一种医疗护理用呼吸训练器的制作方法
1.本发明涉及医疗器械技术领域,具体为一种医疗护理用呼吸训练器。
背景技术:
2.心肺功能是人体新陈代谢的基础,与人体的多项功能息息相关,如呼吸功能、内分泌功能、代谢功能等,是维持人体生命不可缺少的重要功能。正常成年男性肺活量约3500毫升,女性约2500毫升,30岁后,肺活量开始减少,每10年下降9%~27%。评判肺功能减退程度的分级标准如下:0级:日常生活能力和正常人一样;1级:一般劳动较正常人容易出现气促;2级:登楼、上坡时出现气促;3级:慢走100米以内即感气促;4级:讲话、穿衣等轻微动作便感到气短;5级:安静时就有气短,不能平卧。
3.肺功能低下造成的缺氧,易诱发多种慢性疾病:对心血管的影响"易加重高血压、诱发心肌梗死、脑血栓等一系列疾病;对神经系统的影响:缺氧会直接影响人的神经系统,甚至损伤脑组织;对组织和细胞的损伤:使整个组织细胞能量代谢出现障碍,免疫力下降,出现细胞变性。出现肾功能不全、糖尿病等慢性病。因此,提高肺功能,进行肺部的训练是非常必要的。
4.临床上,对于慢性阻塞性肺疾病、支气管扩张、慢性肺源性心脏等疾病和肺部手术后康复期,也需要进行针对性的肺部训练以提高呼吸能力,改善心肺功能。常用的训练方法有:一、膈肌呼吸,定义又称为复式呼吸,以强调膈肌运动为主的训练方法。以改善异常呼吸模式,有效减少呼吸辅助肌的使用,达到改善呼吸效率,降低呼吸能耗的目的,适用于脊髓损伤,慢支肺气肿或阻塞性肺疾病,严重的脊柱侧凸或后凸导致的呼吸功能障碍等;二、局部呼吸训练,定义又称为胸廓扩张,针对肺的某些区域可能出现的换气不足,肺部特定区域进行的扩张训练包括:侧方胸廓的扩张、后方基底部扩张、右中叶或舌叶扩张、肺尖扩张,适用于手术后及其他原因引起的肺不张或胸壁纤维化;三、阻抗呼气训练,在呼气时施加阻力的呼吸训练方法,以适当增加气道阻力,减轻或阻止病变部位小气道在呼气时过早闭合,从而达到改善通气和换气,减少肺内残气量的目的,适用于慢性阻塞性肺疾病(慢性支气管炎、肺气肿、哮喘和囊性纤维症)、脊髓损伤等。四、肺纤维化呼吸操,针对间质性肺病患者肺组织弹性下降、肺容积严重缩小、活动耐力的下降等症状,通过规范的肢体动作,配合深呼吸以达到改善肺通气和换气功能、延缓肺容积缩小的速度的目的。
5.现有技术中,例如公开号为cn111544851a的专利文件公开了一种医疗护理用训练器,该训练器设置配重砝码以调节呼气阻力;设置显示屏及语音播报器以直观地体现训练程度,设置有紫外灯及可拆卸装置便于消毒。公开号为cn114225341a的专利公开了一种呼吸内科临床用肺活量训练装置,该装置使用与吹入装置口连通的伸缩气囊驱动推动装置克服弹力做功,推动装置基于球阀改变移动柱抽吸空气的难度以调节呼气阻力。
6.公告号为cn111420362b的专利公开了一种医用肺活量训练设备及其工作方法,包括吹气机构、肺活量检测机构、增压机构和防倒吸装置,防倒吸装置包括支管、竖管、氧气罐、水平抵紧机构、开合机构、两个升降机构和连接机构,两个连接机构分别固定安装在支
管的两侧。该设备采用氧气罐对训练者进行供气,在呼气通道设置有防倒吸装置以避免呼出气体回流;该设备基于可改变进气口布置和内部压强大小的肺活量检测机构调节呼气难度。公告号为cn112057815b的专利公开了一种呼吸内科肺活量训练装置,该装置通过设置基于吹气抛球的第一训练装置和基于平衡杆的第二训练装置调节呼气阻力,也增加了训练的趣味性。
7.公告号为cn109938714b的专利公开了一种心肺康复训练可穿戴设备,训练强度调节弹性件能够对心脏康复训练的强度以及肺脏康复训练的呼吸气体流速进行调节,训练检测组件能够对心肺康复训练情况进行检测,控制器能够根据健康监测组件和训练检测组件的监测情况,自动对训练强度调节弹性件进行调节,以便在适合患者自身身体的状态下进行相应强度的训练,可使得患者在使用时根据自身情况自动调节所需训练强度。
8.综上所述,现有技术不适用于肺部训练需要辅以手部或身体动作的情形;针对呼气部分需要患者手动辅助以限定在口鼻位置的问题,没有提供一种便于佩戴且呼气通道与患者口鼻连接紧密的装置;现有技术针对呼气阻力的调整为弹簧、重力或电子设备等不连续、简单线性的调整模式,呼气阻力在训练过程中无法连续变化或跟随呼气强度进行变化,不适用于精细化的呼吸训练控制。
9.此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于发明人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
技术实现要素:
10.针对现有技术所提出的至少一部分不足之处,本技术提供了一种医疗护理用呼吸训练器,训练器包括彼此分离地设置有呼气通道和吸气通道的呼吸模块,其中,呼气通道和吸气通道能够择一地开通或截止;用于将新鲜空气单向导入患者口鼻的呼吸模块按照该患者的呼出气体可以被单向导入训练模块的方式与训练模块连接,其中,在患者经由呼气通道进行呼吸训练的情况下,控制模块按照训练模块向呼出气体反馈可调阻力的方式执行呼吸训练计划。
11.针对现有技术不适用于需要辅以手部或身体动作的呼吸训练情景,本技术通过限定于患者头部的呼吸模块克服了需要手部辅助限定呼气装置的缺陷,在呼吸模块与患者口鼻建立稳固连接的同时,也使得患者身体可以辅以动作以进行综合训练,对不同肺部疾病的康复训练均能有良好的适用性。呼吸模块的吸气通道和呼气通道分离设置,使得佩戴呼吸模块的患者可以间隔呼吸,持续训练,避免了从口鼻取下或覆上呼吸模块导致的训练不连续或贴合不严密;呼气通道和吸气通道择一单向开通或截止的设计使得吸气过程和呼气过程交替进行,不会相互影响,且呼出气体基于单向流通作用不会重新回到口鼻附近,避免重复吸入呼出气体产生健康风险。
12.同时,呼气、吸气交替进行的过程可以与训练模块的单次训练或连续训练过程相配合,使得吸气通道和呼气通道分离设置的呼吸模块与向呼出气体反馈可调阻力的训练模块基于控制模块实现呼吸训练的精细化控制。例如,训练模块设置有若干传感器以分别检测呼出气体压力、呼吸反馈阻力和呼出气体量等参数,控制模块实时追踪呼出气体压力以
控制训练模块调整呼吸反馈阻力,依据呼吸反馈阻力随呼出气体压力变化规律的不同,设置多种可针对不同呼吸系统薄弱环节的呼吸训练计划,适用于术后呼吸功能康复训练或针对呼吸系统的功能性训练。
13.优选地,呼吸模块还设有呼吸罩,呼吸罩并行地连通至吸气通道和呼气通道,呼气通道和吸气通道能够择一地开通或截止是通过呼吸罩内部设置的调节机构来实现的,其中,调节机构是通过检测所述患者的呼吸压来执行择一开通或截止的操作的。例如,当患者处于吸气状态时,调节机构的压力检测装置在呼吸罩内检测到呼吸负压,调节机构控制吸气通道的阀门开启而保持呼气通道的阀门关闭;当患者处于呼气状态时,调节机构在呼吸罩内检测到呼吸正压,调节机构控制吸气通道的阀门关闭而保持呼气通道的阀门开启。调节机构基于呼吸压的变化控制吸气通道和呼吸通道择一开通或关闭的方式可与训练模块的连续训练过程相配合,相比现有技术中呼吸模块需要手部辅助固定或呼吸通道共用的方案,连续佩戴式的呼吸罩提高了呼吸训练过程的连贯性和稳定性,调节机构控制呼气通道和吸气通道择一地开通或截止则将呼气过程和吸气过程有机分离,可针对吸气过程或呼气过程设置单独训练模式,对呼吸系统的精细化呼吸训练具备重要意义。
14.优选地,训练器配置有若干与控制模块数据连接的传感器,其中第一传感器设置于训练模块以检测呼出气体压力,并由控制模块确定为第一压力,用以表征当前呼出气体的实际压力;第二传感器设置于训练模块以检测呼气反馈阻力,并由控制模块确定为第二压力,用以表征训练模块向呼出气体反馈的实际呼气阻力;第三传感器设置于训练模块以检测单次呼出气体量,并由控制模块通过第一压力和第二压力计算为标准状态下的单次呼气量;第四传感器设置于患者胸腔表面以检测胸围尺寸波动,并由控制模块计算呼吸周期。
15.优选地,控制模块按照追踪第一压力的方式来配置稳压训练模式,以便将第二压力保持稳定,其中,在第一压力小于第二压力时,不改变第二压力;在第一压力大于第二压力时,通过调整呼吸模块的呼气通道和/或训练模块以保持第一压力等于第二压力,训练模块基于保持稳定的第二压力向呼出气体反馈稳定的呼气阻力。
16.针对需要训练呼吸肌群和神经系统的患者(例如颈髓损伤、进行性肌萎缩症、格林巴利综合征引起的呼吸肌无力)而言,运动疗法虽然很有效,但因这些患者肌肉力量或神经传导效果的进步或退步是很难准确衡量的,康复运动中的呼气运动更需要专注于其呼气压力达到的程度以及达到目标呼气压力所需的时间。通过稳压训练模式能够直观地设定训练目标,特别是循序渐进地设定训练目标压力值,这种反复多次压力恒定的训练对于升级系统受损的患者建立神经旁路形成新的肌肉记忆是极为重要的;而差值分明的阶梯式压力上升与下降对于新的肌肉记忆形成有着关键性意义。第二压力保持稳定意味着呼气所需达到的最低压力是明确预设的,而在第一压力小于第二压力时,第二压力保持恒定以便于给肌肉一个明确的反馈信号,形成特定压力的呼吸阈值,通过反复多次练习能够让患者明确自主呼吸的最浅幅度,对于独立自主生活有着至关重要的意义。而根据本发明,仅在第一压力大于第二压力时,才通过调整呼吸模块的呼气通道和/或训练模块以将第一压力保持等于第二压力;这是明显有别于现有技术的弹簧或液压训练机构的。因为持续恒定压力对于维持中段呼吸肌肉的耐力是非常有意义的,特别是形成相关肌肉记忆需要一定的时间才能达成。现有技术的弹簧、液压或弹簧液压组合,都只能提供越来越大的阻力,对于呼吸肌肉群的后半程耐力训练而言毫无帮助。
17.优选地,控制模块按照第一压力与第二压力的差值保持恒定的方式设置有跟随训练模式,当第一压力在呼气阶段先增后减地变化时,第二压力通过与第一压力保持恒定差值的方式跟随第一压力先增后减地变化,使得训练模块反馈的呼气阻力跟随呼气强度进行变化。
18.针对呼吸肌无力的患者,往往难以持续地高质量呼气,而且在缺乏明确的训练引导时,患者本人无法判断呼吸肌和神经系统的能力,特别是在进行性肌萎缩症的情况下,倘若不能监控呼吸过程中全过程的压力波动情况,就不能准确地判断肌肉萎缩症所引发的呼吸肌肉耐力恶化,也无法判断呼吸肌和神经系统的呼吸肌肉耐力训练效果。根据本发明,通过确定表征当前呼出气体的实际压力的第一压力与可调阻力值的第二压力之间的差额,特别是设定彼此差距明显的差额,用以衡量呼吸肌肉的耐力训练效果。第一压力与第二压力之差值是可以单独选择设定的,设定差值并由控制单元应用于训练模块之后,将其设定为恒定值;此时,可以通过监测第四传感器的数值来确定当前差值与胸围尺寸波动的时间关系,并借以推导出呼吸肌肉耐力的变化情况。
19.优选地,控制模块按照第二压力在至少两个设定值之间以预设时间间隔跳变的方式设置有波动训练模式,训练模块基于波动变化的第二压力向呼出气体反馈振荡变化的呼气阻力。
20.患者进行呼吸训练时,不仅要训练呼吸肌群,也还需要改善肺底部通气能力。肺底部通气能力训练主要是膈肌与腹肌的训练,例如可以借助于腹式呼吸。根据本发明,通过在腹式呼吸和胸式呼吸之间切换,间隙性训练不同部位的肌肉,强迫呼吸肌群、膈肌和腹肌三者形成新的肌肉记忆,能够在更短时间内协助患者恢复呼吸能力。预设时间间隔可由护理人员根据经验在训练器上进行设定,也可以凭借训练效果由机器学习来确定;轮替式呼吸也使得横膈膜和肋间肌得到更高强度的锻炼。此外,之所以需要“按照预设时间间隔跳变”设定第二压力,这是因为患者的腹式呼吸与胸式呼吸之间存在很大的差异,需要针对性设定。而对于需要练习胸腹式呼吸的人群而言,其需要根据不同情况下所需的气息控制来设定预设时间间隔的长度,且由此可以通过监测第四传感器的数值来确定表演训练者的多个跳变第二压力与胸围尺寸波动的时间关系,借以实现气息控制的检测和反馈。
21.优选地,控制模块按照预设次数稳压训练模式、跟随训练模式和波动训练模式中的至少两种以预设时间间隔和/或预设次序组合的方式设置有频率训练模式,预设次数、预设时间间隔和/或预设次序组合能够依据呼吸训练强度进行调整。
22.在呼吸训练过程中,无其它因素干扰情况下,不同康复阶段下患者呼吸能力和心肺功能处于差异化提升或稳步提升的过程;同时,呼吸系统受到神经系统、呼吸肌群、呼吸器官、心肺交换等多方面因素的影响。为将呼吸训练的综合性和针对性相统一,需将前述稳压训练模式、跟随训练模式和波动训练模式进行结合,可作为单一训练模式的预备阶段或进阶阶段,整合各模式的优点,可实现对呼吸系统全面而综合的训练。训练稳压训练模式中,反复多次压力恒定和差值分明的阶梯式压力对于膈肌、胸肌等呼吸肌的耐力训练和肌肉记忆构建具备重要意义;跟随训练模式中,第一压力和第二压力的差值保持恒定,呼气阻力随呼吸强度的增大而增大,对于单次呼吸训练不同阶段提供针对性的呼气阻力,适用于呼吸肌群术后功能重建或呼吸系统障碍等情形,也可为呼吸肌耐力变化及发展判断提供参考;波动训练模式中,患者通过在腹式呼吸和胸式呼吸之间来回切换,波动的呼气阻力和交
替的训练节奏充分发展呼吸肌耐力和肺底部通气能力。
23.例如,将稳压训练模式和波动训练模式结合,可满足强调膈肌等呼吸肌动作的训练需求,改善呼吸肌群异常,强化主要呼吸肌的耐力,降低呼吸能耗,适用于脊髓损伤、阻塞性肺疾病,同时,腹式呼吸与胸式呼吸切换进行也能针对肺部特定区域进行扩张训练,适用于肺部换气不足、肺不张或胸壁纤维化等疾病;再比如,将稳压训练模式和跟随训练模式结合,稳定呼吸阻力可减轻或阻止病变气道过早闭合,改善通气能力,跟随式呼吸阻力可降低训练强度,缓解训练疲劳,也可强化呼吸肌在阻力变化阶段的呼吸耐力和功能稳定性,适用于限制性障碍或阻塞性障碍引起的呼吸疾病。
24.优选地,稳压训练模式、跟随训练模式和波动训练模式是由控制模块依据第三传感器和/或第四传感器获得的单次呼气量和/或呼吸周期来选择性设定的。控制模块基于第三传感器和第四传感器获取患者单次呼吸气体量和呼吸周期,单次呼吸气体量随时间的变化体现患者呼气训练过程的稳定程度,呼吸周期则体现患者呼吸训练频率及速度,控制模块可依据单次呼气量和呼吸周期随时间的变化规律来对呼吸训练模式进行自动调整,也可以由患者或医护人员结合训练数据和训练体验进行手动调整。例如,当单次呼吸气体量在若干周期呈下降趋势时,控制模块基于预设训练计划下调当前训练模式的呼吸难度或切换训练模式。
25.优选地,控制模块可将第一传感器至第四传感器所获取的数据进行加工并以画面或声音的方式进行展示,其中,控制模块基于训练模式的预设参数和呼吸周期向患者展示参考曲线,第一压力和第二压力基于呼吸周期设置为连续变动的实时曲线,使得患者能够通过参考曲线与实时曲线进行对比以获得训练引导。控制模块基于画面或声音的展示方式能够对呼吸训练者产生有益反馈,相比于单纯枯燥的呼吸训练,本技术可将多种训练模式与展示模式关联起来,展示数据基于传感器实时获得,患者或训练者能够基于实时的展示获得直接反馈,便于训练者进行无延迟的呼吸调整,可以避免现有装置中脱离实时数据的展示与当前呼吸训练调整的不匹配或时机滞后的缺陷。
26.优选地,若干呼吸周期内实时曲线的积分面积相对参考曲线的积分面积的比值和/或单次呼气量基于呼吸周期的变化数据可作为呼吸训练质量评价指标。实时曲线的积分面积指实时曲线与时间横轴包围所形成区域的面积,可以用于表征单个或多个呼吸周期内的平均呼气强度,参考曲线的积分面积则表示单个或多个呼吸周期内平均呼气强度的设定呼吸强度目标,则比值可以表示实际呼吸训练相对于设定目标的完成度。单次呼气量基于呼吸周期的变化数据则可以直观地获得患者呼吸能力随时间的变化过程,可以为训练质量及训练模式的设置提供数据参考。
27.优选地,调节机构也可以是呼气通道和吸气通道中设置的单向节,使得呼气和吸气均需要在单向节两端形成一定压差才能够实现气体流动,对于吸气过程和呼气过程起到基础锻炼的作用;同时,配合呼吸模块的设置方式,训练模块用可自由活动的活塞将内腔分隔为训练腔和调节腔,其中训练腔容纳呼出气体,调节腔用以控制活塞压缩调节腔受到的阻力,由于活塞的密闭分隔作用,训练腔和调节腔存在压差,压差产生的压力克服活塞受到的摩擦力并推动活塞在内腔内部移动,则通过控制模块改变调节腔内的压力可以对活塞受到的运动阻力进行精细化控制,例如连续压力变化控制或非线性控制,可以配合多种呼吸训练模式的进行。
28.优选地,本技术提供的一种医疗护理用呼吸训练器也可以是一种医疗护理用肺活量训练器。训练器包括呼气通道和吸气通道分离设置的呼吸模块,在呼吸模块通过限定组件与患者头部形状配合的方式与患者口鼻建立连接的情况下,呼吸模块的呼吸罩基于贴合患者口鼻附近面部形状覆盖患者口鼻,使得呼气通道和吸气通道能够作为患者呼吸空气的流动通道。
29.优选地,在呼吸罩配置若干连接口的情况下,用于连接患者口鼻的呼吸罩的边缘设置有形状记忆条,使得形状记忆条能够基于外力作用形成贴合患者面部曲线的形状;呼吸罩靠近患者面部一侧的边缘设置有舒适层,用于封闭呼吸罩边缘与患者面部之间孔隙的舒适层能够基于自身弹性缓解形状记忆条对患者面部的挤压作用力。
30.优选地,在呼吸罩的连接口分别与呼气通道和吸气通道连接的情况下,限定组件通过分别设置在呼吸罩的左右侧的若干弹性带绕过患者头部进行连接的方式将呼吸罩限定在患者面部的口鼻位置;弹性带可以对称设置在呼吸罩左右两侧,使得弹性带对呼吸罩的作用力在保持呼吸紧贴患者面部的同时,也能让呼吸罩相对患者面部中轴线保持对称。呼吸罩基于限定组件、形状记忆条和舒适层的共同作用与患者面部建立稳固连接,可以适用于患者呼吸训练需要身体动作配合的场景,解放双手,可长时间佩戴,相较于现有技术中依靠手部辅助限定呼吸装置的技术方案有更广泛的适用性。
31.优选地,在呼吸罩的第一开口与呼气通道连接的情况下,用于流通患者呼出气体的呼气通道按照能够向训练模块单向输出气体的方式设置有第一单向节;第一单向节包括与呼气通道连接并配置有开孔的固定环,固定环远离患者面部一侧设置有挡板,用于与固定环配合形成阻挡呼气通道的挡板通过若干弹性件与固定环连接;其中,在挡板能够基于弹性件连接固定环并相对固定环移动的情况下,呼出气体在呼气通道内向远离患者面部的方向移动,呼出气体可推动挡板向远离患者面部的方向移动,使得基于预压缩的弹性件而与固定环贴合的挡板脱离固定环并形成可供呼出气体流动的通道。
32.优选地,在呼吸罩的若干第二开口与若干设置在呼吸罩两侧的吸气通道连接的情况下,用于流通患者吸入气体的吸气通道按照能够向呼吸罩单向输入气体的方式设置有若干第二单向节,在设置于吸气通道内表面的固定环配置为中间开孔形状的情况下,挡板按照能够仅允许吸入气体朝向靠近患者面部的方向流动的方式与固定环靠近患者面部一侧通过被预压缩的弹性件进行连接,使得挡板基于压差向靠近患者面部的方向移动并形成吸入气体流动的通道。
33.优选地,两组吸气通道分别与设置在呼吸罩两侧的第二开口连接,使得患者能够同时呼吸两侧的新鲜空气,保持足够的氧气供应,提高呼吸训练的可持续性;第一开口的截面积小于第二开口的截面积,使得呼出气体在呼气通道内的压力能够保持在较高水平,保证对训练模块供气的连续性。
34.优选地,呼吸模块通过长度可调整的连接部与训练模块可拆卸地连接,连接部配置为可拉伸或压缩的波纹管,连接部靠近呼吸罩一端与呼气通道的呼气口可拆卸地连接,连接部靠近训练模块一端与进气口可拆卸地连接,使得呼吸模块和训练模块组装或拆卸方便快捷,便于清洗消毒。
35.优选地,训练模块包括配置有空腔的壳体,外壳靠近患者一侧设置有显示屏,用于显示训练信息的显示屏可基于按键进行人机交互,显示屏周围设置有声光模拟组件。
36.优选地,用于提供可调整呼气阻力的训练模块配置有带活塞的空腔,布置在空腔内部的活塞将空腔分隔为容纳呼出气体的训练腔和压力可调整的调节腔,使得控制模块按照能够改变调节腔内气体压力的方式想训练腔内的呼出气体反馈可调整的呼气阻力。
37.优选地,在患者呼出气体能够经过连接部流动至进气口的情况下,设置在训练腔与进气口之间的管道中间设置有单向阀,使得呼出气体仅能单向流通至训练腔内,避免进气口或连接部气密性问题影响训练腔内的气体压力。训练腔设置有用于对训练腔快速放气的第一控制阀,调节腔设置有用于控制调节腔内气体压力的第二控制阀和第三控制阀,调节腔可分别通过第二控制阀和第三控制阀控制进入调节腔内的气体量和排出调节腔的气体量,使得调节腔内的气体压力可以进行精细化控制。
38.优选地,在训练腔的气体压力可基于进气口和第一控制阀发生改变的情况下,在训练腔内设置有实时检测训练腔的气体压力的第一传感器;在调节腔的气体压力可基于第二控制阀和第三控制阀发生改变的情况下,调节腔内设置有用于实时检测气体压力的第二传感器;在活塞能够在空腔内进行移动的情况下,空腔的侧壁设置有用于检测活塞在空腔内行程的第三传感器。
39.优选地,控制模块包括布置于患者胸腔表面的环带,用于将至少一个第四传感器限定在患者胸腔表面的环带可基于调节部与不同体型的患者建立稳固连接,第四传感器按照能够测量患者胸部呼吸动作产生的周期性变化数据的方式布置在环带靠近患者皮肤表面的一侧。
40.优选地,控制模块按照能够获取训练腔内气体第一压力的方式与第一传感器电连接,控制模块按照能够控制第一控制阀开度的方式与第一控制阀电连接;控制模块按照能够获取调节腔内气体第二压力的方式与第二传感器电连接,控制模块按照能够控制进入或排出调节腔气体量的方式与第二调节阀和第三调节阀电连接;控制模块按照能够获取活塞在空腔内运动位置数据的方式与第三传感器电连接;控制模块按照能够获取患者胸腔呼吸产生的周期性数据的方式与第四传感器电连接。
41.优选地,控制模块包括用于对获取数据进行分析并输出控制命令的计算单元,存储单元按照能够储存数据和控制命令的方式与计算单元电连接,存储单元或计算单元的数据可通过通信单元传递至监护设备,监护设备可以是云端服务器或智能终端。
42.优选地,控制模块通过计算单元分析第一传感器至第四传感器所获取的数据并输出控制命令的方式设置有多种训练模式,使得训练模块的调节腔基于不同训练模式向活塞反馈可动态调整的呼气阻力。
43.临床实践中,心肺及呼吸功能退化受多种因素影响,例如肺部疾病、呼吸肌群损伤、术后或年龄因素等,而现有技术中呼吸阻力较为单一的配置模式无法满足患者在呼吸训练过程中需要对阻力进行精细化控制的需求,且保持训练模式的连贯性和频率性在呼吸训练中十分重要。因此,本技术在设置的呼吸模块可进行连续呼吸训练的基础上,控制模块基于传感器和控制阀对调节腔内的气体压力进行实时控制,配合训练腔内呼出气体的压力变化形成多种呼吸训练模式;例如,第二压力保持在设定值,呼气阻力稳定,适用于各种难度的匀速呼吸训练;第二压力跟随第一压力变化,连续跟随变化的阻力反馈可提高非匀速训练的效果;第二压力在设定范围波动变化,连续波动变化的阻力可以在一重一缓的模式下锻炼呼吸肌肉韧性和呼吸协调性。同时,将多种呼吸训练模式以一定频率和次数组合起
来,可以结合各方式的优点以形成综合训练,患者可以基于控制模块对训练参数进行自定义,提高患者的参与度,避免单一模式下的重复和枯燥。
44.优选地,单次训练的初始状态下,第一压力和第二压力保持与外界大气压一致,活塞位于靠近进气口的位置,第一控制阀至第三控制阀关闭;单次训练过程中,训练腔膨胀,第一压力大于第二压力,克服活塞运动阻力,压缩调节腔,第二压力基于控制模块保持与第一压力的差值恒定;单次训练的末状态下,第一压力降低至与第二压力一致,活塞位于远离进气口的位置;复位过程,先打开第一控制阀,第一压力与大气压一致,关闭第三控制阀,打开第二控制阀向调节腔充气,第二压力大于第一压力,推动活塞复位,关闭第二控制阀,打开第三控制阀,第二压力与大气压一致。
45.优选地,控制模块按照第二压力保持稳定的方式设置有稳压训练模式,在呼出气体持续进入训练腔并推动活塞压缩调节腔的情况下,调节腔对活塞的阻力稳定不变。
46.现有技术基于弹性元件控制呼气阻力的技术方案,呼气阻力往往随呼气进程的推进而增大,与呼吸训练中阻力应当保持稳定或逐渐减小的需求不符,增加了呼吸训练者的负担和压力,不利于训练的稳步推进,也不适用于心肺功能本就处于异常状态的患者。本技术通过控制调节腔内压力保持不变,使得活塞受到调节腔的气体压力保持不变,患者在阻力稳定的情况下进行训练,可根据自身情况设定阻力,能够快速适应,可逐步提高呼气阻力以进行不同难度的呼吸训练。
47.优选地,控制模块可将稳定值设定为大气压预设倍数的稳压训练模式作为检验训练效果的测量模式,该测量模式下,活塞运动的最大行程可以作为评判或考核患者肺活量的依据。
48.优选地,在控制模块处于稳压训练模式的情况下,进气口进气,计算单元获取第一压力和第二压力,当第一压力增大并推动活塞移动时,控制模块控制第三控制阀部分开启,调节腔排气,使得被压缩的调节腔的第二压力保持在一个稳定值,活塞向远离进气口的方向移动。
49.优选地,控制模块按照第一压力与第二压力的差值保持恒定的方式设置有跟随训练模式,使得调节腔对活塞反馈的呼气阻力跟随呼气强度进行变化。使得训练难度可以根据呼吸阶段的不同进行适应性变化,提高了呼吸训练的灵活性。
50.跟随训练模式保证呼气阻力随呼气强度的变化而变化,即在非匀速呼气过程中,初始呼气量较大,训练腔内第一压力快速增长,则控制模块控制调节腔内第二压力以相对第一压力保持一定差值的方式进行增长,在呼吸中后期,呼气量减小,训练腔内第一压力降低,则调节腔内第二压力也跟随降低;该模式适用于对呼吸阻力动态变化有需求的患者,也可用于训练膈肌或其它呼吸肌的爆发力;呼气阻力跟随呼气强度进行变化,使得大呼气量向小呼气量转变过程的阻力反馈更加灵活,避免压力突变下造成的憋气感或阻力消失感,提升呼吸训练的舒适度。
51.优选地,在控制模块处于跟随训练模式的情况下,进气口进气,计算单元获取第一压力和第二压力,当第一压力超出第二压力的值达到第一阈值时,控制模块控制第二控制阀和第三控制阀保持部分开启,调节腔可排气或充气,使得第一压力超出第二压力的值与第一阈值保持相同,活塞向远离进气口的方向移动,第一阈值可以根据训练难度调整,例如第一阈值越大,训练腔内第一压力就越大,需要更多气体使训练腔升压,训练难度就越大。
52.优选地,控制模块按照第二压力在至少两个设定值之间以设定频率变化的方式设置有波动训练模式,调节腔基于波动变化的第二压力向活塞反馈振荡变化的呼气阻力。
53.波动训练模式中,第二压力可设置第二阈值和更大的第三阈值,患者在连续呼气阶段,调节腔的第二压力在第二阈值和第三阈值之间以设定频率来回变化,调节腔反馈给活塞的阻力呈现出一种波动变化的形式,在一个设定范围内波动变化的第二压力可以向呼吸过程传递振荡式的阻力,呼气训练的呼气阻力围绕平均阻力呈现出微过载和微失载的连续变化模式,使得呼气系统在一重一缓的模式中锻炼呼气肌群和肺部的韧性及耐力。
54.优选地,控制模块按照预设次数的稳压训练模式、跟随训练模式和波动训练模式中的至少两种以预设频率进行组合的方式设置有频率训练模式,预设次数和预设频率可以依据呼吸训练强度在显示屏上进行调整。
55.稳压训练模式呼气阻力稳定,阻力调整简单快捷,患者适应较快;跟随训练模式,呼气阻力随呼气强度的变化而变化,在保证呼气顺畅的同时实现呼吸锻炼;波动训练模式提供波动变化的阻力,可以有针对性地设置阻力以锻炼呼吸肌肉,提高呼吸耐力;频率训练模式综合了多种训练模式的优点,多种训练模式以预设次数和预设频率进行组合,可提高呼吸训练的层次和变化,对于不同呼吸疾病的恢复训练均有良好的适用性。
56.优选地,显示屏可基于设置在显示屏上的按键选择训练模式并对不同训练模式中的训练参数进行控制,声光模拟组件可基于不同的训练模式或训练参数输出动态变化的声音或光影。
57.优选地,显示屏布置有用于展示活塞行程周期动态曲线和环带包围尺寸周期动态曲线的动态展示区,其中,控制模块可基于计算单元对活塞行程数据和环带包围尺寸数据做周期性分析,计算单元分析活塞行程数据和环带包围尺寸数据的时间变化曲线,并向显示屏输出包含活塞行程数据的周期动态曲线和包含环带包围尺寸数据的周期动态曲线。周期动态曲线在向直接展示呼吸数据的同时,也可以为患者控制训练节奏提供参考。
58.优选地,显示屏包括用于输出训练完成度和评价数据的参考显示区,控制模块可基于计算单元对存储单元的历史数据分析得出患者训练完成度和评价数据,并输出至显示屏的参考显示区。
附图说明
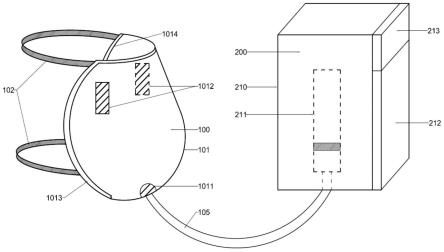
59.图1是本发明的一种优选实施方式的简化整体结构示意图;
60.图2是本发明的一种优选实施方式呼气通道和吸气通道的简化结构示意图;
61.图3是本发明的一种优选实施方式训练模块的简化结构示意图;
62.图4是本发明的一种优选实施方式控制模块连接示意图。
63.附图标记列表
64.100:呼吸模块;101:呼吸罩;1011:第一开口;1012:第二开口;1013:形状记忆条;1014:舒适层;102:限定组件;103:呼气通道;1031:呼气口;1032:第一单向节;1033:固定环;1034:弹性件;1035:挡板;104:吸气通道;1041:吸气口;1042:第二单向节;1043:过滤层;105:连接部;200:训练模块:201:进气口;202:单向阀;203:训练腔;204:调节腔;205:活塞;206:第一控制阀;207:充气装置;208:第二控制阀;209:第三控制阀;210:壳体;211:空腔;212:显示屏;213:声光模拟组件;300:控制模块;302:第一传感器;303:第二传感器;
304:第三传感器;305:第四传感器;306:存储单元;307:计算单元;308:通信单元;309:监护设备。
具体实施方式
65.下面结合附图对本发明进行详细说明。
66.本技术提供了一种医疗护理用呼吸训练器,如图1和图2所示,包括呼气通道103和吸气通道104分离设置的呼吸模块100,在呼吸模块100通过限定组件102与患者头部形状配合的方式与患者口鼻建立连接的情况下,呼吸模块100的呼吸罩101基于贴合患者口鼻附近面部形状覆盖患者口鼻,使得呼气通道103和吸气通道104能够作为患者呼吸空气的流动通道。
67.优选地,如图1所示,在呼吸罩101配置若干连接口的情况下,用于连接患者口鼻的呼吸罩101的边缘设置有形状记忆条1013,使得形状记忆条1013能够基于外力作用形成贴合患者面部曲线的形状;呼吸罩101靠近患者面部一侧的边缘设置有舒适层1014,用于封闭呼吸罩101边缘与患者面部之间孔隙的舒适层1014能够基于自身弹性缓解形状记忆条1013对患者面部的挤压作用力。
68.优选地,如图1所示,在呼吸罩101的连接口分别与呼气通道103和吸气通道104连接的情况下,限定组件102通过分别设置在呼吸罩101的左右侧的若干弹性带绕过患者头部进行连接的方式将呼吸罩101限定在患者面部的口鼻位置;弹性带可以对称设置在呼吸罩101左右两侧,使得弹性带对呼吸罩101的作用力在保持呼吸紧贴患者面部的同时,也能让呼吸罩101相对患者面部中轴线保持对称。呼吸罩101基于限定组件102、形状记忆条1013和舒适层1014的共同作用与患者面部建立稳固连接,可以适用于患者呼吸训练需要身体动作配合的场景,解放双手,可长时间佩戴,相较于现有技术中依靠手部辅助限定呼吸装置的技术方案有更广泛的适用性。
69.优选地,如图2所示,在呼吸罩101的第一开口1011与呼气通道103连接的情况下,用于流通患者呼出气体的呼气通道103按照能够向训练模块200单向输出气体的方式设置有第一单向节1032;第一单向节1032包括与呼气通道103连接并配置有开孔的固定环1033,固定环1033远离患者面部一侧设置有挡板1035,用于与固定环1033配合形成阻挡呼气通道103的挡板1035通过若干弹性件1034与固定环1033连接;其中,在挡板1035能够基于弹性件1034连接固定环1033并相对固定环1033移动的情况下,呼出气体在呼气通道103内向远离患者面部的方向移动,呼出气体可推动挡板1035向远离患者面部的方向移动,使得基于预压缩的弹性件1034而与固定环1033贴合的挡板1035脱离固定环1033并形成可供呼出气体流动的通道。
70.优选地,如图2所示,在呼吸罩101的若干第二开口1012与若干设置在呼吸罩101两侧的吸气通道104连接的情况下,用于流通患者吸入气体的吸气通道104按照能够向呼吸罩101单向输入气体的方式设置有若干第二单向节1042,在设置于吸气通道104内表面的固定环1033配置为中间开孔形状的情况下,挡板1035按照能够仅允许吸入气体朝向靠近患者面部的方向流动的方式与固定环1033靠近患者面部一侧通过被预压缩的弹性件1034进行连接,使得挡板1035基于压差向靠近患者面部的方向移动并形成吸入气体流动的通道。
71.优选地,弹性件1034的预压缩弹力较小,挡板1035两侧较小的压差即可推动挡板
1035相对固定环1033进行移动,例如,挡板1035两侧的压差为1-3kpa时,即可推动挡板1035相对固定环1033移动。
72.优选地,如图1所示,两组吸气通道104分别与设置在呼吸罩101两侧的第二开口1012连接,使得吸气口1041能够同时吸入两侧的新鲜空气,保持足够的氧气供应,提高呼吸训练的可持续性,且吸气通道104内靠近吸气口1041位置设置有过滤层1043,可以吸附吸入空气中的灰尘及杂质,提高呼吸质量。
73.优选地,第一开口1011的截面积小于第二开口1012的截面积,使得呼出气体在呼气通道103内的压力能够保持在较高水平,保证对训练模块200供气的连续性。
74.呼吸模块100通过长度可调整的连接部105与训练模块200可拆卸地连接,连接部105配置为可拉伸或压缩的波纹管,连接部105靠近呼吸罩101一端与呼气通道103的呼气通道103可拆卸地连接,连接部105靠近训练模块200一端与进气口201可拆卸地连接,使得呼吸模块100和训练模块200组装或拆卸方便快捷,便于清洗消毒。
75.如图1所示,训练模块200包括配置有空腔211的壳体210,外壳靠近患者一侧设置有显示屏212,用于显示训练信息的显示屏212可基于按键进行人机交互,显示屏212周围设置有声光模拟组件213。
76.如图3所示,在空腔211被活塞205分隔为训练腔203和调节腔204的情况下,用于容纳患者呼出气体的训练腔203可基于呼出气体的增加而推动活塞205朝调节腔204运动,使得调节腔204基于调节腔204内气体压力的改变调整对活塞205的反作用力。
77.在患者呼出气体能够经过连接部105流动至进气口201的情况下,设置在训练腔203与进气口201之间的管道中间设置有单向阀202,使得呼出气体仅能单向流通至训练腔203内,避免进气口201或连接部105气密性问题影响训练腔203内的气体压力。
78.如图3所示,训练腔203设置有用于对训练腔203快速放气的第一控制阀206,调节腔204设置有用于控制调节腔204内气体压力的第二控制阀208和第三控制阀209,调节腔204可分别通过第二控制阀208和第三控制阀209控制进入调节腔204内的气体量和排出调节腔204的气体量,使得调节腔204内的气体压力可以进行精细化控制。
79.在训练腔203的气体压力可基于进气口201和第一控制阀206发生改变的情况下,在训练腔203内不影响活塞205运动的位置设置有第一传感器302,使得第一传感器302能够实时检测训练腔203的气体压力;在调节腔204的气体压力可基于第二控制阀208和第三控制阀209发生改变的情况下,调节腔204内设置有用于实时检测气体压力的第二传感器303;在活塞205能够在空腔211内进行移动的情况下,空腔211的侧壁设置有用于检测活塞205在空腔211内行程的第三传感器304。
80.控制模块300包括布置于患者胸腔表面的环带,用于将至少一个第四传感器305限定在患者胸腔表面的环带可基于调节部与不同体型的患者建立稳固连接,第四传感器305按照能够测量患者呼吸运动产生的周期性变化数据的方式布置在环带靠近患者皮肤表面的一侧。
81.如图4所示,控制模块300按照能够获取训练腔203内气体第一压力的方式与第一传感器302电连接,控制模块300按照能够控制第一控制阀206开度的方式与第一控制阀206电连接;控制模块300按照能够获取调节腔204内气体第二压力的方式与第二传感器303电连接,控制模块300按照能够控制进入或排出调节腔204气体量的方式与第二调节阀和第三
调节阀电连接;控制模块300按照能够获取活塞205在空腔211内运动位置数据的方式与第三传感器304电连接;控制模块300按照能够获取患者胸腔呼吸产生的周期性数据的方式与第四传感器305电连接。
82.控制模块300包括用于对获取数据进行分析并输出控制命令的计算单元307,存储单元306按照能够储存数据和控制命令的方式与计算单元307电连接,存储单元306或计算单元307的数据可通过通信单元308传递至监护设备309,监护设备309可以是云端服务器或智能终端。
83.在患者向训练腔203导入呼出气体的情况下,控制模块300通过计算单元307分析第一传感器302至第四传感器305所获取的数据并输出控制命令的方式设置有多种训练模式,使得训练模块200的调节腔204基于不同训练模式向活塞205反馈不同的呼气阻力。
84.如图3所示,具体的,由进气口201导入训练腔203的气体量为dv1,由第二控制阀208导入调节腔204的气体量为dv2,由第三控制阀209导出调节腔204的气体量为dv3,训练腔203内第一传感器302测量的第一压力为p1,调节腔204内第二传感器303测量的第二压力为p2,第三传感器304检测的活塞205行程为h,第四传感器305检测的周期性变化数据为l。
85.单次训练的初始状态下,第一压力p1和第二压力p2保持与外界大气压p0一致,活塞205位于靠近进气口201的位置,第一控制阀206至第三控制阀209关闭;单次训练过程中,训练腔203膨胀,第一压力p1大于第二压力p2,克服活塞205运动阻力,压缩调节腔204,第二压力p2基于控制模块300保持与第一压力p1的差值恒定;单次训练的末状态下,第一压力p1降低至与第二压力p2一致,活塞205位于远离进气口201的位置;复位过程,先打开第一控制阀206,第一压力p1与大气压p0一致,关闭第三控制阀209,打开第二控制阀208向调节腔204充气,第二压力p2大于第一压力p1,推动活塞205复位,关闭第二控制阀208,打开第三控制阀209,第二压力p2与大气压p0一致。
86.优选地,控制模块300按照第二压力p2保持稳定的方式设置有稳压训练模式。训练过程中,调节腔204内压力p2保持不变,使得活塞205受到调节腔204的气体压力保持不变,适用于不同难度的阻抗呼吸训练。
87.在控制模块300处于稳压训练模式的情况下,进气口201的进气量为dv1,计算单元307获取p1和p2,当p1增大时并推动活塞205移动时,控制模块300控制第三控制阀209部分开启,调节腔204的排气量为dv3,使得被压缩的调节腔204的p2保持在一个稳定值,活塞205向远离进气口201的方向移动。稳定值可以根据训练难度进行调节,例如稳定值范围可设定为1.0-5.0倍大气压p0。
88.优选地,控制模块300按照可以将稳定值为1.1倍p0的稳压训练模式作为检验训练效果的测量模式,该测量模式下,活塞205运动的最大行程可以作为评判患者呼吸能力的依据。
89.优选地,控制模块300按照第一压力p1与第二压力p2的差值保持恒定的方式设置有跟随训练模式。训练过程中,调节腔204内的第二压力p2跟随训练腔203内第一压力p1变化,使得训练难度可以根据呼吸阶段的不同进行适应性变化,提高了呼吸训练的灵活性。
90.在控制模块300处于跟随训练模式的情况下,进气口201的进气量为dv1,计算单元307获取p1和p2,当p1超出p2的值达到第一阈值时,控制模块300控制第二控制阀208和第三控制阀209保持部分开启,调节腔204的进气量为dv2,调节腔204的排气量为dv3,使得p1超出
p2的值与第一阈值保持相同,活塞205向远离进气口201的方向移动,第一阈值可以根据训练难度调整,例如第一阈值越大,训练腔203内第一压力p1就越大,推动活塞205运动的难度就越大。第二控制阀208向调节腔内充气来源于设置在壳体210内部的充气装置207。
91.优选地,控制模块300按照第二压力先增后减或连续增减的方式设置有波动训练模式,在活塞205基于呼出气体压缩调节腔204的情况下,调节腔204对活塞205的阻力随第二压力的变化而变化。波动训练模式中,呼气初期阶段,呼气阻力随着活塞205压缩调节腔204而逐渐增大,呼气发展阶段,调节腔204内气体压力达到一设定最大值后逐步下降,呼气末尾阶段,调节腔内气体压力较低,呼气阻力也较小;波动训练模式可以在呼气的不同阶段保证适当的呼气阻力,可以更好地辅助患者心肺功能的恢复。同时,第二压力也可是设置为波动式的增减,使得波动式的呼气阻力能够对呼吸肌肉进行针对性训练,提高呼吸耐力。
92.优选地,控制模块300按照预设次数的稳压训练模式、跟随训练模式和波动训练模式中的至少两种以预设频率进行组合的方式设置有频率训练模式,预设次数和预设频率可以依据呼吸训练强度在显示屏212上进行调整。
93.例如,稳压训练模式和跟随训练模式交叉进行,稳压训练模式相对来说训练难度会更大,在以预设频率进行预设次数的稳压训练后,转换为跟随训练模式,降低呼吸强度,可以缓解呼吸疲劳,预设次数的跟随训练后再转入稳压训练模式,适用于中低频率的慢速呼吸训练;波动训练模式和跟随训练模式交叉进行,波动训练模式,可以设置一较高压力阈值以锻炼呼气初期的爆发力,若干次波动训练后转入跟随训练模式,适用于低频率的快速呼气训练。
94.优选地,显示屏212可基于设置在显示屏212上的按键选择训练模式并对不同训练模式中的训练参数进行控制,声光模拟组件213可基于不同的训练模式或训练参数输出动态变化的声音或光影。例如,显示屏212设置有训练模式切换按键,用于在稳压训练模式、跟随训练模式或频率训练模式之间切换;显示屏212设置有若干功能按键,可用于调节第二压力稳压值、第一阈值、预设倍数、预设次数、预设频率等参数;按键可以是实体按键或触屏按键;声光模拟组件213可以根据也设置有多重预设方案,可以基于显示屏212进行切换或选择,可实现多样化方案的灵活选择,增强呼吸训练的趣味性和参与感。
95.优选地,控制模块300可基于计算单元307对活塞205行程数据h和包围尺寸数据l做周期性分析。控制模块300获取活塞205随时间变化的行程数据h和环带包围尺寸数据随时间变化的数据l,计算单元307分析活塞205行程h和包围尺寸l的时间变化曲线,输出活塞205行程数据h的第一周期和包围尺寸数据l的第二周期。
96.优选地,显示屏212以不同的背景颜色区分不同的训练模式,显示屏212布置有动态展示区,动态展示区内可以设置理想曲线和实时曲线,基于控制模块300当前的呼吸训练模式,理想曲线将预设频率、理想行程以动态的形式展示在显示屏212上,实时曲线将控制模块300采集的实时频率、行程数据和存储单元306的历史数据动态地展示在显示屏212上,可以为患者提供参考或调整依据。
97.优选地,显示屏212包括用于输出训练完成度和评价数据的参考显示区,控制模块300可基于计算单元307对存储单元306的历史数据分析得出患者训练完成度和评价数据,并输出至显示屏212的参考显示区。
98.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开
内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1