在本机上进行锻炼时正常速度不超过8公里每小时、减速的幅度为50%,限速的数值为最高速度不超过每小时4公里。
[0017]
所述左扶手传感器(7)和或右扶手传感器(8)和或防护背心或短裤或护腰带(10)上的传感器配置有心率和或血压检测功能并在感应控制系统(9)上预置有心率和血压标准,用于检测感应锻炼者的心率和或血压情况:心率是否过快或过慢、心率是否整齐、血压是否正常,并在判断出锻炼者存在心率、血压等安全隐患时,感应控制系统(9)控制电动跑步机(1)电机停止运行;所述左扶手传感器(7)和或右扶手传感器(8)和或防护背心或短裤或护腰带(10)上的传感器检测感应锻炼者的心率血压情况的功能可以用现有技术的智能手环、胸带或手表替代。
[0018]
所述电动跑步机(1)的跑台可以调节前后坡度;所述电动跑步机(1)左右横扶手、左立柱(2)或和右立柱(3)上也可以配置扶手传感器;所述左立柱(2)和左竖扶手杆(4)可以合二为一、右立柱(3)与右竖扶手杆(5)可以合二为一,此时,各自合二为一的左右竖扶手杆上配置有一根可以根据锻炼者不同身高上下移动并固定的高扶手;所述左竖扶手杆(4)和右竖扶手杆(5)的顶端都向后弯曲;所述左立柱(2)和左竖扶手杆(4)与右立柱(3)和右竖扶手杆(5)之间对称或非对称;所述左竖扶手杆(4)、右竖扶手杆(5)和高扶手杆(6)整体调节高度的调节方法是人工的或电动的;所述人体防摔倒装置可以安装在另行配置的防摔倒装置专用架或专用杆上;所述人体防摔倒装置可以拆装;所述扶手传感器和防摔倒传感器与感应控制系统(9)之间的信号传送方式是有线连接或无线连接;所述感应控制系统(9)上还配置有指示灯或和警报器,用于提醒。
[0019]
所述本发明的安全控制方法适用于倒走倒跑的电动倒走机、正走正跑的电动跑步机、正走正跑和倒走倒跑双功能的电动跑步机、健身房以及共享型安全健身平台上。
[0020]
与现有技术相比,本发明的基于安全才可正常运行的电动倒走机及其安全控制方法的有益效果是:
[0021]
由于确保了只有在绝对安全的情况下才允许锻炼者进行正常速度的倒走锻炼,从而保证了锻炼者倒走锻炼时的绝对安全,有效避免了运动伤害的发生,同时,锻炼者双手平举、高举或向前向上举起对应抓住竖扶手杆或高扶手杆进行锻炼会带来了更好的锻炼效果。
附图说明
[0022]
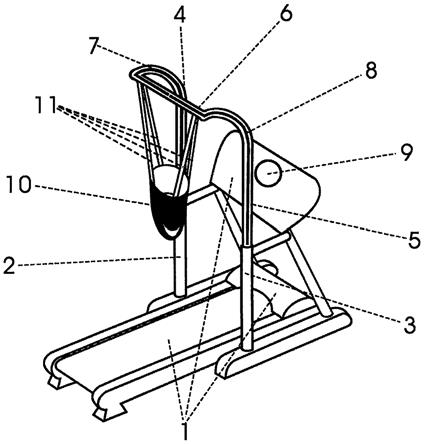
图1为本发明结构示意图(图中左竖扶手杆和右竖扶手杆中的黑线代表线型传感器的触手条)。
[0023]
图2为本发明竖扶手杆或高扶手杆与压力传感器、数据线、感应控制系统之间结构示意图。
[0024]
图3为本发明安全带(11)构成及其拉伸前后结构和效果图。
[0026]
其中:1、电动跑步机;2、左立柱;3、右立柱;4、左竖扶手杆;5、右竖扶手杆;6、高扶手杆;7、左扶手传感器;8、右扶手传感器;9、感应控制系统;10、防护背心或短裤或护腰带;11、安全带。
具体实施方式
[0026]
下面结合附图和实施例,对本发明的具体实施方式作进一步的详细描述。
[0027]
图1示出了本发明结构示意图,图2示出了本发明竖扶手杆或高扶手杆与压力传感器、数据线、感应控制系统之间结构示意图,图3示出了本发明安全带(11)构成及其拉伸前后结构和效果图,本发明实施例的基于安全才可正常运行的电动倒走机及其安全控制方法,包括:电动跑步机(1)、左立柱(2)、右立柱(3)、左竖扶手杆(4)、右竖扶手杆(5)、高扶手杆(6)、左扶手传感器(7)、右扶手传感器(8)、感应控制系统(9),其特征是:所述电动跑步机(1)是一台电动倒走机,即电动跑步机(1)上的跑带的行进方向是向着电动跑步机(1)控制面板方向行进的,这样当锻炼者面向电动跑步机(1)控制面板进行锻炼时脚步必须向后迈出从而达到面向电动跑步机(1)控制面板进行倒走锻炼的效果(如果双脚不动整个人就会顺着跑带的方向前移进而与电动跑步机(1)控制面板相碰撞的),常见电动跑步机的跑带的行进方向是由电动跑步机电机控制的,通过互换电动跑步机电机电源输入端火线和零线就可以改变电动跑步机电机转轴的旋转方向进而把跑带向后走从而带来正走正跑功能的电动跑步机改变为跑带向前走从而带来倒走倒跑功能的电动倒走机,所述电动跑步机(1)左侧的左底架上固定安装有与电动跑步机(1)左横扶手连接固定的竖立的左立柱(2),左立柱(2)高度等于或高于电动跑步机(1)左横扶手的高度,所述电动跑步机(1)右侧的右底架上固定安装有与电动跑步机(1)右横扶手连接固定的竖立的右立柱(3),右立柱(3)高度等于或高于电动跑步机(1)右横扶手的高度,左立柱(2)和右立柱(3)都是空心的,左竖扶手杆(4)与左立柱(2)配套、并套装在左立柱(2)里面并可调节高度并用卡扣、旋扣或用螺丝固定,右竖扶手杆(5)与右立柱(3)配套、并套装在右立柱(3)里
面并可调节高度并用卡扣、旋扣或用螺丝固定,左竖扶手杆(4)和右竖扶手杆(5)顶端之间或其上面固定或非固定连接有一根的高扶手杆(6),通过调节左竖扶手杆(4)和右竖扶手杆(5)的高度并固定可调节高扶手杆(6)的高度,高扶手杆(6)左侧一半杆体和左竖扶手杆(4)用于锻炼者面向电动跑步机(1)控制面板进行锻炼时左手抓扶用,高扶手杆(6)右侧一半杆体和右竖扶手杆(5)用于锻炼者面向电动跑步机(1)控制面板进行锻炼时右手抓扶用,当锻炼者面向电动跑步机(1)控制面板单手或双手各自平举、高举或向前向上举起左手抓住高扶手杆(6)左侧一半杆体或左竖扶手杆(4)、和或右手抓住高扶手杆(6)右侧一半杆体或右竖扶手杆(5)进行倒走锻炼时,不仅更安全而且锻炼效果更好,所述高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上配置有左扶手传感器(7),所述高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上配置有右扶手传感器(8),左扶手传感器(7)用于检测感应锻炼者的左手是否已经抓住抓紧了高扶手杆(6)左侧一半杆体或左竖扶手杆(4),并把检测感应结果通过独立的数据线传送到感应控制系统(9)上,右扶手传感器(8)用于检测感应锻炼者的右手是否已经抓住抓紧了高扶手杆(6)右侧一半杆体或右竖扶手杆(5),并把检测感应结果通过独立的数据线传送到感应控制系统(9)上,所述感应控制系统(9)用于接收和或分析左扶手传感器(7)和或右扶手传感器(8)传送来的锻炼者左手和或右手的抓杆情况,其左手和或右手的抓杆情况包括:左手有否抓住高扶手杆(6)左侧一半杆体或左竖扶手杆(4)及其抓杆力度大小、右手有否抓住高扶手杆(6)右侧一半杆体或右竖扶手杆(5)及其抓杆力度大小,所述感应控制系统(9)内置在电动跑步机(1)控制系统里或单片机里或集成电路里或机载电脑里、并根据接收和或分析出的锻炼者左手和或右手的抓杆情况控制电动跑步机(1)跑步系统的电机的运行,所述感应控制系统(9)预置有安全控制方法,其第一种安全控制方法是:当感应控制系统(9)接收并分析出锻炼者左手已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时锻炼者右手已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)正常运行,当感应控制系统(9)接收并分析出锻炼者左手已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、或锻炼者右手已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)电机减速运行或限速运行,当感应控制系统(9)接收并分析出锻炼者左手没有抓住抓紧其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时锻炼者右手没有抓住抓紧其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)时,感应控制系统(9)控制电动跑步机(1)电机停止运行。
[0028]
所述左扶手传感器(7)和右扶手传感器(8)是线型压力传感器,当锻炼者左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上的任何一处时,左扶手传感器(7)都能感应出来,当锻炼者右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上的任何一处时,右扶手传感器(8)都能感应出来;所述线型压力传感器的配置方法是:在高扶手杆(6)左侧一半杆体和左竖扶手杆(4)的外侧上配置有n个独立的同型号压力传感器,或在其杆体上开出n个孔、n个孔内各自套置固定一个同型号压力传感器,n个压力传感器外侧配置有用于锻炼者抓手用的、坚固
的、受力时不会弯曲的金属条片或非金属条片,金属条片或非金属条片是分段的或多片的以增加检测敏感度,在锻炼者左手抓住抓紧高扶手杆(6)左侧一半杆体或左竖扶手杆(4)时,必定同时抓住抓紧金属条片或非金属条片、这样金属条片或非金属条片受压,由于其本身受力后不会弯曲,其压力必定作用于所述n个压力传感器上中的一个或二个或多个上,从而测定锻炼者左手有无抓杆及其抓杆力度,所述高扶手杆(6)左侧一半杆体和左竖扶手杆(4)上的n个压力传感器通过独立的数据线与感应控制系统(9)连接、以把检测数据传导到感应控制系统(9)上;在高扶手杆(6)右侧一半杆体和右竖扶手杆(5)的外侧上配置有n个独立的同型号压力传感器,或在其杆体上开出n个孔、n个孔内各自套置固定一个同型号压力传感器,n个压力传感器外侧配置有用于锻炼者抓手用的、坚固的、受力时不会弯曲的金属条片或非金属条片,金属条片或非金属条片是分段的或多片的以增加检测敏感度,在锻炼者抓住抓紧高扶手杆(6)右侧一半杆体或右竖扶手杆(5)时,必定同时抓住抓紧金属条片或非金属条片、这样金属条片或非金属条片受压,由于其本身受力后不会弯曲,其压力必定作用于所述n个压力传感器上中的一个或二个或多个上,从而测定锻炼者有无抓杆及其抓杆力度,所述高扶手杆(6)右侧一半杆体和右竖扶手杆(5)上的n个压力传感器通过独立的数据线与感应控制系统(9)连接、以把检测数据传导到感应控制系统(9)上。
[0029]
所述感应控制系统(9)判断锻炼者左手是否已经抓住抓紧了其对应的高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、和或锻炼者右手是否已经抓住抓紧了其对应的高扶手杆(6)右侧一半杆体和右竖扶手杆(5)的标准是:抓杆力度达到2kg以上。
[0030]
所述电动跑步机(1)机架上、左立柱(2)上、右立柱(3)上、左竖扶手杆(4)上、右竖扶手杆(5)上、高扶手杆(6)上和或电动跑步机(1)左右横扶手上配置有人体防摔倒装置,人体防摔倒装置由用于绑定锻炼者身体的胸腹臀腿等部位的防护背心或短裤或护腰带(10)、和一端绑定在电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端绑定在防护背心或短裤或护腰带(10)上的可调节长度的n根安全带(11)构成,锻炼者锻炼前把防护背心或短裤或护腰带(10)绑在或穿在身上并调整好n根安全带(11)的长度,这样就可以预防万一锻炼者摔倒时人体也不会摔倒在电动倒走机(1)的跑步台上和或与电动跑步机(1)各部件发生碰撞,使锻炼更安全,所述n根安全带(11)是弹性限长安全带,弹性限长安全带是指安全带(11)既有弹性又只能拉伸到限定长度,其拉伸限定长度为5-20cm、即如果原始状态不拉伸时安全带长度为l,则在拉伸状态下可以加长5-20cm,这样在锻炼者锻炼时n根安全带(11)既不会大幅摇晃又不会在人体摔倒下摔在地上;弹性限长安全带由具伸缩功能的弹力带和没有伸缩功能的安全带组合而成,其中没有伸缩功能的安全带的长度比原始状态下的有伸缩功能的弹力带长5-20cm,在高扶手杆(6)高度和人体高度都不变的情况下通过缩减安全带(11)的长度,由于弹性的存在安全带(11)就具有压力。
[0031]
所述防护背心或短裤或护腰带(10)内配置有多个传感器,所述防护背心或短裤或护腰带(10)内配置的传感器是红外线传感器和或压力传感器和或温度传感器、用于检测感应防护背心或短裤或护腰带(10)有否已经安全绑定到锻炼者身上,并把检测感应结果通过数据线传送到感应控制系统(9)上,所述n根安全带(11)内各自配置有多个传感器,n根安全带(11)内配置的传感器是
压力传感器、用于检测感应n根安全带(11)各自承受的压力值,在安全带(11)一端安全连接到电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端在高扶手杆(6)高度和人体高度都不变的情况下缩减长度后安全连接在防护背心或短裤或护腰带上时,该安全带(11)就具有压力,同时对应安全带传感器可以检测出压力值,在安全带(11)一端没有安全连接到电动跑步机(1)机架上和或左立柱(2)上和或右立柱(3)上和或左竖扶手杆(4)上和或右竖扶手杆(5)上和或高扶手杆(6)上和或电动跑步机(1)左右横扶手上、另一端没有安全连接在防护背心或短裤或护腰带(10)上,或安全带(11)没有缩减长度时,其压力值就是零,并通过对应的安全带传感器把上述压力值通过数据线传送到感应控制系统(9)上,由此带来第二种、第三种和第四种安全控制方法,其第二种安全控制方法是:在满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、同时锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、该n根安全带(11)各自产生1kg以上的压力”这二个条件中的一个时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件都不能得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行;其第三种安全控制方法是:在同时满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、同时锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、该n根安全带(11)各自产生1kg以上的压力”这二个条件时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件不能同时得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行;其第四种安全控制方法是:在同时满足“感应控制系统(9)接收和或分析出锻炼者左手的抓杆力度达到2kg以上、或锻炼者右手的抓杆力度达到2kg以上”和“感应控制系统(9)接收并分析出锻炼者已经把防护背心或短裤或护腰带(10)安全绑定或穿在身上、且该n根安全带(11)各自产生1kg以上的压力”这二个条件时,感应控制系统(9)控制电动跑步机(1)电机正常运行,当上述二个条件不能同时得到满足时,感应控制系统(9)控制电动跑步机(1)电机停止运行。
[0032]
所述感应控制系统(9)还包括锻炼者信息输入、存储及处理模块,信息输入、存储及处理模块用于输入和存储不同锻炼者的身体资料和运动资料、并设定n种不同锻炼者的安全控制方法,其信息输入方法是手工输入出生年月、身高、体重、心率、血压、呼吸速率、体温、血糖、血氧饱和度和或肺活量等数据、和或电脑身份验证、和或人脸识别和或电脑人体体态判断(姿势是否标准、动作是否熟练)等,并根据不同锻炼者的身体资料和运动资料安排合理的安全控制方法,不同锻炼者的安全要求或标准是:安全要求或标准1、年老体弱者及初始倒走锻炼者必须在绑定人体防摔倒装置后,同时左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)才能进行运动锻炼,其对应的安全控制方法是第三种安全控制方法;安全要求或标准2、有一定锻炼基础的中老年人必须在绑定人体防摔倒装置后,同
时起码有一只手抓住抓紧竖扶手杆或高扶手杆(或左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、或右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)),其对应的安全控制方法是第四种安全控制方法;安全要求或标准3、年富力强者允许在没绑定人体防摔倒装置情况下,左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)进行运动锻炼,其对应的安全控制方法是第一种安全控制方法;安全要求或标准4、年富力强者可以在绑定人体防摔倒装置后双手都不抓杆(双手都自由摇摆)进行运动锻炼,其对应的安全控制方法是第二种安全控制方法,以上不同锻炼者的身体资料和运动资料及不同锻炼者的安全要求或标准可通过网络传送到云服务器,并由云服务器控制本终端。
[0033]
所述感应控制系统(9)预置有控制电动跑步机(1)电机运行速度的程序用于控制电动跑步机(1)电机的正常运行、减速运行、限速运行和或停止运行,其控制电动跑步机(1)电机进行正常运行、减速运行、限速运行操作的标准是:标准1、年老体弱者及初始倒走锻炼者在本机上锻炼时正常速度不超过3公里每小时、减速的幅度为30%、限速的数值为最高速度不超过每小时2公里;标准2、有一定锻炼基础的中老年人在本机上锻炼时正常速度不超过5公里每小时、减速的幅度为40%、限速的数值为最高速度不超过每小时3公里;标准3、年富力强者在左手抓住抓紧高扶手杆(6)左侧一半杆体和左竖扶手杆(4)、同时右手抓住抓紧高扶手杆(6)右侧一半杆体和右竖扶手杆(5)在本机上进行锻炼时,正常速度不超过8公里每小时、减速的幅度为50%、限速的数值为最高速度不超过每小时4公里;标准4、年富力强者在绑定人体防摔倒装置后在本机上进行锻炼时正常速度不超过8公里每小时、减速的幅度为50%,限速的数值为最高速度不超过每小时4公里。
[0034]
所述左扶手传感器(7)和或右扶手传感器(8)和或防护背心或短裤或护腰带(10)上的传感器配置有心率和或血压检测功能并在感应控制系统(9)上预置有心率和血压标准,用于检测感应锻炼者的心率和或血压情况:心率是否过快或过慢、心率是否整齐、血压是否正常,并在判断出锻炼者存在心率、血压等安全隐患时,感应控制系统(9)控制电动跑步机(1)电机停止运行;所述左扶手传感器(7)和或右扶手传感器(8)和或防护背心或短裤或护腰带(10)上的传感器检测感应锻炼者的心率血压情况的功能可以用现有技术的智能手环、胸带或手表替代。
[0035]
所述电动跑步机(1)的跑台可以调节前后坡度;所述电动跑步机(1)左右横扶手、左立柱(2)或和右立柱(3)上也可以配置扶手传感器;所述左立柱(2)和左竖扶手杆(4)可以合二为一、右立柱(3)与右竖扶手杆(5)可以合二为一,此时,各自合二为一的左右竖扶手杆上配置有一根可以根据锻炼者不同身高上下移动并固定的高扶手;所述左竖扶手杆(4)和右竖扶手杆(5)的顶端都向后弯曲;所述左立柱(2)和左竖扶手杆(4)与右立柱(3)和右竖扶手杆(5)之间对称或非对称;所述左竖扶手杆(4)、右竖扶手杆(5)和高扶手杆(6)整体调节高度的调节方法是人工的或电动的;所述人体防摔倒装置可以安装在另行配置的防摔倒装置专用架或专用杆上;所述人体防摔倒装置可以拆装;所述扶手传感器和防摔倒传感器与感应控制系统(9)之间的信号传送方式是有线连接或无线连接;所述感应控制系统(9)上还配置有指示灯或和警报器,用于提醒。
[0036]
所述本发明的安全控制方法适用于倒走倒跑的电动倒走机、正走正跑的电动跑步机、正走正跑和倒走倒跑双功能的电动跑步机、健身房以及共享型安全健身平台上。
[0037]
最后,还需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有很多变形,本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1