一种带摄像头可遥控的四驱智能小车的制作方法
1.本实用新型涉及智能玩具小车技术领域,尤其涉及一种带摄像头可遥控的四驱智能小车。
背景技术:
2.市场上的智能玩具机器人小车层出不穷,但是通常人机互动方式较为单一,影响了用户的满意度。
技术实现要素:
3.本实用新型提供了一种带摄像头可遥控的四驱智能小车,旨在解决上述问题。
4.根据本技术实施例提供的一种带摄像头可遥控的四驱智能小车,包括:车身组件、舵机、ap摄像头组件、控制模块、电池、四个车轮和四个电机;所述车身组件包括上下间隔设置的上支撑板和下支撑板,所述车轮可转动安装于所述车身组件上;每个所述电机均与一个所述车轮传动连接,四个所述电机均连接于所述控制模块;所述电机安装在所述下支撑板上;所述舵机安装在所述上支撑板上,所述ap摄像头组件连接与所述舵机;所述电池和所述ap摄像头模块均连接于所述控制模块,所述电池安装在所述车身组件上;所述控制模块包括用于接收遥控器信号的红外线接收头;所述ap摄像头用于连接移动终端和摄像。
5.在本实用新型的带摄像头可遥控的四驱智能小车中,还包括安装支架,所述ap摄像头模块通过所述安装支架连接于所述舵机。
6.在本实用新型的带摄像头可遥控的四驱智能小车中,还包括超声波模块,所述超声波模块设置于所述安装支架朝向小车前方的位置处。
7.在本实用新型的带摄像头可遥控的四驱智能小车中,所述安装支架为l形,所述安装支架包括呈角度连接的第一壁和第二壁,所述第一壁固定在所述舵机的转动柱上,所述ap摄像头模块安装于所述第二壁上。
8.在本实用新型的带摄像头可遥控的四驱智能小车中,所述超声波模块安装于所述第二壁朝向小车前方的一侧。
9.在本实用新型的带摄像头可遥控的四驱智能小车中,还包括循迹模块,所述循迹模块设置于所述下支撑板朝向地面的一侧。
10.在本实用新型的带摄像头可遥控的四驱智能小车中,所述车身组件还包括多个定位柱,所述定位柱穿过所述上支撑板和所述下支撑板。
11.本技术实施例提供的技术方案可以包括以下有益效果:本技术设计了一种带摄像头可遥控的四驱智能小车,可以提升人机交互的方式。
附图说明
12.为了更清楚地说明本实用新型实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于
本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
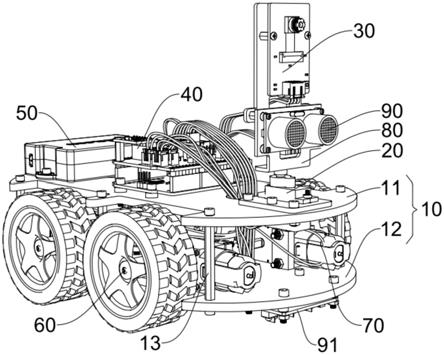
13.图1是本实用新型实施例的小车的一个视角的结构示意图;
14.图2是本实用新型实施例的小车的另一个视角的结构示意图。
15.标号说明:
16.10、车身组件;11、上支撑板;12、下支撑板;13、定位柱;20、舵机;30、ap摄像头组件;40、控制模块;41、红外线接收头;50、电池;60、车轮;70、电机;80、安装支架;81、第一壁;82、第二壁;90、超声波模块;91、循迹模块。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.还应当理解,在此本实用新型说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本实用新型。如在本实用新型说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
19.还应当进一步理解,在本实用新型说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
20.请参照图1和图2所示,本实用新型公开了一种带摄像头可遥控的四驱智能小车,包括车身组件10、舵机20、ap摄像头组件30、控制模块40、电池50、四个车轮60和四个电机70。车身组件10包括上下间隔设置的上支撑板11和下支撑板12,舵机20安装在上支撑板的上方,车轮可转动安装于车身组件上,并且每个电机均与一个车轮传动连接,即每个车轮由一个电机控制,提升了小车的爬坡能力。四个电机均连接于控制模块,通过控制模块来控制电机的运行,从而控制车轮转动。电池安装在车身组件上。控制模块包括用于接收遥控器信号的红外线接收头41,ap摄像头用于连接移动终端和摄像。本技术即可以通过遥控器来控制小车,还可以通过移动终端来控制小车。ap摄像头内部自带有wifi热点,不需要第三方网络转换也可以连接到手机,增加了小车的应用场合。ap摄像头还能够用于摄像,用户可以在手机上获取图像视频流,以查看小车周围的环境,以方便用户控制小车。本技术可以通过模式切换按键来实现功能的切换,切换为手机控制或遥控器控制。
21.在一个可选的实施例中,本技术的智能小车还包括安装支架80,摄像头模块通过安装支架连接于舵机。具体地,安装支架连接于舵机,安装支架可以随着舵机转动柱的转动而转动,摄像头模块设置在安装支架上。
22.在一个可选的实施例中,安装支架80为l形,安装支架包括呈角度连接的第一壁81和第二壁82,第一壁固定在舵机的转动柱上,ap摄像头模块安装于第二壁上。具体地,第一壁和第二壁之间的夹角可以为锐角、直角和钝角中的任一种,这个可以根据实际情况来设置在此不做限制,图中的第一壁和第二壁之间的夹角为锐角。ap摄像头模块设置在第二壁
朝向小车后方的一侧面。
23.本实施例中,还包括超声波模块90和循迹模块91,超声波模块和循迹模块均连接于控制模块,超声波模块设置在安装支架朝向小车前方的位置处。具体地,超声波模块设置在安装支架上第二壁朝向前方的一侧面。循迹模块设置在下支撑板朝向地面的一侧面上。循迹模块设置在靠近小车前轮的一端。控制模块内置有控制循迹模块的程序,通过循迹模块的红外传感器对地检测区分黑白轨迹,实现小车循迹运动。通过控制模块的内置程序控制超声波模块进行数据检测,判断前方是否有障碍物,从而实现小车避障运动。通过控制模块内置程序控制超声波模块进行数据检测,判断前方是否有障碍物,以实现小车跟随障碍物移动。
24.本技术的车身组件10还包括多个定位柱13,定位柱穿过上支撑板和下支撑板。具体地,定位柱的数量设置有6个,左右各3个定位柱。定位柱位于上支撑板和下支撑板之间的部分的直径大于插入到上支撑板和下支撑板之间的部分直径,最后再通过螺丝将定位柱固定在上支撑架和下支撑架上,固定牢靠。上支撑板和下支撑板对应车轮的位置处设置有凹槽部,以避免上支撑板和下支撑板对车轮的影响。本技术采用了上支撑板和下支撑板,也同时使得小车具有较大的扩展平台,可以上支撑板和下支撑板上设置一些积木点,以提升小车的扩展性。
25.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1