一种竹材机械手刨片设备的制作方法
1.本发明涉及竹材加工领域,尤其一种竹材机械手刨片设备。
背景技术:
2.定向结构刨花板时由各种切碎的材料交错叠合,压制而成。已在欧美普遍应用。其定向结构刨花板是一种具有良好机械性能的材料,使其特别适用于建筑的承重应用。在中国缺乏林业资源的状况,我们务必加大竹材的应用。以竹材作为竹定向结构刨花板的原料,在刨切的设备,设计结构需提升至简单,易操作,自动化高的需求。
技术实现要素:
3.(一)发明目的本发明的目的是提供一种竹材机械手刨片设备,解决的是高效刨切竹片或木片用于竹材结构板制造的问题,提供一种安全可靠,自动化的机械手刨片机。
4.(二)技术方案为解决上述问题,本发明的第一方面提供了一种竹材机械手刨片设备,其特征在于,包括:设置于输送支架上两条输送带,所述输送带由输送电机驱动,用于输送物料;沿输送带运行方向设置有刨片装置和进料机械手;所述进料机械手设置于所述输送带上方,用于抓取输送带送来的物料,机械手底座设置于输送支架上,所述机械手底座上设置有左右旋转电机,所述左右旋转电机驱动机械手支架水平转动,上下旋转电机设置于所述机械手支架上,所述上下旋转电机通过机械臂驱动机械爪上下运动,所述机械爪上设置有抓取气缸,抓取气缸通过抓取连杆驱动抓取爪的开合;所述刨片装置设置于所述进料机械手运动范围内,两个入料架设置于刨片机底座上,分别位于输送带的两侧,所述刨片机底座上设置有竹青收集和竹片下料槽,用于将进料机械手送来的物料刨片;控制装置,与所述输送带、进料机械手和刨片装置信号连接,用于控制输送带、进料机械手和刨片装置。
5.进一步地,两条输送带呈125
°
,尺寸和速度相同。
6.进一步地,刨片装置前还设置有光检测器,所述光检测器设置于输送支架上,包括:设置于输送支架上的底座;所述底座上设置有转轴,转轴方向与输送带方向平行;所述转轴两端设置有摆动臂;一个摆动臂设置有光测发射器,另一个摆动臂设置有光测受光器;所述光测发射器与光测受光器设置于同一轴上;光测电机设置于所述光检测器上部;所述光测电机带动摆动连杆转动;所述摆动连杆通过连杆使摆动臂往复运动;摆动连杆上方设置有接近开关;光测传感器,设置于输送带上方。
7.进一步地,机械爪通过可调节连杆与机械手支架连接;所述可调节连杆设置有升降气缸,所述升降气缸驱动可调节连杆控制所述机械爪与输送带保持垂直。
8.进一步地,入料架包括:主压汽缸,用于压住竹筒进行刨削;压板汽缸,使压板伸入或退出竹筒座,用于物料进料。
9.进一步地,控制装置为plc。
10.进一步地,左右旋转电机设置有左接近开关和右接近开关;所述上下旋转电机设置有上接近开关和下接近开关;所述升降气缸两端和中间设置有3个磁感应传感器;所述抓取气缸两端设置有磁感应传感器。
11.进一步地,主压汽缸两端设置有磁感应传感器,所述压板汽缸两端设置有磁感应传感器。
12.根据本发明的另一个方面,一种基于上述竹材机械手刨片设备的控制方法,其特征在于,包括:输送控制,控制输送电机的速度,收到光测传感器的信号后,控制光测电机旋转,收到光测接近开关后,控制光测电机停止,在光测电机运行过程中,光测发射器会发射激光检测竹筒,如果光测受光器没有接受到激光,说明检测的这个竹筒是带竹节的;反之光测受光器接受到了激光,说明检测的这个竹筒是无节的;进料控制,升降气缸的电磁阀打开供气,到达伸出时的磁感应传感器位置,控制的电磁阀关闭供气,机械手保持在下的位置,在这个过程中上下旋转电机驱动旋转头向后旋转,到达上下旋转电机下接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向后动作,保持抓取机械手处于和输送带机垂直状态,竹筒到达抓取手后挡板时,机械手抓取气缸的电磁阀打开供气伸出,向下到达抓取气缸下磁感应传感器位置,抓取气缸电磁阀关闭供气停止,升降气缸电磁阀打开供气缩回,到达抓取气缸上磁感应传感器位置,升降气缸电磁阀关闭供气停止,升降气缸保持在中的位置,同时上下旋转电机驱动旋转头向前旋转,到达中间位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态,左右旋转电机,控制向左或向右动作,到达左或右接近开关位置,这两个位置抓取机械手的正下方是刨片机的两个竹筒座,收到左或右接近开关的检测的信号,抓取气缸的电磁阀打开供气缩回到气缸上磁感应传感器位置,抓取气缸的电磁阀关闭供气,左右旋转电机,向中间动作,回到开始位置,同时升降气缸的电磁阀打开供气缩回,到达升降气缸上磁感应传感器位置,升降气缸的电磁阀关闭供气停止,升降气缸保持在升降气缸上磁感应传感器的位置;同时上下旋转电机动作驱动旋转头向前旋转,到达上下旋转电机上接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态;刨片控制,物料进入,压板气缸的电磁阀打开供气缩回,到达压板气缸缩回磁感应传感器位置,压板气缸的电磁阀关闭供气,压板气缸的电磁阀打开供气伸出,到达压板气缸伸出磁感应传感器位置,压板气缸的电磁阀关闭供气;物料刨削,主压气缸的电磁阀打开供气伸出,到达主压气缸伸出接近开关位置,主压气缸的电磁阀关闭供气,主压气缸的电磁阀打开供气缩回到达主压气缸缩回接近开关位置,主压气缸的电磁阀关闭供气。
13.(三)有益效果本发明的上述技术方案具有如下有益的技术效果:适用于竹材定向结构刨花板生产线作为备料设备,也可生产各种尺寸的竹板材,应用广泛。本机结构合理,自动化高,不用人工运作,电控操作,生产能力高,安全性强,维修简单。
附图说明
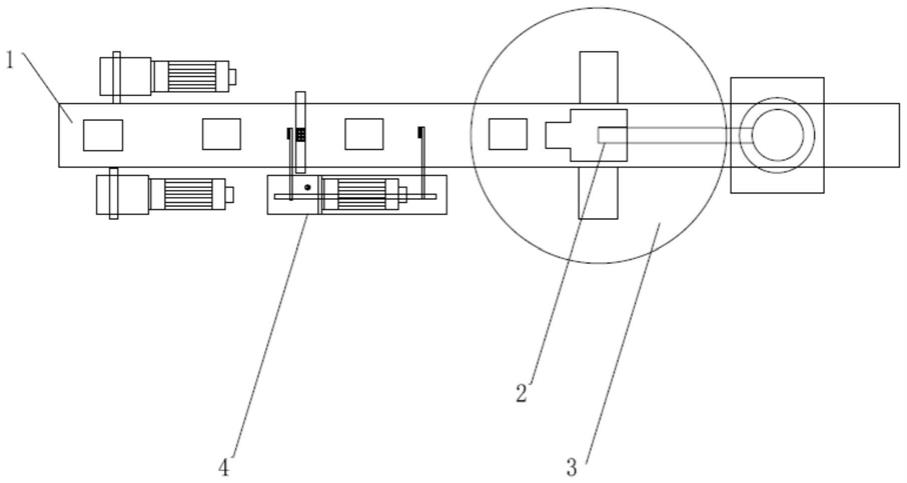
14.图1是竹材机械手刨片设备结构示意图;图2是光检测器截面图;图3是光检测器结构图;
图4是进料机械手结构图;图5是进料机械手抓取时结构图;图6是刨片装置结构图;图7是装有两台刨片装置的竹材机械手刨片设备结构示意图。
15.附图标记:1:输送带;2:进料机械手;3:刨片装置;4:光检测器;11:输送支架;12:输送电机; 21:机械手支架;22:上下旋转电机;23:左右旋转电机;24:升降气缸;25:抓取气缸; 26:磁感应传感器;27:接近开关;31:主压汽缸;32:压板汽缸;33:刨片机底座;34:竹青收集;35:竹片下料槽;36:磁感应传感器;37:接近开关;41:光测传感器;42:光测接近开关;43:光测发射器;44:光测受光器;45:光测电机;46:摆动连杆。
16.具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
18.如图1所示,本发明的一种竹材机械手刨片设备,包括:设置于输送支架上两条输送带,所述输送带由输送电机驱动,用于输送物料;沿输送带运行方向设置有刨片装置和进料机械手;所述进料机械手设置于所述输送带上方,用于抓取输送带送来的物料,机械手底座设置于输送支架上,所述机械手底座上设置有左右旋转电机,所述左右旋转电机驱动机械手支架水平转动,上下旋转电机设置于所述机械手支架上,所述上下旋转电机通过机械臂驱动机械爪上下运动,所述机械爪上设置有抓取气缸,抓取气缸通过抓取连杆驱动抓取爪的开合;所述刨片装置设置于所述进料机械手运动范围内,两个入料架设置于刨片机底座上,分别位于输送带的两侧,所述刨片机底座上设置有竹青收集和竹片下料槽,用于将进料机械手送来的物料刨片;控制装置,与所述输送带、进料机械手和刨片装置信号连接,用于控制输送带、进料机械手和刨片装置。
19.如图2和图3所示,两条输送带呈125
°
,尺寸和速度相同。竹筒输送由两条设计尺寸,速度相同的输送带呈125
°
夹角组成。两条输送带的输送电机内置旋转编码器,信号输入控制装置,速度容易控制,调整。调整速度在控制装置的人机界面上调整。竹筒在输送带上输送时,调整速度,使竹筒之间拉开一定的间距。由于输送带机呈125
°
夹角组成,中部较低,竹筒始终定位在中间运行,有效解决竹筒直径大小不等的问题。输送带机的长度,根据安装相同的两台或多台刨片装置来决定。
20.优选地,刨片装置前还设置有光检测器,所述光检测器设置于输送支架上,包括:设置于输送支架上的底座;所述底座上设置有转轴,转轴方向与输送带方向平行;所述转轴两端设置有摆动臂;一个摆动臂设置有光测发射器,另一个摆动臂设置有光测受光器;所述光测发射器与光测受光器设置于同一轴上;光测电机设置于所述光检测器上部;所述光测电机带动摆动连杆转动;所述摆动连杆通过连杆使摆动臂往复运动;摆动连杆上方设置有接近开关;光测传感器,设置于输送带上方。物料在输送带上运行到达光测传感器位置。光
测传感器把信号传输给控制装置,控制装置操控光测电机运行。光测电机内置旋转编码器和刹车系统。光测接近开关检测光测电机后面连接的摆动连杆。当控制装置控制光测电机运转一圈,被光测接近开关检测到,停止在光测接近开关检测位置。光测电机后面连接的摆动连杆也会运转一圈,驱动安装在同一根轴上的光测发射器和光测受光器,同时下上摆动一次。在这个摆动的过程中,光测发射器会发射激光,如果光测受光器没有接受到激光,说明检测的这个竹筒是带竹节的;反之光测受光器接受到了激光,说明检测的这个竹筒是无节的。光测受光器会把信号反馈给控制装置,控制装置控制机械手抓取相同的竹筒。
21.如图4和图5所示,机械爪通过可调节连杆与机械手支架连接;所述可调节连杆设置有升降气缸,所述升降气缸驱动可调节连杆控制所述机械爪与输送带保持垂直。左右旋转电机设置有左接近开关和右接近开关;所述上下旋转电机设置有上接近开关和下接近开关;所述升降气缸两端和中间设置有3个磁感应传感器;所述抓取气缸两端设置有磁感应传感器。机械手接收到控制装置的抓取信号,升降气缸由控制装置控制的电磁阀打开供气,到达伸出时的磁感应传感器位置,由控制装置控制的电磁阀关闭供气,机械手保持在下的位置。在这个过程中上下旋转电机驱动旋转头向后旋转,到达上下旋转电机下接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向后动作,保持抓取机械手处于和输送带机垂直状态。
22.竹筒到达抓取手后挡板时,机械手抓取气缸由控制装置控制的电磁阀打开供气伸出,向下到达抓取气缸下磁感应传感器位置;由控制装置控制的电磁阀关闭供气停止。这个过程中,抓取气缸连接的三抓已经将竹筒夹住。
23.升降气缸由控制装置控制的电磁阀打开供气缩回,到达抓取气缸上磁感应传感器位置,由控制装置控制的电磁阀关闭供气停止,升降气缸保持在中的位置。同时上下旋转电机驱动旋转头向前旋转,到达中间位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态。左右旋转电机,由控制装置控制向左或向右动作,到达左接近开关或右接近开关位置,这两个位置抓取机械手的正下方是刨片机的两个竹筒座。左接近开关或右接近开关将检测的信号反馈给控制装置,抓取气缸由控制装置控制的电磁阀打开供气缩回到气缸上磁感应传感器位置,抓取气缸由控制装置控制的电磁阀关闭供气。这个过程中抓取气缸连接的三抓已经将竹筒松开掉入竹筒座内压板上方。
24.左右旋转电机,由控制装置控制向中间动作,回到开始位置;同时升降气缸由控制装置控制的电磁阀打开供气缩回,到达升降气缸上磁感应传感器位置,由控制装置控制的电磁阀关闭供气停止,升降气缸保持在升降气缸上磁感应传感器的位置;同时上下旋转电机动作驱动旋转头向前旋转,到达上下旋转电机上接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态。
25.以上动作由控制装置控制,做重复动作向刨片机两个竹筒座供料。
26.如图6所示,入料架包括:主压汽缸,用于压住竹筒进行刨削;压板汽缸,使压板伸入或退出竹筒座,用于物料进料。主压汽缸两端设置有磁感应传感器,所述压板汽缸两端设置有磁感应传感器。
27.输送带安装在刨片装置的两个竹筒座之间,刨片装置前面是光检测器,后面是机械手支架。刨片机底座内的刀盘启动运转后。
28.压板气缸由控制装置控制的电磁阀打开供气缩回,到达压板气缸缩回磁感应传感器位置,控制装置控制的电磁阀关闭供气,这个过程中,压板气缸带动相应的压板缩回,压板退出竹筒座,压板上的竹筒掉入刨片机内。压板气缸由控制装置控制的电磁阀打开供气伸出,到达压板气缸伸出磁感应传感器位置,控制装置控制的电磁阀关闭供气,这个过程中,压板气缸带动相应的压板伸出,压板进入竹筒座。
29.主压气缸由控制装置控制的电磁阀打开供气伸出,到达主压气缸伸出接近开关位置,控制装置控制的电磁阀关闭供气,这个过程中,主压气缸带动相应的压板座体伸出,给压板加压施加给竹筒刨削。主压气缸由控制装置控制的电磁阀打开供气缩回到达主压气缸缩回接近开关位置,控制装置控制的电磁阀关闭供气,这个过程中,主压气缸带动相应的压板座体缩回,回到开始位置。
30.以上动作由控制装置控制,做重复动作,完成竹筒刨削。
31.如图7所示,竹材机械手刨片设备可以安装相同的两台光检测器和刨片装置。也可安装多台光检测器和刨片装置。
32.优选地,控制装置为plc。
33.本发明提供的竹材机械手刨片设备的控制方法,包括:输送控制,控制输送电机的速度,收到光测传感器的信号后,控制光测电机旋转,收到光测接近开关后,控制光测电机停止,在光测电机运行过程中,光测发射器会发射激光检测竹筒,如果光测受光器没有接受到激光,说明检测的这个竹筒是带竹节的;反之光测受光器接受到了激光,说明检测的这个竹筒是无节的;进料控制,升降气缸的电磁阀打开供气,到达伸出时的磁感应传感器位置,控制的电磁阀关闭供气,机械手保持在下的位置,在这个过程中上下旋转电机驱动旋转头向后旋转,到达上下旋转电机下接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向后动作,保持抓取机械手处于和输送带机垂直状态,竹筒到达抓取手后挡板时,机械手抓取气缸的电磁阀打开供气伸出,向下到达抓取气缸下磁感应传感器位置,抓取气缸电磁阀关闭供气停止,升降气缸电磁阀打开供气缩回,到达抓取气缸上磁感应传感器位置,升降气缸电磁阀关闭供气停止,升降气缸保持在中的位置,同时上下旋转电机驱动旋转头向前旋转,到达中间位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态,左右旋转电机,控制向左或向右动作,到达左或右接近开关位置,这两个位置抓取机械手的正下方是刨片机的两个竹筒座,收到左或右接近开关的检测的信号,抓取气缸的电磁阀打开供气缩回到气缸上磁感应传感器位置,抓取气缸的电磁阀关闭供气,左右旋转电机,向中间动作,回到开始位置,同时升降气缸的电磁阀打开供气缩回,到达升降气缸上磁感应传感器位置,升降气缸的电磁阀关闭供气停止,升降气缸保持在升降气缸上磁感应传感器的位置;同时上下旋转电机动作驱动旋转头向前旋转,到达上下旋转电机上接近开关位置,旋转时由旋转头连接的可调节连杆,带动抓取头向前动作,保持抓取机械手处于和输送带机垂直状态;刨片控制,物料进入,压板气缸的电磁阀打开供气缩回,到达压板气缸缩回磁感应传感器位置,压板气缸的电磁阀关闭供气,压板气缸的电磁阀打开供气伸出,到达压板气缸伸出磁感应传感器位置,压板气缸的电磁阀关闭供气;物料刨削,主压气缸的电磁阀打开供气伸出,到达主压气缸伸出接近开关位置,主压气缸的电磁阀关闭供气,主压气缸的电磁阀打开供气缩回到达主压气缸缩回接近开关位置,主压气缸的电磁阀关闭供气。
34.本发明设备刨切的竹筒或木材长度在80
‑
300mm,直径在200mm以内,刨切出的竹片或木片厚度为0.5
‑
2mm。
35.本发明的设备适用于竹质或木质定向结构刨花板和各种人造板生产线作为备料设备。也可作为专门生产竹大片或木片的单机使用。本机结构紧凑,合理,操作简便,生产能力高,安全可靠,维修方便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1