餐具清洗机和智能橱柜的制作方法
[0001]
本发明涉及餐具自动清洗设备技术领域,尤其涉及一种餐具清洗机和智能橱柜。
背景技术:
[0002]
现有的滚筒式洗碗机多数会设置隔离结构以把各个餐具隔离放置,避免在滚动清洗的过程中餐具之间产生碰撞或接触重叠,从而防止餐具碰撞损坏或者没有清洗干净。如专利文献cn210019238u公开的一种自动洗碗机,包括上端面设置有取放餐具窗口的洗碗机机身、餐具自动松夹机构(即餐具固定机构),以及用于驱动餐具自动松夹机构从叶轮状安装板朝取放餐具窗口翻转的铰板翻转驱动装置;自动洗碗机的内腔设置有转动主轴以及沿转动主轴周向固设的叶轮状安装板;餐具自动松夹机构,包括第一餐具夹持板、第二餐具夹持板、第一摆杆与第二摆杆,第一摆杆与第二摆杆分别铰接于叶轮状安装板上不同的点;第一摆杆的另一端固设于第一餐具夹持板的底部,第二餐具夹持板与第一餐具夹持板可沿一个平面相互接近或相离地滑动连接,第二摆杆的另一端铰接于第二餐具夹持板的底部;第一摆杆与第二摆杆用于:在餐具自动松夹机构从叶轮状安装板朝取放餐具窗口翻转时,驱动第二餐具夹持板远离第一餐具夹持板地滑动而松开餐具;在餐具自动松夹机构从取放餐具窗口朝叶轮状安装板翻转时,驱动第二餐具夹持板趋近第一餐具夹持板地滑动而夹紧餐具。由于第一摆杆的和第二摆杆的铰接点在不同位置,第一餐具夹持板和第二餐具夹持板在绕各自对应的铰接点转动的过程中,其二者之间的距离会出现趋近或者远离的情况。该专利文献正是利用这个原理实现在餐具自动松夹机构绕铰接点转动来控制对餐具的松夹。
[0003]
该餐具自动松夹机构是利用第一餐具夹持板和第二餐具夹持板来夹住餐具的底承托座从而固定餐具的,餐具的底承托座的大小需与两个餐具夹持板的夹持间距匹配。若餐具的底承托座大于或小于夹持间距,则无法使用该餐具自动松夹机构进行夹持。也就是说该餐具自动松夹机构只能适用于底承托座大小匹配的餐具,无法适用于未设有底承托座的餐具或者底承托座大小不匹配的餐具。
技术实现要素:
[0004]
本发明所要解决的技术问题是提供一种餐具清洗机以及包括该餐具清洗机的智能橱柜,该餐具清洗机能适用于底承托座大小不同的或者不具有底承托座的餐具。
[0005]
为了解决上述技术问题,本发明的一种餐具清洗机,包括设有餐具放置位的承载座,该餐具清洗机包括清洗腔,承载座可把放在餐具放置位的餐具带入洗碗腔中,餐具放置位处设有凸起部,餐具以倒扣罩住凸起部的方式放在餐具放置位;该餐具清洗机包括背拦件,在承载座位于洗碗腔中的状态下,背拦件在餐具背面拦住。
[0006]
进一步地,背拦件与承载座联动,在承载座把放在餐具放置位的餐具带入洗碗腔的过程中,背拦件同步移动至餐具背面拦住。
[0007]
进一步地,承载座为背拦件配有导轨,背拦件沿着导轨移动到餐具背面拦住。
[0008]
进一步地,包括驱动装置,其同时驱动承载座和背拦件以实现上述联动。
[0009]
进一步地,乃滚筒式餐具清洗机,具体地:清洗腔中部横置有中心转轴,从该中心转轴径向伸出有多个旋转叶片,承载座相应地有多个,与旋转叶片一一对应,承载座的第一侧铰接对应的旋转叶片的末端;承载座绕其第一侧转动靠向对应的旋转叶片直至移入清洗腔中与该旋转叶片叠合;叠合状态下,旋转叶片带动对应的承载座一起绕中心转轴旋转。
[0010]
进一步地,在旋转叶片上装有径向移动的移动件;还包括第一连杆和第二连杆,第一连杆一端铰接对应的承载座的非第一侧的部位,另一端铰接移动件,第二连杆一端铰接第一连杆的中部,另一端连接背拦件;移动件朝中心转轴径向移动,则通过第一连杆来拉动对应的承载座绕其第一侧转动靠向旋转叶片直至移入清洗腔中与旋转叶片叠合。
[0011]
进一步地,在旋转叶片上装有驱动所述移动件径向移动的驱动装置。
[0012]
进一步地,旋转叶片末端朝上,承载座位于旋转叶片上方,具体系绕自身第一侧向下转动靠向旋转叶片;餐具放置位具体系朝上伸出所述凸起部。
[0013]
进一步地,该餐具清洗机顶部开有餐具取放窗口,承载座平置于该餐具取放窗口中,具体系从该餐具取放窗口移入清洗腔中。
[0014]
进一步地,导轨有多层,高低排列,背拦件可拆卸地安装到其中任一层导轨中。
[0015]
进一步地,餐具放置位有多个,沿承载座第一侧的侧边排列;背拦件和移动件都是长条状,都沿承载座第一侧的侧边设置;对应餐具放置位排列的始端和末端都设有所述的导轨,背拦件两端分别安装在两端的导轨中;以第一连杆和第二连杆作为一个连杆传动组,该连杆传动组有两个,对称地设置在移动件两端。
[0016]
进一步地,所述凸起部开有喷水孔,对倒扣罩住凸起部的餐具的内壁进行喷洗。
[0017]
进一步地,包括为凸起部供水的供水机构。
[0018]
一种智能橱柜,包括餐具清洗机以及用于控制餐具清洗机运行的总控单元,所述餐具清洗机为上述的餐具清洗机。
[0019]
餐具以倒扣罩住凸起部的方式放在餐具放置位,在承载座位于洗碗腔中的状态下,背拦件在餐具背面拦住,从而把餐具固定在餐具放置位上。该洗碗机能适用于底承托座大小不同的或者不具有底承托座的餐具。
附图说明
[0020]
图1是一种滚筒式洗碗机的整体结构图;
[0021]
图2是图1的滚筒式洗碗机隐去外壳后的结构示意图;
[0022]
图3是一种滚筒式洗碗机的清洗腔的腔体结构示意图,图中隐去了前腔壁,图中左侧两个消毒灯朝清洗腔内,右侧两个消毒灯朝清洗腔外;
[0023]
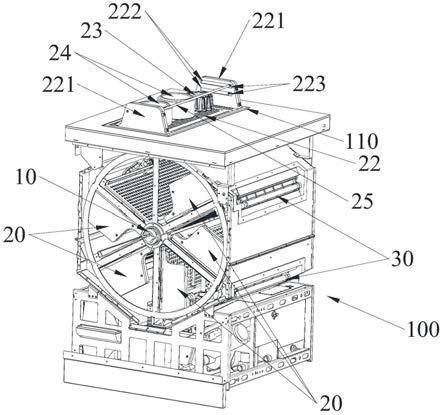
图4是一种滚筒式洗碗机的餐具固定机构处于打开状态时的结构示意图;
[0024]
图5是一种滚筒式洗碗机的餐具固定机构处于打开状态时的结构示意图,图中的餐具固定机构是横置的,以便于读者看到其具体结构;
[0025]
图6是一种滚筒式洗碗机的餐具固定机构处于收起状态时的正面结构示意图;
[0026]
图7是一种滚筒式洗碗机的餐具固定机构处于收起状态时的背面结构示意图,图中隐去了旋转叶片;
[0027]
图8是一种滚筒式洗碗机的消毒灯机构处于收起状态时的结构示意图;
[0028]
图9是一种滚筒式洗碗机的消毒灯机构处于收起状态时隐去安装框之后的结构示
意图.
[0029]
附图标记:100、滚筒式洗碗机;110、餐具取放窗口;120、容置槽;10、中心转轴;20、餐具固定机构;21、旋转叶片;22、承载座;221、侧块;222、导轨;223、滑动块;224、滑动座;23、凸起部;231、进水口;24、餐具;25、背拦杆;26、移动杆;27、第一连杆;28、第二连杆;291、电机;292、丝杆;30、消毒灯;31、隔板;32、电机;33、曲柄结构;34、旋转轴;35、安装框;36、复位行程开关;41、径向供水支管路;42、轴向供水支管路;43、旋转出水管路;44、进水管路。
具体实施方式
[0030]
一种智能橱柜包括如图1所示的滚筒式洗碗机100以及用于控制该滚筒式洗碗机100运行的总控单元。如图2所示,滚筒式洗碗机100内部设有清洗腔,清洗腔中部横置有中心转轴10,中心转轴10端部外表面设有齿圈(图中未示出),清洗腔腔壁外侧设有旋转电机(图中未示出),旋转电机通过与齿圈啮合的齿轮来驱动中心转轴10旋转。
[0031]
从该中心转轴10径向伸出有多个餐具固定机构20。餐具固定机构20如图4所示,包括旋转叶片21和承载座22。旋转叶片21始端固定在中心转轴10上,末端铰接承载座22的右侧。如图4所示,承载座22上设有三个餐具放置位,餐具放置位朝上伸出有凸起部23,其中有两个餐具放置位放置有餐具24。承载座22前、后两侧各自朝上伸出有侧块221,侧块221上开有高低排列的两层导轨222,每层导轨222中装有滑动块223。在本实施例中,位于同一侧的两个滑动块223固定在同一个滑动座224上。餐具放置位上方设有背拦杆25。图中,背拦杆25两端安装在上层导轨222的滑动块223上。若餐具的高度较矮,用户则可把背拦杆25从上层导轨222的滑动块223上拆卸下来,然后安装在下层导轨222的滑动块223上。同理,用户可以把背拦杆25从下层导轨222的滑动块223上拆卸下来,然后安装在上层导轨222的滑动块223上。如图5所示,旋转叶片21上设有移动杆26(即移动件),还设有电机291以及连接电机291的输出轴的丝杆292,移动杆26通过螺纹孔套设在丝杆292上。旋转叶片21和承载座22之间设有两个连杆传动组,连杆传动组包括第一连杆27和第二连杆28。以图5中靠近读者的一端为前方,以图中左侧为左方,移动杆26前、后两端分别铰接两根第一连杆27左端。在前方的第一连杆27右端铰接承载座22的前侧边中部,在后方的第一连杆27右端铰接承载座22的后侧边中部。两根第二连杆28近端分别铰接两根第一连杆27中部,两根第二连杆28远端分别固定连接两侧的滑动座224。
[0032]
该智能橱柜的柜面设有电连接总控单元的触控面板。该滚筒式洗碗机100包括电连接总控单元的控制器。用户若需要清洗餐具,则在触控面板上点击餐具放置按钮,从而触发餐具放置指令,总控单元则向滚筒式洗碗机100的控制器发出餐具放置指令。滚筒式洗碗机100顶部开有餐具取放窗口110,并设有用于封闭该餐具取放窗口110的电动盖板(图中未示出)。清洗腔顶部的腔壁上设有摄像头,滚筒式洗碗机100的控制器接收到餐具放置指令后,通过摄像头识别出有空置的餐具放置位的餐具固定机构20,使电动盖板打开餐具取放窗口110,然后使旋转电机驱动中心转轴10转动,使有空置的餐具放置位的餐具固定机构20转动至餐具取放窗口110下方,此时,餐具固定机构20处于如图6所示的收起状态,旋转叶片21末端朝上,餐具放置位上未放置有图6中所示的餐具24。如图7所示,控制器控制电机291驱动丝杆292旋转,从而驱动移动杆26从旋转叶片21的始端(即移动杆26在图7中的位置)径向移动至旋转叶片21末端,在此过程中,第一连杆27随着移动杆26径向移动,从而推动承载
座22绕其与旋转叶片21的铰接处向上转动直至垂直于旋转叶片21,与此同时,第一连杆27亦带动第二连杆28向上移动,从而使得第二连杆28带动滑动座224移动,从而使滑动块223带动背拦杆25沿着导轨222滑动至最右端,此时,餐具固定机构20转换为如图4所示的打开状态,承载座22平置于餐具取放窗口110中,如图1或图2所示。由于背拦杆25位于最右端,餐具放置位没有被阻拦住,用户则可把脏餐具24倒扣在凸起部23上从而罩住凸起部23,如图1所示。
[0033]
放置好脏餐具24后,用户就可以在触控面板上点击收起按钮,从而触发收起指令。总控单元把收起指令发送给滚筒式洗碗机100的控制器,控制器接收到收起指令后,控制电机291驱动丝杆292反转,从而驱动移动杆26从旋转叶片21的末端(即移动杆26在图4中的位置)朝中心转轴10径向移动至旋转叶片21的始端,在此过程中,第一连杆27拉动承载座22绕其与旋转叶片21的铰接处向下转动靠向旋转叶片21直至移入清洗腔中,与旋转叶片21叠合,与此同时,第一连杆27亦拉动第二连杆28向下移动,从而使得第二连杆28带动滑动座224移动,从而使滑动块223带动背拦杆25沿着导轨222反向滑动至另一端,如图6所示,此时,背拦杆25在餐具24背部拦住,从而把餐具24固定在餐具放置位上,然后再控制电动盖板关闭餐具取放窗口110。
[0034]
如图2所示,在本实施例中,中心转轴10是空心的,兼作供水主管路。洗碗机底部设有连通中心转轴10的水泵(图中未示出)。清洗腔的腔壁内侧设有连通水泵的喷头(图中未示出)。如图5所示,旋转叶片21中部沿径向设有径向供水支管路41,旋转叶片21的末端沿轴向设有轴向供水支管路42,该径向供水支管路41近端连通中心转轴10,远端连通轴向供水支管路42,轴向供水支管路42沿自身径向伸出有旋转出水管路43,旋转出水管路43可绕轴向供水支管路42转动,该旋转出水管路43装在承载座22底面,承载座22在底面为三个凸起部23开有对应的进水口231,旋转出水管路43通过进水管路44依次连通三个进水口231,凸起部23的侧壁上和顶壁上开有喷水孔(图中未示出)。上述水泵、中心转轴10、径向供水支管路41、轴向供水支管路42、旋转出水管路43和进水管路44作为供水机构。
[0035]
在餐具固定机构20收起后,用户则可在触控面板上点击清洗启动按钮,从而触发清洗启动指令。总控单元把清洗启动指令发送给滚筒式洗碗机100的控制器,控制器接收到该指令后,使旋转电机驱动中心转轴10旋转,启动水泵,为各个凸起部23以及位于清洗腔的腔壁上的喷头进行供水,使得:凸起部23通过其外表面的喷水孔对倒扣罩住该凸起部23的脏餐具24的内壁进行喷洗,喷头对脏餐具24外壁进行喷洗。本实施例是采用热水进行喷洗,利用热水来溶解污渍。在本实施例中,该洗碗机在对部分餐具固定机构20上的脏餐具24进行喷洗的同时,亦会对其他餐具固定机构20上的干净餐具进行喷洗。
[0036]
如图3所示,该滚筒式洗碗机100的清洗腔左、右两侧腔壁上各开有上、下两个容置槽120,容置槽120中设有消毒灯机构。如图8所示,消毒灯机构包括安装框35和隔板31,隔板31通过如图9所示的旋转轴34固定在安装框35中。隔板31的正面装有消毒灯30,安装框35中设有电机32,电机32连接曲柄结构33左端,曲柄结构33右端连接隔板31。在对餐具24进行喷洗的过程中,隔板31的正面朝清洗腔外,如图2所示,如此则消毒灯30朝清洗腔外且隔板31把消毒灯30与清洗腔隔开。如此,消毒灯30不会被水滴溅湿。在清洗好餐具24后,控制器控制电机32驱动曲柄结构33转动,从而驱动隔板31绕旋转轴34翻转直至其正面朝清洗腔内,如此则消毒灯30亦朝清洗腔内,如图3左侧的两个消毒灯机构所示状态。安装框35背面设有
作为位置感应器的到位行程开关(图中未示出),其位于隔板31翻转至正面朝清洗腔内的翻转路径上。若隔板31转动到位则会碰到该到位行程开关,则电机32停止驱动隔板31,此时,消毒灯30朝清洗腔内。若不需要对所有的餐具固定机构20上的餐具进行消毒,可以只驱动一侧的隔板31翻转从而使对应的消毒灯30朝清洗腔内,如图3所示,仅左侧的消毒灯30朝清洗腔内,而右侧的消毒灯30朝清洗腔外,然后由旋转电机驱动中心转轴10转动,使需要进行消毒的餐具固定机构20移动至朝清洗腔内的消毒灯30的位置处进行消毒。若需要对所有的餐具固定机构20上的餐具进行消毒,则使全部的消毒灯30朝清洗腔内,然后由旋转电机驱动中心转轴10转动,从而使各个餐具固定机构20上的餐具都能够被消毒灯30照射到。在对餐具24消毒完毕后,电机32驱动曲柄结构33反转,从而驱动隔板31反向翻转复位。安装框35正面设有复位行程开关36,该复位行程开关36位于隔板31反向翻转至正面朝清洗腔外的翻转路径上。若隔板31转动恢复至初始位置则会碰到该复位行程开关36,电机32则停止驱动隔板31。本实施例中,复位行程开关36和到位行程开关都是位置感应器。
[0037]
用户若需要取出洗干净的餐具24,则可在触控面板上点击餐具取出按钮,从而触发餐具取出指令。总控单元则向滚筒式洗碗机100的控制器发出餐具取出指令。控制器接收到餐具取出指令后,控制旋转电机驱动中心转轴10转动从而使得放置有干净餐具的餐具固定机构20转动至餐具取放窗口110处。电动盖板打开餐具取放窗口110,然后电机291驱动移动杆26径向移动从而带动承载座22向上转动直至其平置于餐具取放窗口110处,如图1所示,用户即可将餐具24取出。
[0038]
在本实施例中,控制器分别电连接旋转电机、电机291、电动盖板、摄像头、水泵、电机32、消毒灯30、到位行程开关和复位行程开关36。
[0039]
本实施例的承载座22和背拦杆25是联动的,本实施例通过承载座22的转动来带动背拦杆25沿导轨222移动至餐具24背面拦住。而在非优选的实施例中,可以取消承载座22和背拦杆25的这种联动,改为由用户手动推背拦杆25使其沿导轨222移动至餐具24背面拦住。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1