一种上肢康复训练系统及主动运动装置的制作方法
1.本实用新型涉及一种上肢康复训练系统及主动运动装置,属于电气技术领域。
背景技术:
2.上肢康复系统用来给上肢功能障碍患者提供辅助运动康复训练,包含主动运动方式和被动运动方式。其中由机器带动人体上肢的运动称为被动运动;由人带动机器运动称为主动运动。
3.当采用主动运动方式的时候,主动运动装置包括应变传感器、控制器和电机。人体对机器施加一定的力,所施加的力的大小被应变传感器采集,应变传感器将采集的信息发送至控制器,控制器通过算法识别力的方向和大小,来判断人的运动意图,从而控制相应电机的运动速度和位置。控制器是整个上肢智能康复训练系统的控制核心,并且控制器为数字型的,因此进入控制器的数据必须是数字的,而应变传感器所采集的信号是模拟量,为了转换成控制器可以识别和通讯的信号,需要对应变传感器输出的信号进行a/d转换。
4.现有的主动运动装置中力的采集是通过机械臂末端(机械末端也即手部机构) 安装的一个六维力传感器实现的,六维力传感器仅仅在机械臂末端安装一个。六维力传感器的具体结构如图1所示,并且六维力传感器能够同时测量六个方向的力和力矩,通过特殊的转换调节装置将外力信息以电压信号输出。六维力传感器有六个输出通道,分别代表每一个方向外荷载的大小,输入和输出的计算复杂,具体六维力传感器的计算原理可参考作者为张思远、名称为“一种新型高精度六维力传感器的设计与研究”的暨南大学论文和作者为刘朋、名称为“基于高次曲线的并联式六维力传感器静态标定”的华北理工大学论文。
5.然而六维力传感器安装在末端,需要对末端的不同方向的外力进行计算,进而控制器根据每个方向的力计算出每个关节的控制量以控制每个关节电机工作。可以看出六维力传感器在得到每个方向的力时进行了复杂的运算,运算便存在误差,因此采用六维力传感器作为每个方向力的输入并不准确,进而使得控制器的控制量不准确,导致康复训练的训练效果差;同时六维力传感器的价格在2.5到 3万,成本较高。
6.综上,现有的主动运动方式成本高、准确性低,导致训练效果差。
技术实现要素:
7.本技术的目的在于提供一种主动运动装置,用以解决现有主动运动方式成本高、准确性低的问题,同时还提出一种上肢康复训练系统,用以解决现有的训练系统训练效果差的问题。
8.为实现上述目的,本技术提出了一种上肢康复训练系统的技术方案,包括立柱、与立柱连接的横梁、大臂连杆、小臂连杆、手部机构以及主动运动装置,主动运动装置包括肩关节电机组件、肘关节电机组件、腕关节电机组件以及控制器,横梁和大臂连杆通过肩关节电机组件连接,大臂连杆和小臂连杆通过肘关节电机组件连接,小臂连杆和手部机构通过腕关节电机组件连接,控制器控制连接各关节电机组件中的电机,各关节电机组件还包括
减速器、输出转接件和固定件,各关节电机组件的输出转接件和固定件均通过连接件连接,各连接件上均固定有一维应变传感器,当固定件运动时,连接件发生形变,进而使得一维应变传感器的感应部分发生形变而检测出应变力;或者各输出转接件与对应的固定件均通过一维应变传感器连接,当固定件运动时,使得一维应变传感器的感应部分发生形变而检测出相应的应变力;各一维应变传感器通过a/d处理模块连接控制器的输入端。
9.本实用新型的上肢康复训练系统的技术方案的有益效果是:本实用新型的主动运动装置中当各关节电机组件中的输出转接件和固定件通过连接件连接时,各连接件上均固定有一维应变传感器,训练者施加力后,固定件发生运动,当固定件运动时,连接件发生形变,进而使得一维应变传感器的感应部分发生形变而检测出应变力;当各输出转接件与对应的固定件均通过一维应变传感器连接时,训练者施加力后,固定件发生运动,使得一维应变传感器的感应部分发生形变而检测出相应的应变力;不管是上述哪种情况在检测到应变力后将应变力发送至控制器,控制器驱动相应的电机协助训练者锻炼。本实用新型通过若干个一维应变传感器对不同的关节的应变进行直接检测,提高了控制器输入量的准确性,使得控制更加准确,运动更加流畅,柔顺性更好,进而提高训练效果,并且一维应变传感器的价格在300到500之间,大大降低了系统成本。
10.进一步地,为了提高肩部运动的灵活性,肩关节电机组件包括第一肩关节电机组件、第二肩关节电机组件和第三肩关节电机组件,横梁和第一肩关节连杆通过第一肩关节电机组件连接,第一肩关节连杆和第二肩关节连杆通过第二肩关节电机组件连接,第二肩关节连杆和大臂连杆通过第三肩关节电机组件连接。
11.进一步地,为了保证输出转接件和固定件连接的可靠性,所述连接件为连接轴。
12.进一步地,为了提高模数转换的可靠性,a/d处理模块包括芯片ad7606。
13.进一步地,为了保证应变信号的准确性,各一维应变传感器的输出端通过放大电路连接a/d处理模块。
14.进一步地,为了提高信号放大的准确性,所述放大电路包括芯片ad620和芯片lm324。
15.另外,本技术还提出一种主动运动装置的技术方案,主动运动装置包括肩关节电机组件、肘关节电机组件、腕关节电机组件以及控制器,肩关节电机组件用于连接横梁和大臂连杆,肘关节电机组件用于连接大臂连杆和小臂连杆,腕关节电机组件用于连接小臂连杆和手部机构,控制器控制连接各关节电机组件中的电机,各关节电机组件还包括减速器、输出转接件和固定件,各关节电机组件的输出转接件和固定件均通过连接件连接,各连接件上均固定有一维应变传感器,当固定件运动时,连接件发生形变,进而使得一维应变传感器的感应部分发生形变而检测出应变力;或者各输出转接件与对应的固定件均通过一维应变传感器连接,当固定件运动时,使得一维应变传感器的感应部分发生形变而检测出相应的应变力;各一维应变传感器通过a/d处理模块连接控制器的输入端。
16.本实用新型的主动运动装置的技术方案的有益效果是:本实用新型的主动运动装置中当各关节电机组件中的输出转接件和固定件通过连接件连接时,各连接件上均固定有一维应变传感器,训练者施加力后,固定件发生运动,当固定件运动时,连接件发生形变,进而使得一维应变传感器的感应部分发生形变而检测出应变力;当各输出转接件与对应的固定件均通过一维应变传感器连接时,训练者施加力后,固定件发生运动,使得一维应变传感
器的感应部分发生形变而检测出相应的应变力;不管是上述哪种情况在检测到应变力后将应变力发送至控制器,控制器驱动相应的电机协助训练者锻炼。本实用新型通过若干个一维应变传感器对不同的关节的应变进行直接检测,提高了控制器输入量的准确性,并且一维应变传感器的价格在300到500之间,大大降低了系统成本。
17.进一步地,为了提高肩部运动的灵活性,肩关节电机组件包括第一肩关节电机组件、第二肩关节电机组件和第三肩关节电机组件,横梁和第一肩关节连杆通过第一肩关节电机组件连接,第一肩关节连杆和第二肩关节连杆通过第二肩关节电机组件连接,第二肩关节连杆和大臂连杆通过第三肩关节电机组件连接。
18.进一步地,为了保证应变信号的准确性,各一维应变传感器的输出端通过放大电路连接a/d处理模块。
19.进一步地,为了提高信号放大的准确性,所述放大电路包括芯片ad620和芯片lm324。
附图说明
20.图1是现有技术六维力传感器的结构图;
21.图2是本实用新型上肢康复训练系统的结构示意图;
22.图3是本实用新型上肢康复训练系统的局部结构图;
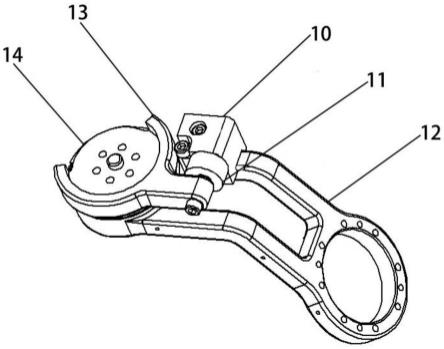
23.图4是本实用新型关节电机组件的结构示意图;
24.图5是本实用新型一维应变传感器的安装示意图;
25.图6是本实用新型a/d转换示意图;
26.图7是本实用新型放大电路的电路原理图;
27.图8是本实用新型a/d处理模块的电路原理图;
28.图中:1为横梁、2为第一肩关节电机组件、3为第一肩关节连杆、4为第二肩关节电机组件、5为第二肩关节连杆、6为大臂连杆、7为小臂连杆、8为第三肩关节电机组件、9为肘关节电机组件、10为固定件、11为一维应变传感器、 12为下关节连杆、13为输出转接件、14为减速器的输出轴、15为电机、16为减速器、17为上关节连杆、18为限位块。
具体实施方式
29.上肢康复训练系统实施例:
30.上肢康复训练系统如图2、图3所示,包括立柱(图2中的p1)、横梁1、第一肩关节连杆3、第二肩关节连杆5、大臂连杆6(图2中的l1)、小臂连杆 7(图2中的l2)、手部机构(图2中的矩形)和主动运动装置。
31.主动运动装置包括第一肩关节电机组件2(图2中的r1)、第二肩关节电机组件4(图2中的r2)第三肩关节电机组件8(图2中的r3)、肘关节电机组件 9(图2中的r4)、腕关节电机组件(图2中的r5)、以及控制器。腕关节电机组件和手部机构在图3中未画出。
32.立柱为可升降的立柱,立柱与横梁1连接,横梁1包括立柱顶板、肩关节基座机构,肩关节基座机构用于固定第一肩关节电机组件2,并且第一肩关节电机组件2上固定第一肩关节连杆3的一端,第一肩关节连杆3的另一端通过第二肩关节电机组件4连接第二肩关节连杆5,第二肩关节连杆5通过第三肩关节电机组件8连接大臂连杆6,大臂连杆6通过肘关节
电机组件9连接小臂连杆7,小臂连杆7通过腕关节电机组件连接手部机构,手部机构包括手掌压板装置。
33.各关节电机组件如图4、图5所示均包括电机15、减速器16、减速器的输出轴14、输出转接件13、以及固定件10,固定件10固定在下关节连杆12上,上关节连杆17套设固定在减速器16上,上关节连杆17上设置有限位块18,防止转动超限。
34.关于上关节连杆17和下关节连杆12,是相对于关节电机组件的位置而言,以肘关节电机组件9为例,肘关节电机组件9对应的下关节连杆12为小臂连杆 7,对应的上关节连杆17为大臂连杆6。关于电机15和减速器16的工作过程以及连接关系为现有技术,这里不做过多介绍。
35.电机15转动后,由于减速器的输出轴14和输出转接件13通过螺钉固定连接,使得减速器16、减速器的输出轴14、以及输出转接件13同轴转动,输出转接件13与固定件10固定连接,使得输出转接件13转动时传动固定件10运动,固定件10运动后可带动下关节连接12运动。因此在电机15转动后,可带动对应的下关节连接运动。
36.上述为关节电机组件的工作原理,从其工作原理可以看出输出转接件13和固定件10之间的传动是通过输出转接件13与固定件10的连接件实现的,那么在主动运动过程中,如果下关节连杆12运动,会使得输出转接件13与固定件 10之间的连接件发生形变,因此在输出转接件13与固定件10之间安装一维应变传感器11,以通过应变力的检测确定下关节连杆12的运动情况。
37.一维应变传感器11的安装有以下两种方式:
38.1.输出转接件13与固定件10通过连接轴固定,连接轴的一端穿设在输出转接件13上,另一端穿设在固定件10上,一维应变传感器11固定在连接轴上,下关节连杆12运动时,固定件10运动;当固定件10运动时,连接轴发生形变,进而使得一维应变传感器11的感应部分发生形变而检测出应变力;
39.2.基于一维应变传感器11的结构,若一维应变传感器11本身两端自带两个应变感应轴时,如图5所示,例如型号为cdfsa-100kg的应变传感器,直接通过一维应变传感器11连接输出转接件13与固定件10,也即输出转接件13中穿设有一维应变传感器11的一个应变感应轴,固定件10中穿设有一维应变传感器 11的另一端的应变感应轴,下关节连杆12运动时,固定件10运动;当固定件 10运动时,使得一维应变传感器11的感应部分发生形变而检测出相应的应变力。
40.针对不同形状的一维应变传感器11有不同的安装方式,并且在每个关节电机组件的输出转接件13与固定件10之间均安装一维应变传感器11,将现有的六维力传感器更换为多个一维应变传感器11,实现主动运动的控制。
41.各一维应变传感器11通过a/d处理模块连接控制器的输入端,控制器的输出端控制连接各关节电机组件中的电机15。a/d处理模块如图6所示,用于将一维应变传感器11输出的模拟量转换为数字量,控制器用于根据人机交互力的数字量计算出每个电机15的控制量(包括转速和位置),以控制每个电机15 运动。
42.具体地,各一维应变传感器11所采集的模拟量经过如图7所示的放大电路后输入a/d处理模块,a/d处理模块对放大后的信号进行模/数转换。图7中(as1 是测试点标识),放大电路包括放大器ad620和运算放大器lm324。其中放大器ad620的两个输入端s1n和s1p用
于连接一维应变传感器11的输出端,放大器ad620的输出端连接运算放大器lm324的同相输入端,运算放大器lm324 的输出端ain1连接a/d处理模块。图7中,电阻r8e的阻值大小为49.9ω;电阻r5e、电阻r9e、电阻r13e、电阻r11e的阻值大小为1kω;电阻r7e的阻值大小为10kω;可调电阻rp5e的阻值大小为10kω;可调电阻rp12e的阻值大小为5kω;电容c6e、电容c9e、电容c5e、电容c8e的容值大小为104/50v。
43.a/d处理模块如图8所示,包括芯片ad7606,芯片ad7606为8通道16 精度的模数转换芯片,vo5~vo12接收各一维应变传感器11经过放大处理后的模拟量信号,16位数据输出至控制器(控制器采用控制芯片fpga),并且芯片 ad7606连接控制器,接收控制信号,通过对“控制信号”的控制,分时转换各通道的电压,实现8通道a/d转换。图8中,电阻r21~电阻r36的阻值大小为 10kω;电容c18~电容c25的容值大小为22pf;电容c15~电容c17、以及电容 c26的容值大小为10μf/10v。
44.上述实施例中,为了可靠的连接输出转接件13和固定件10,采用连接轴对输出转接件13和固定件10进行固定,作为其他实施方式,也可以直接采用连接块粘在输出转接件13和固定件10之间。
45.为了提高肩部活动的灵活性,采用了三个肩关节电机组件对肩部的运动进行驱动,作为其他实施方式,也可以采用两个或者一个肩关节电机组件对肩部的运动进行驱动,本实用新型对此不做限制。
46.关于a/d处理模块和放大电路,现有技术较为成熟,可以采用实现相同功能的电路进行替换,本实用新型对a/d处理模块和放大电路的具体形式并不做限制。
47.上述实施例中,为了提高应变力输入的准确性,通过放大电路对应变传感器采集的信号进行处理,作为其他实施方式,在保证信号准确性的基础上,也可以不设置放大电路。
48.上述的主动运动装置通过在各输出转接件13和对应的固定件10之间安装了一维应变传感器11,通过一维应变传感器11直接采集了控制器中各个关节的输入量,提高了输入量的准确性,降低了成本。
49.主动运动装置实施例:
50.主动运动装置的结构组成、连接关系在上述上肢康复训练系统实施例中已经介绍,这里不做赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1