电子提花机电磁式传动机构的制作方法
1.本发明属于机械设备技术领域,涉及到开口运动机构,具体涉及一种电子提花机电磁式传动机构。
背景技术:
2.连杆式开口机构,由许多刚性杆件采用低副连接而成的机构,其作用是完成经纱的开口,同时还根据织物上机图所设定的顺序,控制综框升降次序,使织物获得所需要组织结构。
3.在织前的准备工序中,经纱按照穿综图的次序穿入综丝的综眼,并随综框筘等一起送到织机上,当综丝随着综框升降时,整幅经纱便同时分开为上下两层,形成一个能使梭子或引纬器、引纬介质通过的通道,即为梭口,以便于引人纬纱;当纬纱引人以后,两层经纱开始闭合,再上下交替以形成新的梭口,如此不断反复循环,从而实现经纬纱的交织。经纱随综框上下分开形成梭口的过程即为开口运动,曲柄连杆开口机构的作用便是完成经纱的开口,同时还应根据织物上机图所设定的顺序,控制综框的升降次序,使织物获得所需要的组织结构。
4.如今开口机构中属电子提花机的应用最为广泛且高效。
5.现有技术中存在的主要问题和不足包括:
6.申请号为“201811569333.0”的中国发明专利提出了一种电子提花机共轭凸轮驱动机构,采用共轭凸轮结构将电机扭矩转化为拉刀片驱动力。申请号为“201410626906.4”的中国发明专利提出了一种多杆式开口机构电子提花机,采用多杆式传动机构将电机扭矩转化为拉刀片驱动力。申请号为“201520209471.3”的中国实用新型专利提出了一种带有自动张紧器的电子提花机链轮传动机构,通过链条传动将电机扭矩传递给拉刀片,并通过自动张紧器自动调节链条松紧度,提升机器运转效率。
7.但是以上这些电子提花机传动机构在结构上均属于机械式传动装置,通过一系列的机械配合将旋转电机的扭矩转化为拉刀片的驱动力。目前企业跟高校对于此领域的研究重点主要放在如何减少材料体积以及能量利用率上,罕有在原理性上具有突破的研究。而机械式传动机构必然存在因其机械式的结构限制使得其传动效率较低、零部件间机械磨损严重及零部件之间因过盈配合的缘故不易维修等问题。
技术实现要素:
8.针对现有技术中存在的上述问题和不足,本发明提供了一种电子提花机电磁式传动机构,提升了提花机传动机构的传动效率,减少了零部件之间的磨损,增强能量利用率,同时使得维护保养变得更简单方便。
9.为此,本发明采用了以下技术方案:
10.一种电子提花机电磁式传动机构,包括永磁体定子、线圈动子组件、拉刀架板、小拉杆部件、拉刀片、机架和防磨滚轮;所述永磁体定子的上端与机架形成转动副,使左侧的
永磁体定子绕定点左右摆动,右侧的永磁体定子的上端固定于机架上;所述线圈动子组件包括连接件和动子线圈,位于永磁铁定子的下方,线圈动子组件上的连接件与拉刀架板之间通过滚动轴承形成转动副;所述拉刀架板与小拉杆部件通过滚动轴承形成转动副;所述小拉杆部件与拉刀片之间通过防磨轴套形成转动副;所述拉刀片与电子提花机的另一机构组件箱产生配合,组成滑动副来限制拉刀片在水平方向上的位移;所述防磨滚轮安装在右侧线圈动子组件的连接件上,通过与机架形成滑动副来限制右侧的线圈动子组件发生水平方向上的位移。
11.优选地,所述线圈动子组件的上下运动带动拉刀架板进行上下运动,所述拉刀架板的上下运动带动小拉杆部件进行上下运动,所述小拉杆部件的上下运动带动拉刀片进行上下运动。
12.优选地,所述永磁体定子为圆筒型直线电机的定子部分,所述线圈动子组件为圆筒型直线电机的动子部分。
13.优选地,所述永磁体定子由钕铁硼永磁体与十号钢导磁体构成,通过高强度粘结剂将钕铁硼永磁体与十号钢导磁体按照设定的尺寸、顺序进行粘结。
14.优选地,所述线圈动子组件由连接件与三相线圈组成,三相线圈按照设定相序缠绕在树脂材料上,然后将树脂材料与连接件进行粘结。
15.优选地,通过向线圈动子组件通入变化的三相交流电来为线圈动子组件提供沿永磁体定子方向上的推力。
16.优选地,圆筒型直线电机采用三相电流供电,通过控制三相电流的幅值、频率、相位起到控制动子推力的作用。
17.优选地,对圆筒型直线电机采用foc矢量控制,通过使用逆变器将两相直流电转变为三相交流电为电机供电,然后通过park变换与clark变换将三相交流电转变为直轴电流与交轴电流进行控制。
18.优选地,基于pid调参方式通过位置环与速度环的双闭环控制来调节直轴电流与交轴电流的大小,使其趋近于理想值。
19.优选地,所述永磁体定子与线圈动子组件之间存在气隙。
20.与现有技术相比,本发明的有益效果是:
21.(1)本发明提供了一种电子提花机电磁式传动机构,减少了中间传递构件的数量,降低了运动副的传递等级。
22.(2)采用圆筒型直线电机作为线性驱动装置的执行单元,提高了能量转化效率。
23.(3)只需要控制三相电流的频率与线圈动子的速度保持一定比例,即可令动子的受力维持稳定状态;可以通过增加线圈组数、增加线圈电流的方式实现电机推力的线性增加。
24.(4)结构简单,使用方便,容易维护保养。
附图说明
25.图1是本发明所提供的一种电子提花机电磁式传动机构的主视图。
26.图2是本发明所提供的一种电子提花机电磁式传动机构的右视图。
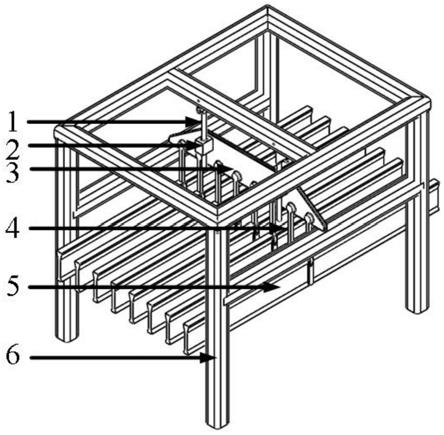
27.图3是本发明所提供的一种电子提花机电磁式传动机构的轴测图。
28.图4是本发明所提供的一种电子提花机电磁式传动机构所用圆筒型直线电机的结构图。
29.图5是电子提花机机械式传动机构拉刀片与旋转电机功率对比图。
30.图6是电子提花机电磁式传动机构定子与机架连接处结构图。
31.图7是电子提花机电磁式传动机构矢量控制的流程图。
32.图8是永磁体与线圈相对位置示意图。
33.图9是线圈受力和永磁体与线圈的相对位置关系图。
34.图10是本发明所提供的一种电子提花机电磁式传动机构的控制建模示意图。
35.图11是本发明所提供的一种电子提花机电磁式传动机构的调速效果图。
36.附图标记说明:1、永磁体定子;2、线圈动子组件;3、拉刀架板;4、小拉杆部件;5、拉刀片;6、机架;7、防磨滚轮。
具体实施方式
37.下面结合附图以及具体实施例来详细说明本发明,其中的具体实施例以及说明仅用来解释本发明,但并不作为对本发明的限定。
38.如图1-图3所示,本发明公开了一种电子提花机电磁式传动机构,包括永磁体定子1、线圈动子组件2、拉刀架板3、小拉杆部件4、拉刀片5、机架6和防磨滚轮7;所述永磁体定子1的上端与机架6形成转动副,使左侧的永磁体定子1绕定点左右摆动,右侧的永磁体定子1的上端固定于机架6上;所述线圈动子组件2包括连接件和动子线圈,位于永磁铁定子1的下方,线圈动子组件2上的连接件与拉刀架板3之间通过滚动轴承形成转动副;所述拉刀架板3与小拉杆部件4通过滚动轴承形成转动副;所述小拉杆部件4与拉刀片5之间通过防磨轴套形成转动副;所述拉刀片5与电子提花机的另一机构组件箱产生配合,组成滑动副来限制拉刀片5在水平方向上的位移;所述防磨滚轮7安装在右侧线圈动子组件2的连接件上,通过与机架6形成滑动副来限制右侧的线圈动子组件2发生水平方向上的位移。
39.具体地,所述线圈动子组件2的上下运动带动拉刀架板3进行上下运动,所述拉刀架板3的上下运动带动小拉杆部件4进行上下运动,所述小拉杆部件4的上下运动带动拉刀片5进行上下运动。
40.具体地,所述永磁体定子1为圆筒型直线电机的定子部分,所述线圈动子组件2为圆筒型直线电机的动子部分。
41.具体地,所述永磁体定子1由钕铁硼永磁体与十号钢导磁体构成,通过高强度粘结剂将钕铁硼永磁体与十号钢导磁体按照设定的尺寸、顺序进行粘结。
42.具体地,所述线圈动子组件2由连接件与三相线圈组成,三相线圈按照设定相序缠绕在树脂材料上,然后将树脂材料与连接件进行粘结。
43.具体地,通过向线圈动子组件2通入变化的三相交流电来为线圈动子组件2提供沿永磁体定子1方向上的推力。
44.具体地,圆筒型直线电机采用三相电流供电,通过控制三相电流的幅值、频率、相位起到控制动子推力的作用。
45.具体地,对圆筒型直线电机采用foc矢量控制,通过使用逆变器将两相直流电转变为三相交流电为电机供电,然后通过park变换与clark变换将三相交流电转变为直轴电流
与交轴电流进行控制。
46.具体地,基于pid调参方式通过位置环与速度环的双闭环控制来调节直轴电流与交轴电流的大小,使其趋近于理想值。
47.具体地,所述永磁体定子1与线圈动子组件2之间存在气隙。
48.实施例
49.如图1-图3所示,本发明提供了一种由圆筒型直线电机驱动的电子提花机电磁式传动机构,其包括:永磁体定子1;线圈动子组件2,包括连接件与动子线圈;拉刀架板3;小拉杆部件4;拉刀片5;机架6;防磨滚轮7。
50.如图6所示,左侧的永磁体定子1的上端与机架6形成转动副,令左侧永磁体定子1可以绕定点左右摆动;右侧的永磁体定子1的上端固定于机架6上。
51.通过向线圈动子组件2通入变化的三相交流电来为线圈动子组件2提供一定沿永磁体定子1方向上的推力。
52.线圈动子组件2上的连接件与拉刀架板3之间通过滚动轴承形成转动副,因此线圈动子组件2的上下运动会带动拉刀架板3进行上下运动。
53.拉刀架板3与小拉杆部件4通过滚动轴承形成转动副,因此拉刀架板3的上下运动会带动小拉杆部件4进行上下运动。
54.小拉杆部件4与拉刀片5之间采用防磨轴套形成转动副,因此小拉杆部件4的上下运动会带动拉刀片5进行上下运动。
55.拉刀片5与电子提花机的另一机构组件箱产生配合,组成滑动副来限制拉刀片5在水平方向上的位移。
56.通过防磨滚轮7安装在右侧的线圈动子组件2上的连接件上,通过与机架6形成滑动副来限制右侧的线圈动子组件2发生水平方向上的位移。
57.如图4所示,圆筒型直线电机由定子与动子构成,永磁体定子1为圆筒型直线电机的定子部分,线圈动子组件2为圆筒型直线电机的动子部分。
58.永磁体定子1的结构由钕铁硼永磁体与十号钢导磁体构成,通过高强度粘结剂将钕铁硼永磁体与十号钢导磁体按照一定尺寸、顺序进行粘结。
59.线圈动子组件2由三相线圈与连接件组成。三相线圈按照一定相序缠绕在树脂材料上,然后将树脂材料与连接件进行粘结。
60.传统机械式的电子提花机传动机构的能量浪费有两个方面,一是维持中间传动构件的稳定运动也需要消耗一定的能量,二是在多级运动副的传递下会存在严重的摩擦损耗。而本申请所提出的结构减少了中间传递构件的数量,降低了运动副的传递等级。
61.针对第一种形式的能量损耗,本发明通过运动学与动力学的分析后得到了拉刀片的驱动功率曲线以及旋转电机的输出功率曲线,参考图5中所示曲线,可以明显看出机械式传动机构存在明显的能量损耗,其传动效率在59.6%左右。
62.针对第二种形式的能量损耗,本发明通过对机械式传动机构进行结构分析可知,其传动机构可抽象为采用1个联轴器、2个齿轮传动以及7处转动副进行串联得到。在其转动副处均采用轴承传动,因此根据机构间的常见传动效率进行估算,得到的传动效率结果为75.2%。
63.以上两种能量损耗可以认为是线性耦合的,因此总的效率为42.48%。
64.经过本发明优化以后,减少了中间构件,因此第一种形式的能量损耗降低;传动副的级别减少,因此第二种形式的能量损耗降低也随之降低。由于采用了直线电机作为驱动单位,因此本发明也对直线电机的功率损耗做了一定分析。
65.直线电机的功率公式如下
[0066][0067]
其中:第一项代表了电机的热损耗,第二项代表了涡流损耗,第三项代表了输出的电磁推力。根据查阅相关文献可以发现直线电机的第一种及第二种能量损耗通常只占据整个电机功率的5%不到,因此直线电机的能量转化效率也是非常高效的。
[0068]
永磁体定子1与线圈动子2组件之间存在一定气隙,该处会存在大量由永磁体产生的磁场,通电的线圈中的电子在磁场的作用下产生洛伦兹力,宏观上就是安培力,该安培力可以分解为径向与横向。
[0069]
其中径向安培力由于线圈的环形结构相互抵消、横向安培力给予线圈平行于动子方向的推力。可以根据下式对电机推力进行推算,其中j为线圈中的电流密度,u0是真空磁导率为常数,m为永磁体的磁化密度,其余参数如图8所示。
[0070][0071]
根据上式可以推导出通电线圈与永磁体之间的相互作用力的大小与线圈中心距离永磁体中心的长度有非线性关系,如图9所示。根据该性质,可以知道采用合适长度的线圈进行组合,在通入相同电流后,可以使得任一线圈的受力相同。基于这一特性,本发明采用三相线圈作为动子线圈,三相线圈在通入三相电流后会产生行波磁场,从宏观上看,该行波磁场与永磁体所产生的定子磁场之间产生相互作用力;从微观上看,三相线圈中的电流受到磁场作用,产生洛伦兹力。
[0072]
因此只需要控制三相电流的频率与线圈动子的速度保持一定比例,即可令动子的受力维持稳定状态,根据上式可以看出,受力大小与电流大小呈线性关系,因此可以通过增加线圈组数、增加线圈电流的方式实现电机推力的线性增加。
[0073]
本发明中的圆筒型直线电机采用三相电流供电,通过控制三相电流的幅值、频率、相位可以起到控制动子推力的作用。依据这一基础原理,本发明决定采用foc(field-oriented control)-矢量控制,该方法通过使用逆变器将两相直流电转变为三相交流电为电机供电,然后通过park变换与clark变换将三相交流电转变为直轴电流id与交轴电流iq进行控制。基于pid调参方式通过位置环与速度环的双闭环控制来调节直轴电流id与交轴电流iq的大小,使其趋近于理想值。
[0074]
具体实现方法是基于该机构的运动学分析结果,可以得到被控制点的位移、速度和加速度曲线,利用此曲线数据作为机械运动方程的输入值,可求解出所需驱动力,机械运动方程如下
[0075][0076]
f
em
为电磁推力、f
l
为负载阻力、m为质量、d为粘滞摩擦系数。
[0077]
基于上式所求的电磁推力fem,再利用推力方程、电压方程与磁链方程进行iq_ref的求解。
[0078]
推力方程:
[0079][0080]
磁链方程:
[0081]
ψ
d
=l
d
i
d
+ψ
f
+m
dq
i
q
[0082]
ψ
q
=l
q
i
q
+m
dq
i
d
[0083]
电压方程:
[0084][0085][0086]
将iq_ref作为pid调参方式的输入参数,然后采用foc控制方式令被控制点的轨迹在线性驱动装置的作用下与原先的保持一致,其动子当前速度与位移由光栅尺来进行计算,作为负反馈的一环来修正当前动子位置,可以保证运行位移精度达到微米级。
[0087]
foc控制的流程图如图7所示,在圆筒型直线电机的动子组件的一侧安装一个光栅尺读头,在读头对应的一侧安装光栅尺,作为图7中所示的位置与速度监测器,然后采用id=0的控制策略,根据光栅检测器所反馈回来的动子当前速度和位置信息与期待速度和位置信息进行对比,根据其差值经过pid调控后得到的输出值去修改当前三相电流值大小。
[0088]
依据当前流程在matlab/simulink中进行建模仿真,所建模型如图10所示,调速效果如图11所示,可以看出在合适的pid参数下,经过0.017s的时间后可以令速度达到预期值,且无超调发生。
[0089]
以上所述仅为本发明的较佳实施例,并不用于限制本发明,凡在本发明的精神和原则范围之内所作的任何修改、等同替换以及改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1