一种智能调节体操杠
1.本实用新型属于运动器材领域,具体涉及一种智能调节体操杠。
背景技术:
2.体操杠用于体操体育锻炼,是一种常见的运动器材,在一些室外场地中一般设置有不同高度的体操杠供不同身高的使用者参与运动,但随着经济的发展,人们物质水平的提高,室内运动场馆日益增多,室内场馆空间有限,为了能够使不同身高的人参与体操运动,可以调节高度的体操杠开始在市场中出现。
3.现有的高度可调节体操杠一般分为机械调节和电动调节两种,机械调节结构简单,但制作时考虑体操杠的耐用性体操杠较重,调节较为困难;
4.现有的电动调节体操杠一般用电机作为驱动设备,在进行体操运动时,使用者的体操动作多为下压体操杠,从而易导致电机轴损坏,影响体操杠使用寿命。
技术实现要素:
5.本实用新型为解决上述问题,提供了一种智能调节体操杠,设置有用于高度调节的伸展机构和用于承担运动压力的限位机构,以及自动调节高度的控制单元,使用便捷,结构简单,稳定性强。
6.为了实现上述目的,本实用新型的技术方案是:
7.一种智能调节体操杠,包括两个支杆和设置在两个所述支杆之间的横杆,所述支杆为内部中空的圆柱形杆,所述横杆呈倒置的凵字形圆管状结构,横杆的两竖直段对应置入两支杆内部,横杆的竖直段底部设置有限位机构,所述限位机构用于支杆与横杆固定,所述限位机构底部设置伸展机构,所述伸展机构用于拉动横杆的竖直段在支杆内滑动;
8.限位机构与伸展机构配置有控制单元,所述控制单元用于控制限位机构和伸展机构调节支杆和横杆的相对位置。
9.进一步地位机构包括连接杆和限位块,所述连接杆呈内部中空的阶梯圆柱状结构,连接杆的小径端与横杆的竖直段通过螺纹固定,连接杆的大径端与伸展机构固定;
10.所述限位块包括两个设置于连接杆大径端内部的磁扣,两所述磁扣均为阶梯圆柱状,磁扣的大径端设置于连接杆内部,且大径端之间设置有压簧,磁扣的小径端在压簧作用下处于连接杆外部,所述磁扣为电磁铁;
11.对应所述磁扣所述支杆等距开设有多个圆形的限位孔。
12.进一步地,所述支杆外侧对照限位孔套设有多个环套,所述环套为圆环状,环套与支杆为一体化结构。
13.进一步地,所述伸展机构包括电动推杆,所述电动推杆的下端连接有底座,电动推杆的伸出端与连接杆固定。
14.进一步地,所述控制单元包括mcu芯片、驱动芯片和按键单元,所述mcu芯片的输入单元连接按键单元,所述按键单元设置于支杆外侧,按键单元用于输入控制指令;
15.mcu芯片的输出端连接驱动芯片,所述驱动芯片的输出端连接电动推杆,驱动芯片通过mcu芯片的驱动信号控制两个所述电动推杆同步升、降。
16.进一步地,所述mcu芯片与磁扣之间设置有光耦驱动电路,所述磁扣通过光耦驱动电路连接电源形成回路。
17.通过上述技术方案,本实用新型的有益效果为:
18.本实用新型设置有限位机构,所述限位机构用于支杆与横杆固定,所述限位机构底部设置伸展机构,所述伸展机构用于拉动横杆的竖直段在支杆内滑动;
19.限位机构与伸展机构配置有控制单元,所述控制单元用于控制限位机构和伸展机构调节支杆和横杆的相对位置。
20.作业时,控制单元控制伸展机构伸长,伸展机构推动横杆向上,因此体操杠增高,控制单元控制伸展机构缩短,伸展机构拉动横杆向下,因此体操杠降低,从而实现体操杠高度调节;
21.控制单元在使伸展机构移动到预设位置后,控制单元使限位机构工作,限位机构使支杆与横杆固定从而完成体操杠高度固定,在进行体育运动时限位机构承担运动产生的压力,从而避免伸展机构因压力作用出现反向运动造成设备损坏。
附图说明
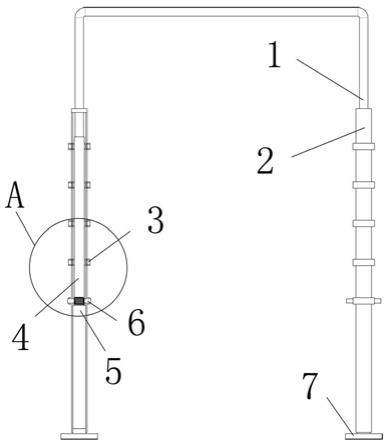
22.图1是本实用新型一种智能调节体操杠的结构示意图之一;
23.图2是本实用新型一种智能调节体操杠的结构示意图之二;
24.图3是图1中a处放大图;
25.图4是本实用新型一种智能调节体操杠的电气原理图。
26.附图标号:1为横杆,2为支杆,3为环套,4为连接杆,5为电动推杆,6为磁扣,7为底座,8为mcu芯片,9为驱动芯片,10为按键单元。
具体实施方式
27.下面结合附图和具体实施方式对本实用新型作进一步说明:
28.实施例1
29.如图1~4所示,一种智能调节体操杠,包括两个支杆2和设置在两个所述支杆2之间的横杆1,所述支杆2为内部中空的圆柱形杆,所述横杆1呈倒置的凵字形圆管状结构,横杆1的两竖直段对应置入两支杆2内部,横杆1的竖直段底部设置有限位机构,所述限位机构用于支杆2与横杆1固定,所述限位机构底部设置伸展机构,所述伸展机构用于拉动横杆1的竖直段在支杆2内滑动;
30.限位机构与伸展机构配置有控制单元,所述控制单元用于控制限位机构和伸展机构调节支杆2和横杆1的相对位置。
31.本实用新型,采用控制单元结合伸展机构实现体操杆高度的自动调节,无需手动挪动、调节或拆卸调节,省时省力,采用限位机构对调节好的体操杆进行固定从而避免伸展机构受力损坏。
32.实施例2
33.为了实现体操杆自动调节,对产品结构进行优化,具体的:
34.所述限位机构包括连接杆4和限位块,所述连接杆4呈内部中空的阶梯圆柱状结构,连接杆4的小径端与横杆1的竖直段通过螺纹固定,连接杆4的大径端与伸展机构固定;
35.所述限位块包括两个设置于连接杆4大径端内部的磁扣6,两所述磁扣6均为阶梯圆柱状,磁扣6的大径端设置于连接杆4内部,且大径端之间设置有压簧,磁扣6的小径端在压簧作用下处于连接杆4外部,所述磁扣6为电磁铁;
36.对应所述磁扣6所述支杆2等距开设有多个圆形的限位孔。
37.作为一种可实施方式,所述支杆2外侧对照限位孔套设有多个环套3,所述环套3为圆环状,环套3与支杆2为一体化结构。
38.作为一种可实施方式,所述伸展机构包括电动推杆5,所述电动推杆5的下端连接有底座7,电动推杆5的伸出端与连接杆4固定。
39.作为一种可实施方式,所述控制单元包括mcu芯片8、驱动芯片9和按键单元10,所述mcu芯片8的输入单元连接按键单元10,所述按键单元10设置于支杆2外侧,按键单元10用于输入控制指令;
40.mcu芯片8的输出端连接驱动芯片9,所述驱动芯片9的输出端连接电动推杆5,驱动芯片9通过mcu芯片8的驱动信号控制两个所述电动推杆5同步升、降。
41.作为一种可实施方式,所述mcu芯片8与磁扣6之间设置有光耦驱动电路,所述磁扣6通过光耦驱动电路连接电源形成回路。
42.结合上述实施例对体操杆自动调节进行说明:
43.在本实施例中,所述mcu芯片8具体为stm32单片机,驱动芯片9具体为l289n芯片,按键单元10包括三个按键,k1、k2和k3,其中k1用于输入上升信号,k2用于输入下降信号,k3用于发出限位信号;
44.作业时按下k1,mcu芯片8接收到k1高电平信号通过驱动芯片9使两电动推杆5同时伸长,通过执行mcu芯片8内写入程序,使每按下一次k1电动推杆5伸出端运动的距离与支杆2限位孔的间距相同,同时预先设定磁扣6的位置使磁扣6位于限位孔处,根据需要分次按动k1,使电动推杆5通过连接杆4推动横杆1上升至对应位置;
45.电动推杆5停止工作,此时磁扣6因磁力作用压住压簧位于连接杆4内部,按下k3,mcu芯片8输出低电平信号使光耦驱动电路截止,从而磁扣6断电磁性消失,压簧复位使磁扣6从限位孔穿出,并置于环套3外侧,阻挡横杆1的水平段因受力导致竖直段下压电动推杆5,从而实现体操杆的上升调节。
46.在需要进行电动推杆5反向运动时,以下降为例,电动推杆5收缩,此前首先长按k3,mcu芯片8输出高电平信号使光耦驱动电路导通,磁扣6通电产生磁性挤压压簧处于连接杆4内部;
47.进而按下k2,按照上升作业的设计方式,mcu芯片8通过驱动芯片9驱动两电动推杆5收缩,进而连接杆4拉动横杆1的竖直段下降,将横杆1的水平段置于合适位置后,再次按下k3完成限位操作,从而实现体操杆的下降调节。
48.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1