一种自动按压装置的制作方法
[0001]
本实用新型涉及清洗设备领域,特别涉及一种自动按压装置。
背景技术:
[0002]
在目前的公共卫生设施当中,常需要放置洗手液瓶,为使用者提供洗手液,传统的洗手液按压瓶需要通过手按压泵头将洗手液喷到手上,当使用人数增多时容易造成交叉感染,不利卫生;而采用感应式洗手液机又需要定期拆卸储存箱补充洗手液,给使用造成不便。
[0003]
为此,现有技术提出一种自动出液机,当感应到人手时通过升降气缸驱动升降板,下降指定距离并按压洗手液泵体,此种装置只能够适用特定尺寸的洗手液瓶,当洗手液瓶尺寸增大时,容易造成升降板下降距离过大,导致洗手液瓶被压坏。
技术实现要素:
[0004]
本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种自动按压装置,能够更好地适应不同尺寸的按压瓶。
[0005]
本实用新型第一方面的自动按压装置,包括:壳体,内部具有用于放置按压瓶的容纳腔;升降组件,设置在按压瓶上方,升降组件上设置有压力传感器;驱动装置,设置在壳体上并用于驱动升降组件升降,压力传感器用于检测升降组件和按压瓶的按压泵之间的压力。
[0006]
进一步地,升降组件上设置有红外传感器,红外传感器与驱动装置电连接。
[0007]
进一步地,驱动装置包括设置在壳体上的电机与丝杠,电机与丝杠驱动连接,升降组件上设置有螺母,丝杠与螺母螺纹配合。
[0008]
进一步地,壳体上设置有至少两个丝杠,驱动装置上设置有至少两个螺母,多个丝杠与多个螺母一一对应地螺纹配合。
[0009]
进一步地,电机驱动连接有主动齿轮,每个丝杠上均设置有从动齿轮,主动齿轮与多个从动齿轮啮合。
[0010]
进一步地,壳体上设置有轴承,丝杠通过轴承与壳体转动连接。
[0011]
进一步地,压力传感器连接有防滑垫,防滑垫能够下降至抵接按压泵,壳体上设置有距离传感器,距离传感器用于检测升降组件在上下方向上的位置。
[0012]
应用本实用新型的自动按压装置,在使用时,可以先将洗手液瓶放置在容纳腔中,然后控制驱动装置,控制升降组件下降,使得升降组件上设置的压力传感器抵接挤压瓶的按压泵,当压力传感器的检测值达到预定值时,即可控制驱动装置,使得升降组件停止下降;由于升降组件依靠按压泵的压力判断是否停止下降,在面对不同尺寸的挤压瓶时,都可以将升降组件下降到触发按压泵的合适位置,有效改善了现有技术当中升降组件容易压坏挤压瓶的情况,更好地适应了多种不同尺寸的挤压瓶。
[0013]
本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述
中变得明显,或通过本实用新型的实践了解到。
附图说明
[0014]
本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0015]
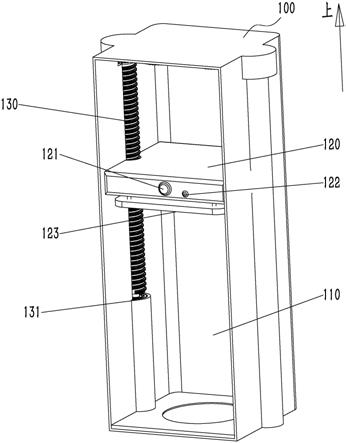
图1为本实用新型实施例的自动按压装置的轴侧图;
[0016]
图2为本实用新型实施例的自动按压装置另一视角的轴侧图;
[0017]
图3为本实用新型实施例中升降装置和驱动齿轮组的轴测图;
[0018]
图4为本实用新型实施例中升降组件的轴测图;
[0019]
上述附图包含以下附图标记。
[0020][0021]
具体实施方式
[0022]
下面详细描述本实用新型的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
[0023]
在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方
位构造和操作,因此不能理解为对本实用新型的限制。
[0024]
在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个及两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0025]
本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
[0026]
参照图1、图2,一种自动按压装置,包括:壳体100,内部具有用于放置按压瓶的容纳腔110;升降组件120,设置在按压瓶上方,升降组件120上设置有压力传感器;驱动装置,设置在壳体100上并用于驱动升降组件120升降;压力传感器用于检测升降组件120和按压瓶的按压泵之间的压力。
[0027]
应用本实施例的自动按压装置,在使用时,可以先将洗手液瓶放置在容纳腔110中,然后控制驱动装置,控制升降组件120下降,使得升降组件120上设置的压力传感器抵接挤压瓶的按压泵,当压力传感器的检测值达到预定值时,即可控制驱动装置,使得升降组件120停止下降;由于升降组件120依靠按压泵的压力判断是否停止下降,在面对不同尺寸的挤压瓶时,都可以将升降组件120下降到触发按压泵的合适位置,有效改善了现有技术当中升降组件120容易压坏挤压瓶的情况,更好地适应了多种不同尺寸的挤压瓶。
[0028]
其中,压力传感器可以通过多种方式检测升降组件120与按压泵抵接时的压力,例如在升降组件120上设置压缩弹簧,并在弹簧上设置位置传感器,当弹簧与按压泵抵接后,通过检测弹簧的压缩量即可检测按压泵对升降组件120的压力;还可以通过设置在升降组件120上的压阻式压力传感器、陶瓷压力传感器、扩散硅压力传感器以及压电式压力传感器等压力传感器,检测按压泵对升降组件120的压力。
[0029]
可以理解的是,驱动装置也可以通过多种方式驱动升降组件120升降,例如通过电机带动齿轮齿条、或者丝杠130螺母124等驱动机构,驱动升降组件120,此时电机与压力传感器电连接,当压力传感器的检测值大于预定值时,电机即可停止运转;也可以使用气缸或者液压缸驱动升降组件120,此时可以采用压力传感器与气缸的电磁阀电连接的方式,也可以采用压力传感器与机械装置联动的方式,当压力传感器的检测值达到预定值时,即可控制驱动装置停止运行。
[0030]
如图1、图4所示,为了避免多人使用造成的交叉感染,可以在升降组件120上设置红外传感器121,红外传感器121与驱动装置电连接,当红外传感器121被手遮挡时,红外传感器121能够将信号传递给驱动装置,此时驱动装置即可驱动升降组件120下降,实现无接触自动出液;在此,红外传感器121可以参考现有技术当中关于干手机以及洗手液机的相关设计,采用现有技术当中已有的红外传感器121。
[0031]
如图1至图3所示,驱动装置包括设置在壳体100上的电机与丝杠130,电机与丝杠130驱动连接,升降组件120上设置有螺母124,丝杠130与螺母124螺纹配合;此时丝杠130在电机的驱动下转动,使得螺母124带动升降组件120相对于丝杠130升降,由于丝杠130具有反向自锁性质,当压力传感器的检测值达到预定值时,电机停转,此时丝杠130停转,升降组件120能够立即与丝杠130锁死,停止下降,有效保证了升降组件120控制的精确性,避免电
机停转后升降组件120仍然继续下降,造成按压泵被压坏的情况发生;进一步地,由于丝杠130的传动减速比较大,在无需另外设置减速器的前提下,即可使得升降组件120的升降速度较慢,便于随时停止升降组件120的升降。
[0032]
如图1至图3,为了保证升降组件120升降时的稳定性,避免丝杠130承受较大的偏心压力导致变形,壳体100上设置有至少两个丝杠130,驱动装置上设置有至少两个螺母124,多个丝杠130与多个螺母124一一对应地螺纹配合;此时,通过多个丝杠130共同驱动升降组件120升降,不但保证了升降组件120升降的稳定性,还能够有效减小单根丝杠130承受的偏心力,有效防止丝杠130变形。
[0033]
如图1、图3所示,电机驱动连接有主动齿轮141,每个丝杠130上均设置有从动齿轮142,主动齿轮141与多个从动齿轮142啮合;此时,两根丝杠130在由主动齿轮141和从动齿轮142构成的驱动齿轮组140的带动下,能够同时同方向转动,避免发生两个丝杠130转动参数不一致,导致升降组件120发生变形。
[0034]
进一步地,为了便于布置丝杠130,可以在壳体100上设置轴承131,丝杠130通过轴承131与壳体100转动连接;具体地,可以在壳体100上设置多个轴承131,用于连接多根丝杠130。
[0035]
如图1、图4所示,压力传感器连接有防滑垫123,防滑垫123能够下降至抵接按压泵,壳体100上设置有距离传感器,距离传感器用于检测升降组件120在上下方向上的位置;其中,防滑垫123的设置可以防止在升降组件120下降过程中,对按压瓶施加偏心力,使得按压瓶倾倒影响使用;而距离传感器的使用,可以在更换不同尺寸的瓶体时,将升降组件120的位置调整到刚好抵接按压泵,使得后续的使用过程中升降组件120下降短暂距离即可触动挤压泵出液,然后恢复原位便于下一次出液,有效节约单次出液时升降组件120运动的时间。
[0036]
如图1、图2所示,为了指示整个装置的工作状态,可以在升降组件120上设置指示灯122。
[0037]
本实施例的第二方面,还给出了一种自动按压方法,运用上述自动按压装置,包括以下步骤:放置按压瓶,将按压瓶放置在容纳腔110中,使得按压瓶的按压头位于压力传感器下方;触动按压泵,控制驱动装置,驱动升降组件120下降,使得压力传感器抵接按压泵;停止出液,当压力传感器的检测值达到预定值时,控制驱动装置,驱动升降组件120停止下降。
[0038]
其中,触动按压泵的信号可以有多种来源,例如在壳体100或在按压组件上设置开关,通过触发开关使得整个自动按压装置执行上述步骤;当然,为了避免人手直接接触自动按压装置,减少交叉感染的可能,也可以在升降组件120上设置红外传感器121,当红外传感器121检测到人手后,即可控制整个自动按压装置自动执行上述步骤。
[0039]
在停止出液之后,为了便于下次出液,可以通过开关控制驱动装置,驱动升降组件120上升,也可以在压力传感器的检测值达到预定值后,直接控制丝杠130反转,使得升降组件120上升。
[0040]
可以理解的是,现有技术当中的按压泵内部均设置有弹性组件,故按压泵的反作用力随着按压泵下压而增加,因此可以根据按压泵的按下压力确定预定值的大小。
[0041]
本实施例第三方面,还给出了另一种自动按压方法,运用上述自动按压装置,包括
如下步骤:放置按压瓶,将按压瓶放置在容纳腔110中,使得按压瓶的按压头位于压力传感器下方;触动按压泵,控制驱动装置,驱动升降组件120下降,使得压力传感器抵接按压泵;记录位置,当压力传感器的检测值大于0时,控制驱动装置停止,并通过距离传感器记录此时升降组件120在上下方向上的位置a。
[0042]
当需要更换不同尺寸大小的按压瓶时,可以通过上述方法,使得升降组件120恰好运动至抵接按压泵但没有触发按压泵的位置,此时通过位置传感器记录该位置a,在之后的使用过程当中,每一次出液之后即可控制升降组件120回到a位置,可以有效节约单次出液时升降组件120的运动时间。
[0043]
应理解,位置传感器可以通过多种方式,检测升降组件120在上下方向上的位置,例如通过设置在壳体100上的光栅尺或者磁环距离传感器,直接检测升降组件120的位置,也可以通过设置在丝杠130或者电机上的编码器,通过检测丝杠130或者电机的转动位置,间接检测升降组件120的升降位置。
[0044]
其中,为了便于更换按压瓶,可以在升降组件120上设置复位按钮,当触发复位按钮时,升降组件120能够在驱动装置的驱动下上升至最高位置,将容纳腔110的空间扩展至最大,便于按压瓶的放置;而在按压瓶放置完成后,可以通过触发设置在升降组件120上的调节按钮,使得自动按压装置自动执行本实施例第三方面的方法,实现升降组件120位置的自动调整。
[0045]
在升降组件120的位置调整完成,即位置a被确定后,可以通过下述步骤正常执行出液操作:下降出液,当检测到出液信号后,控制驱动装置,驱动升降组件120从位置a开始下降;停止出液,当压力传感器的检测值达到预定值时,控制驱动装置,驱动升降组件120停止下降;恢复原位,控制驱动装置,驱动升降组件120上升至回到位置a。
[0046]
上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1