料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质与流程
[0001]
本发明涉及根据来自顾客的订单自动提供包括面条在内的料理的料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质。
背景技术:
[0002]
近年来,从餐馆中的员工不足等背景出发,具有想要使餐馆中的服务工序自动化的要求。在面条的制造系统中,也要求自动化,以往提出有如专利文献1~专利文献6那样的技术。
[0003]
在专利文献1中,公开了如下面食烹调装置:在由荞麦面制造机或乌冬面制造机制造的荞麦面或乌冬面放入到透水性收纳容器内的状态下,一边环状移动一边在煮水槽内烹煮,在下一工序的水接收槽体内环状移动并由冷热水面条处理装置进行处理,并且在下一工序中荞麦面或乌冬面被转移到出售容器中,进而,在下一工序中从冷汤供给装置向盛有荞麦面或乌冬面的出售容器中注入冷汤、或从热汤供给装置注入热汤,最后,将出售容器送出到取出口,由此提供热荞麦面、热乌冬面、冷荞麦面或冷乌冬面。
[0004]
在专利文献2中,公开了如下面类自动烹调装置:在煮面篓中放入了拉面的面条的状态下,通过在烹煮完成部中使煮面篓在锅中沿环状的路径移动来煮面条,在下一工序的由环状路径构成的完成部中,向容器供给拉面的汤,接着将面条从煮面篓放入到容器中,接着将叉烧肉等的配料放入容器中,接下来将作料放入容器中,最后从完成部将容器向自动配送输送机送出。
[0005]
在专利文献3中,公开了如下拉面、杂烩面等的自动烹调机:向输送机上直线移动的容器加入从生面条供给机供给并用热水在锅装置中煮过的面条,接着加入汤、配料、作料,最后容器被送出到受领台。
[0006]
在专利文献4中公开了如下日本荞麦面、乌冬面、中华荞麦面等的煮面的自动烹调装置:在输送机状的食品输送箱上放置餐具,向该餐具加入汤、接着加入在冰箱内预先放入密闭容器中的配料,接下来向烹调保温装置中加入预先放入密闭容器中并在加热装置中预先加热烹调的面条,最后,客人从商品取出口取出放入餐具中的商品。
[0007]
在专利文献5中,公开了一种意大利面烹调系统,其具备:烹调槽,其对意大利面进行烹煮;加热单元,其对槽内的水进行加热;加水单元,其向槽内添加水;高水位检测单元;以及控制单元,其对自动充满水并在意大利面烹调中将水位维持在高水位和最大溢流水位之间的高水位检测单元进行响应。
[0008]
在专利文献6中公开了一种通过具有高度分布测定部的臂来搅拌并混合烹调容器中的烹调材料的烹调辅助机器人。
[0009]
(现有技术文献)
[0010]
(专利文献)
[0011]
专利文献1:特公平7-24626号公报
[0012]
专利文献2:日本特开昭60-186259号公报
[0013]
专利文献3:日本特开平7-227354号公报
[0014]
专利文献4:日本特开2007-233995号公报
[0015]
专利文献5:日本特开平6-153839号公报
[0016]
专利文献6:日本专利第4531832号公报
技术实现要素:
[0017]
(发明所要解决的课题)
[0018]
在上述专利文献1所记载的面条烹调装置中,限定于烹煮荞麦面或乌冬面且仅注入冷汤或热汤的烹调,并没有进行煮过的面条或配料的加热烹调的装置,此外,没有具体公开荞麦面或乌冬面以外的面类的烹调。此外,在上述专利文献1所记载的面条烹调装置中,在各装置中,由于荞麦面、乌冬面、透水性收纳容器或出售容器分别沿环状的循环路线移动,所以各装置需要较大的设置面积。此外,在上述专利文献1所记载的面条烹调装置中,来自顾客的订单通过由面条烹调装置所具备的与出售的面类对应而设置有多个选择开关所选择的面类的受理卡来进行,商品的领取需要受理卡。
[0019]
在上述专利文献2所记载的面类自动烹调装置中,由煮拉面的工序和向拉面加入汤、叉烧肉等的配料或作料的工序构成,但是没有对煮过的面条或配料进行加热烹调的装置,此外,没有具体公开拉面以外的面类的烹调。此外,在上述专利文献2所记载的面类自动烹调装置中,在各装置中,由于拉面分别沿环状的循环路线移动,所以各装置需要较大的设置面积。此外,在上述专利文献2所记载的面类自动烹调装置中,没有公开来自顾客的订单的接受方法。
[0020]
在上述专利文献3所记载的自动烹调机中,没有对煮过的面条或配料进行加热烹调的装置,并且能够烹调的面类的种类有限,虽然例示了拉面和杂烩面,但是没有具体公开其配料的烹调。此外,在上述专利文献3所记载的自动烹调机中,由于向输送机上直线移动的容器依次投入食材,所以需要较大的设置面积。此外,在上述专利文献3所记载的自动烹调机中,没有公开来自顾客的订单的接受方法。
[0021]
在上述专利文献4所记载的自动烹调装置中,记载了对分别放入多个密闭容器中的面条一并进行加热烹调,但是并不是进行此后的面条的烹调或食材的烹调,并且能够烹调的面类的种类有限。此外,在上述专利文献4所记载的自动烹调装置中,由于向在输送机上直线移动的容器依次投入预先分别放入到密闭容器中的面条和配料,所以需要较大的设置面积、密闭容器的设置空间。此外,上述专利文献4所记载的自动烹调装置是自动售货机,向该自动售货机投入钱并提供出售指令。
[0022]
上述专利文献5所记载的意大利面烹调系统是一种使煮意大利面的作业省力化的系统,但是没有对煮过的面条或配料进行加热烹调的装置。此外,在上述专利文献5所记载的意大利面烹调系统中,没有公开来自顾客的订单的接受方法。
[0023]
在上述专利文献6所记载的烹调辅助机器人中,由于仅混合烹调容器中的烹调材料,所以不能使料理(菜肴)的烹调自动化。此外,在上述专利文献5所记载的烹调辅助机器人中,没有公开来自顾客的订单的接受方法。
[0024]
因此,本发明的目的在于,提供一种能够应用于各种料理且能够省空间化和自动
化的料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质。
[0025]
(解决问题所采用的措施)
[0026]
本发明的上述目的能够通过以下构成实现。即,本发明的第一方式的料理自动提供系统为能够根据顾客的订单而烹调多种料理的料理自动提供系统,其具有:
[0027]
可根据所述订单对面条进行加热的装置;
[0028]
加热装置,其用于加热烹调容器;
[0029]
供给器,其向所述烹调容器供给食材;以及
[0030]
移动装置,其能够使所述烹调容器移动,
[0031]
所述移动装置能够使所述烹调容器至少向从所述食材供给装置接收食材的供给的位置、利用所述加热装置而进行加热的位置、或者从所述面条加热装置接收加热烹调后的面条的位置移动,所述加热装置至少能够根据所述订单对从所述供给器供给到所述烹调容器的食材进行加热烹调。
[0032]
本发明的第二方式的料理自动提供系统在第一方式的料理自动提供系统的基础上,还具备以下的至少一个装置:
[0033]
(2-1)提供容器供给装置,保管提供容器并向盛入位置供给提供容器;
[0034]
(2-2)配餐装置,将盛入到提供容器的料理配送给顾客;
[0035]
(2-3)烹调容器清洗装置,用于清洗使用后的烹调容器;
[0036]
(2-4)提供容器清洗装置,用于清洗使用后的提供容器;
[0037]
(2-5)使用完提供容器输送装置,从顾客回收使用后的提供容器并向进行清洗的提供容器清洗装置输送所回收的提供容器;或者
[0038]
(2-6)清洗后提供容器输送装置,从用于清洗使用后的提供容器的提供容器清洗装置向保管提供容器并供给到向盛入位置供给所述提供容器的提供容器供给装置输送清洗后的提供容器;
[0039]
(2-7)面条供给装置,向能够加热面条的装置供给面条;
[0040]
(2-8)面条供给装置,从多种面条中向烹煮器供给与所述订单对应的面条;以及
[0041]
(2-9)非加热状态面条供给装置,向烹调容器供给不经由进行加热的装置的非加热状态的面条。
[0042]
本发明的第三方式的料理自动提供系统在第二方式的料理自动提供系统的基础上,以下单元中的至少一个为所述移动装置:
[0043]
向所述(2-1)的提供容器盛入料理的单元;
[0044]
将所述(2-3)的烹调容器输送至烹调容器清洗装置的单元;或者
[0045]
从烹调容器清洗装置取出所述(2-3)的烹调容器的单元。
[0046]
本发明的第四方式的料理自动提供系统在第二或第三方式的料理自动提供系统的基础上,以下装置中的至少任意两个可共用:所述(2-2)的配餐装置;所述(2-5)的使用完提供容器输送装置;或者所述(2-6)的清洗后提供容器输送装置。
[0047]
本发明的第五方式的料理自动提供系统在第一至第四中任一种方式的料理自动提供系统的基础上,所述移动装置能够使所述烹调容器至少向从所述供给器接收食材的供给的位置、利用所述加热装置而进行加热的位置、从所述面条加热装置接收加热烹调后的面条的位置、盛入装置的位置、或者清洗所述烹调容器的位置移动。
[0048]
本发明的第六方式的料理自动提供系统在第一至第五中任一种方式的料理自动提供系统的基础上,
[0049]
所述移动装置由多台移动式的烹调容器把持装置构成,
[0050]
所述烹调容器把持装置至少能够实现把持烹调容器而使所述烹调容器移动的动作以及调整烹调容器的姿态的动作,
[0051]
所述多台烹调容器把持装置能够协作而将多个烹调容器移动到所希望的位置。
[0052]
本发明的第七方式的料理自动提供系统在第一至第六中任一种方式的料理自动提供系统的基础上,所述面条加热装置和/或所述加热装置能够同时进行多个烹调。
[0053]
本发明的第八方式的料理自动提供系统在第一至第七中任一种方式的料理自动提供系统的基础上,
[0054]
具备向所述面条加热单元自动供给面条的面条供给装置,
[0055]
所述面条供给装置至少具备:
[0056]
面条保管单元,以所希望的温度保管面条;
[0057]
面条取出单元,从所述面条保管单元取出规定量的面条;以及
[0058]
面条输送单元,向面条加热单元的规定的位置输送所述面条取出单元所取出的面条。
[0059]
本发明的第九方式的料理自动提供系统在第一至第八中任一种方式的料理自动提供系统的基础上,所述面条供给装置根据顾客的订单而从多种面条中以规定的分量取出规定的面条,并向所述面条加热单元自动供给面条。
[0060]
本发明的第十方式的料理自动提供系统在第一~第九中任一种方式的料理自动提供系统的基础上,
[0061]
所述加热装置具备电磁式加热单元,
[0062]
并能够实现使烹调容器以规定的姿态旋转的同时进行加热,并且
[0063]
对烹调容器的食材进行搅拌。
[0064]
本发明的第十一方式的料理自动提供系统在第一至第十中任一种方式的料理自动提供系统的基础上,
[0065]
食材供给装置保管多种食材,并且
[0066]
根据顾客的订单从多种食材中将规定的食材以规定的分量自动供给到烹调容器。
[0067]
本发明的第十二方式的料理自动提供系统在第一~第十一中任一种方式的料理自动提供系统的基础上,其特征在于,
[0068]
顾客的订单能够通过以下至少一种方式接受:
[0069]
(12-1)接受对话形式的订单;
[0070]
(12-2)接受定制了菜单的订单;
[0071]
(12-3)接受来自无线通信终端的订单;
[0072]
(12-4)接受来自专用终端的订单;
[0073]
(12-5)通过语音识别接受订单;或者
[0074]
(12-6)通过图像识别接受订单。
[0075]
本发明的第十三方式的料理自动提供系统在第一至第十二中任一种方式的料理自动提供系统的基础上,能够进行面条料理以外的烹调。
[0076]
本发明的第十四方式的料理自动提供系统在第一至第十三中任一种方式的料理自动提供系统的基础上,还设置有其他烹调装置。
[0077]
本发明的第十五方式的餐馆,具备第一至第十四中任一种方式的料理自动提供系统。
[0078]
本发明的第十六方式的餐馆在第十五方式的餐馆的基础上,
[0079]
能够进行以下的至少一项:
[0080]
(16-1)自动掌握店内的空位状况;
[0081]
(16-2)即使从远程也能够由顾客确认空位;
[0082]
(16-3)即使从远程也能够由顾客预约座位;
[0083]
(16-4)即使从远程也能够由顾客订购菜单;
[0084]
(16-5)料理向顾客的提供自动化;
[0085]
(16-6)能够从顾客的终端结算费用;
[0086]
(16-7)配餐自动化;
[0087]
(16-8)使用后的提供容器的回收自动化;
[0088]
(16-9)使用后的提供容器的清洗自动化;
[0089]
(16-9)清洗后的提供容器的补充自动化;
[0090]
(16-10)使用后的烹调容器的清洗自动化;
[0091]
(16-11)顾客向店内的座位的引导自动化;
[0092]
(16-12)料理向顾客的提供自动化;
[0093]
(16-13)来自顾客的订单的预测自动化;
[0094]
(16-14)用于采购食材的订货自动化;或者
[0095]
(16-15)交付的食材自动补充到所述供给器。
[0096]
本发明的第十七方式的餐馆用自动系统,其根据来自顾客的订单而要提供的料理被烹调,
[0097]
能够进行以下的至少一项:
[0098]
(17-1)自动掌握店内的空位状况;
[0099]
(17-2)即使从远程也能够由顾客确认空位;
[0100]
(17-3)即使从远程也能够由顾客预约座位;
[0101]
(17-4)即使从远程也能够由顾客订购菜单;
[0102]
(17-5)料理向顾客的提供自动化;
[0103]
(17-6)能够从顾客的终端结算费用;
[0104]
(17-7)配餐自动化;
[0105]
(17-8)使用后的提供容器的回收自动化;
[0106]
(17-9)使用后的提供容器的清洗自动化;
[0107]
(17-9)清洗后的提供容器的补充自动化;
[0108]
(17-10)使用后的烹调容器的清洗自动化;
[0109]
(17-11)顾客向店内的座位的引导自动化;
[0110]
(17-12)料理向顾客的提供自动化;
[0111]
(17-13)来自顾客的订单的预测自动化;
[0112]
(17-14)用于采购食材的订货自动化;
[0113]
(17-15)交付的食材自动补充到所述供给器。
[0114]
本发明的第十八方式的第一至第十四中任一种方式中任一方式所述料理自动提供系统,至少具备面条供给装置、烹调容器移动装置、以及面条加热装置,
[0115]
所述面条供给装置向面条加热单元自动供给面条,具备:
[0116]
面条保管单元,以所希望的温度保管面条;
[0117]
面条取出单元,从所述面条保管单元取出规定量的面条;以及
[0118]
面条输送单元,向面条加热单元的规定的位置输送所述面条取出单元所取出的面条,并且
[0119]
所述面条供给装置根据顾客的订单而从多种面条中以规定的分量取出规定的面条,并向所述面条加热单元自动供给面条,
[0120]
所述烹调容器移动装置是至少具备一台移动式的烹调容器把持装置并使在外周设置有凸部的烹调容器移动的烹调容器移动装置,
[0121]
所述烹调容器把持装置能够实现把持烹调容器的所述凸部而使所述烹调容器移动的动作以及调整姿态的动作,并且
[0122]
所述面条加热装置是在盒内加热面条并将加热后的面条取出至容器的面条加热装置,而且进行以下的动作:
[0123]
在煮面篓内对面条进行加热的动作;
[0124]
提升放入有加热后的面条的煮面篓的动作;
[0125]
在与所述提升的煮面篓相比靠下方且与加热面条的位置相比靠上方的规定位置配置容器的动作;以及
[0126]
将所述提升的煮面篓倾斜而使煮面篓中的面条向容器移动的动作。
[0127]
本发明的第十九方式的面条自动供给装置是向面条加热单元自动供给面条的面条供给装置,其具备:
[0128]
面条保管单元,以所希望的温度保管面条;
[0129]
面条取出单元,从所述面条保管单元取出规定量的面条;以及
[0130]
面条输送单元,向面条加热单元的规定的位置输送所述面条取出单元所取出的面条。
[0131]
本发明的第二十方式的面条自动供给装置在第十九方式的面条自动供给装置的基础上,根据顾客的订单而从多种面条中以规定的分量取出规定的面条,并向所述面条加热单元自动供给面条。
[0132]
本发明的第二十一方式的烹调容器移动装置,至少具备一台移动式的烹调容器把持装置,使在外周设置有凸部的烹调容器移动,
[0133]
所述烹调容器把持装置能够实现把持烹调容器的所述凸部而使所述烹调容器移动的动作以及调整姿态的动作。
[0134]
本发明的第二十二方式的面条加热装置,进行以下的动作:
[0135]
在煮面篓内对面条进行加热的动作;
[0136]
提升放入有加热后的面条的煮面篓的动作;
[0137]
在与所述提升的煮面篓相比靠下方且与加热面条的位置相比靠上方的规定位置
配置容器的动作;以及
[0138]
将所述提升的盒倾斜而使煮面篓中的面条向容器移动的动作。
[0139]
本发明的第二十三方式的料理自动提供方法,具有:
[0140]
利用面条加热装置而根据所述订单对面条进行加热的步骤;
[0141]
利用加热装置而对烹调容器进行加热的步骤;
[0142]
利用食材供给装置而向所述烹调容器供给食材的步骤;以及
[0143]
利用移动装置而使所述烹调容器移动的步骤,
[0144]
所述移动装置能够使所述烹调容器至少向从所述食材供给装置接收食材的供给的位置、利用所述加热装置而进行加热的位置、或者从所述面条加热装置接收加热烹调后的面条的位置移动,
[0145]
所述加热装置至少能够根据所述订单对从所述供给器供给到所述烹调容器的食材进行加热烹调。
[0146]
本发明的第二十四方式的程序,由计算机执行第二十三方式的料理自动提供方法中至少一个步骤、单元。
[0147]
本发明的第二十五方式的存储介质,存储有第二十三方式的程序。
[0148]
(发明的效果)
[0149]
根据本发明的实施方式,可提供一种能够应用于各种料理且能够省空间化和自动化的料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质。
附图说明
[0150]
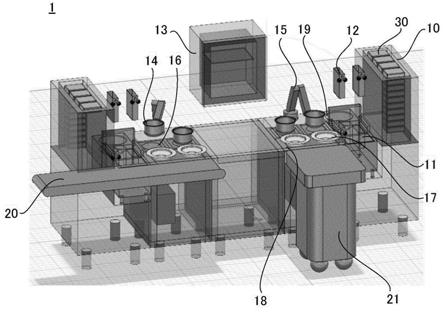
图1是第一实施方式的料理自动提供系统1的立体图。
[0151]
图2是从图1的另一角度观察的立体图。
[0152]
图3是从图1的又一角度观察的立体图。
[0153]
图4是第二实施方式的料理自动提供系统1的立体图。
[0154]
图5是从图4的另一个角度观察的立体图。
[0155]
图6是对图4的食材供给装置的外框等进行了透明处理的立体图。
[0156]
图7是说明基于餐具清洗机的餐具清洗的说明图。
[0157]
图8是图7的在餐后餐具拾取中的图像识别的说明图。
[0158]
图9是食材供给装置的概略图。
[0159]
图10是食材容器放置架用的滑动装置的说明图。
[0160]
图11是食材容器的说明图。
[0161]
图12是食材容器落下装置的立体图。
[0162]
图13是图12的各部件的俯视图。
[0163]
图14是图12的动作说明图。
[0164]
图15是食材容器滑动装置的立体图。
[0165]
图16是图15的动作说明图。
[0166]
图17是食材容器取出装置的立体图。
[0167]
图18是图17的俯视图。
具体实施方式
[0168]
下面,参照附图,对本发明的实施方式的料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质进行说明。但是,如下所示的实施方式例示用于实现本发明的技术思想的料理自动提供系统、餐馆、餐馆用自动系统、料理自动提供方法、程序及存储介质,本发明并不限定于此,也能够同样地适用于包含于权利要求书的其他实施方式。
[0169]
[第一实施方式]
[0170]
参照图1~图3,对本发明的第一实施方式的料理自动提供系统1进行说明。图1是第一实施方式的立体图。图2是从图1的另一角度观察的立体图。此外,图3是从图1的又一角度观察的立体图。
[0171]
本实施方式的料理自动提供系统1是可实现如下动作的系统:能够根据顾客的订单而供给食材和面条并烹调料理,将盛入到提供容器的料理提供给顾客,并且对提供容器、烹调容器进行清洗等。在本实施方式的料理自动提供系统1中,也能够应对多种面条,例如,意大利面、拉面、杂烩面、荞麦面、乌冬面、挂面、酱油煮挂面、凉面、山梨县乌冬面、扁面条、炒面等。例如,在意大利面的情况下,本实施方式的料理自动提供系统1能够烹调包括意大利实心面、意大利扁面条、蝴蝶面、千层面、通心粉、斜切短通心粉等各种各样的意大利面,此外,关于调味汁、汤、配料、烹调法等,也能够烹调多种料理。另外,如后所述,也能够烹调面条以外的料理。
[0172]
本实施方式的料理自动提供系统1由以下部件构成:面条供给装置10、烹煮器11、用于由烹煮器11煮面条的煮面篓12、食材供给装置13、能够由烹调容器14对食材、面条进行加热烹调的电磁烹调器16、作为移动装置的机械臂15、作为加热装置的电磁烹调器16、用于供给提供容器17的提供容器供给装置18、清洗烹调容器14的清洗机19、配餐输送机20、自动配餐机21、以及未图示的用于清洗提供容器17等的使用完的餐具的提供容器清洗机等。
[0173]
在本实施方式的料理自动提供系统1中,在图1的左右两侧以成为左右对称的配置方式设置有一对单元,该单元由一个面条供给装置10、具有两个煮面篓12的一个烹煮器11、两个电磁烹调器16、以及能够提供两个提供容器的提供容器供给装置18构成。两个单元能够共用一个食材供给装置13,但是本实施方式并不限定于此,也可以设置一对食材供给装置13。另外,在本实施例中,作为加热装置以电磁烹调器16为例进行说明,但是本实施方式并不限定于此,例如,也可以是气体烹调器、电热烹调器等。
[0174]
面条供给装置10从各种面条30的种类中保管多餐份的至少一种面条30,并且将面条30供给到煮面篓12。在面条供给装置10中面条30以按一餐份收拢的状态被保管,面条30按一餐份供给到煮面篓12。为了使面条30成为按一餐份收拢的状态,例如能够将面条供给装置10内设定为冷冻温度而能够保管冷冻状态的面条30。在这种情况下,使冷冻状态的面条30的形状与煮面篓12的形状匹配,据此容易向煮面篓12投入面条30。煮面篓12位于从面条供给装置10的面条供给位置时,在设置在面条供给装置10的面条供给导向件(省略图示)的作用下,从面条供给装置10的面条送出部送出的面条30以适当收容的状态投入到煮面篓12内。在此,例示了面条30为冷冻状态的情况,但是本实施例并不限定于此,例如,也可以是面条30为干面条的情况、生面条的情况等,此外,也可以设置将面条30预先按一餐份捆扎的单元、以及在将面条30投入到煮面篓12时从预先按一餐份捆扎的单元释放面条的单元。
[0175]
面条30按一餐份收拢,该一餐份的量可为通常的一人份的量,但是也能够预先设置大碗或小碗的量,在面条供给装置10中预先区分一餐份的量来进行保管,并且根据来自顾客的订单,取出规定量的面条30。此外,面条供给装置10预先区分多种面条来进行保管,并且能够根据来自顾客的订单,取出规定种类的面条30。
[0176]
煮面篓12具有在烹煮器11中面条能够与热水接触的透水性,没有特别限定材质,但是例如是金属制、树脂制或木制等。在图1中,煮面篓12的形状是有底四方柱状,但是本实施方式并不限定于此,例如也可以是有底圆柱状、有底角柱状。此外,在面条为冷冻面条的情况下,煮面篓12的形状优选为与冷冻面条的形状对应的形状,在图1中,从在面条供给装置10保管较多的面条的观点出发,将冷冻面条的形状作为例如长方体形状。
[0177]
煮面篓12构成为在烹煮器11中煮面条的下降位置和作为从面条供给装置10接收面条30的供给的高度位置的上升位置之间能够上下移动。另外,上升位置还可设置成向烹调容器14放入已煮的面条30的高度位置。煮面篓12能够在上升位置在大致水平方向上移动,能够在从面条供给装置10的面条供给位置、烹煮器11的上方的位置、以及在电磁烹调器16的上方向烹调容器14放入面条30的位置之间在大致水平方向上移动。虽然没有特别限定,但是在从面条供给装置10的面条供给位置、烹煮器11的上方的位置、以及在电磁烹调器16的上方向烹调容器14放入面条30的位置位于一条直线上的情况下,上方位置的煮面篓12的移动为大致平行移动。在此,说明了煮面篓12能够移动到承载于电磁烹调器16的状态的烹调容器14的上方位置,但是本实施例并不限定于此,例如,也可以代替使煮面篓12移动,在煮面篓12位于烹煮器11的上方位置的情况下,通过机械臂15使烹调容器14移动,并且在位于煮面篓12的下方的状态下向烹调容器14放入煮面篓12中的面条。在本实施方式中,作为移动装置例示了机械臂15(例如,多关节型机械臂、参照图1),但是本实施例并不限定于此,例如,也可以是沿轨道滑动的移动装置、具有能够伸缩的臂的移动装置、能够升降的移动装置、以及组合了多个致动器的移动装置等。
[0178]
为了从煮面篓12向烹调容器14放入面条30,例如,能够通过在烹调容器14的上方使煮面篓12的角度倾斜并使煮面篓12的敞开端向下,来使煮面篓12内的面条流入烹调容器14中。此外,例如,在能够开闭地控制煮面篓12的底部的情况下,也可以在烹调容器14的上方,以使煮面篓12的底部敞开的方式进行控制,由此将煮面篓12内的面条30放入烹调容器14中。在煮面篓12在大致水平方向上移动到提供容器17的上方的情况下,能够将煮面篓12内的面条30直接放入提供容器17中。
[0179]
在此,作为对面条进行加热的装置的一例,以烹煮器11为例进行了说明,但是在本实施方式中对面条进行加热的装置并不限定于烹煮器11,例如也可以是蒸煮器(省略图示)或炖煮器等。此外,烹煮器11的用途不仅是煮面条,例如也可以是煮蔬菜、煮水饺或煮各种食材。只要能够预先使煮面篓12移动到食材供给部13的食材供给口的部位,则煮面篓12能够按照顾客的订单从食材供给部13以规定量接收规定的食材,并且能够由烹煮器11以规定时间烹调该食材。此外,电磁烹调器16还可在面条以外的料理中使用。通过将烹调容器14放置于电磁烹调器16,除了面条以外,还能够进行炒菜、炖菜、烧烤、加热烹调等的各种烹调,能够提供各种料理。
[0180]
烹煮器11能够通过煮面篓12的上下移动来设定烹煮时间。烹煮时间根据面条的种类(意大利面、拉面、荞麦面、乌冬面等)、状态(冷冻、干面条、生面条等)、量(普通的一人份、
大碗、小碗等)而自动设定。在图1中描绘了烹煮器11同时容纳两个煮面篓12,但是该煮面篓12的数量没有特别限定,可以是仅一个,也可以是三个以上。在图1中,能够同时投入到烹煮器11的煮面篓12的数量设定为与电磁烹调器16的数量相同的两个。在本实施方式中,烹煮器11具有两个煮面篓容纳空间,两个煮面篓12能够容纳于烹煮器11的两个容纳空间中的任意一个。此外,两个煮面篓12能够独立地上下移动、水平方向移动。因此,能够根据来自顾客的订单,在适当的时机从面条供给装置10向煮面篓12供给面条30,并能够通过烹煮器11以预先设定的时间烹煮供给到煮面篓12的面条30。另外,根据顾客的订单来确定烹煮时间。例如,在意大利面的情况下,根据菜单(菜谱或烹调方法)调整烹煮时间。此外,烹煮器11自动调整热水的温度、热水的量等,此外,热水的更换时期根据烹调的状况、订单的状况、面条的种类、烹煮的料理的种类、烹调的量和频率等来自动管理,热水的更换作业也能够自动进行。
[0181]
与烹煮器11相邻地设置有两个电磁烹调器16,能够分别对烹调容器14进行加热。烹调容器14例如由有底圆筒状的煎锅构成。在食材供给装置13中保管有多种食材,能够向烹调容器14供给与顾客的订单对应的食材。在食材供给装置13中以适合于所保管的食材的温度条件(冷藏、冷冻、常温、保温)进行保管。在食材供给装置13中不仅保管有固体的食材,还保管有调味汁、汤、各种配料、调味料、作料等,根据顾客的订单,规定的食材以规定量供给到烹调容器14。在保管于食材供给装置13的食材中也包括用于准备的烹调的食材,这些准备通过另外配置的食材准备单元进行。例如,番茄酱的烹调、汤的炖煮烹调、切碎葱的烹调等的食材的准备能够分别通过自动烹调机进行,但是例如这些也可以通过手工进行、或将在其他场所准备的食材保管于食材供给装置13。在食材供给装置13设置有与食材对应的供给口,例如,如果食材为固体的配料,则将所计量的量从供给口供给到烹调容器14,此外,例如,在食材为调味汁、汤的情况下,在供给口设置有阀,将调味汁或汤以所计量的量从供给口供给到烹调容器14。
[0182]
在分别由自动烹调机进行番茄酱的烹调、汤的炖煮烹调、切碎葱的烹调等的食材的准备的情况下,对各食材、例如番茄、葱的形状、颜色进行图像识别,掌握食材的种类、状态,并且输送到用于进行适合于食材加工的加工单元。该输送时,需要通过与食材的种类、状态配合,并且例如把持各食材的适当的部位来进行拾取。食材的图像识别参照后述的实施方式。
[0183]
机械臂15的控制与食材供给装置13的控制联动,以使烹调容器14在机械臂15的作用下向与食材供给装置13的供给口对应的位置移动之后,将规定的食材以规定量向烹调容器14供给。从食材供给装置13接收到食材的供给的烹调容器14在机械臂的作用下向电磁烹调器16移动并进行加热烹调。例如,如果仅加热汤,则在电磁烹调器16的加热烹调过程中不需要对烹调容器14内的食材进行搅拌。
[0184]
另一方面,例如在将多种配料与调味汁、调味料一起炒制的情况下,需要在加热烹调过程中对烹调容器14内的食材进行搅拌。作为对烹调容器14内的食材进行搅拌的方法之一,例如有在电磁烹调器16之上使烹调容器14旋转的方法。在图1中,电磁烹调器16的烹调容器14的承载面记载为平面上,但是本实施例并不限定于此,例如也能够将电磁烹调器16的烹调容器14的承载面设置为与烹调容器14的形状匹配的凹部。例如,能够在该凹部将烹调容器14以规定的角度倾斜承载并在该凹部内利用电动机等对烹调容器14进行旋转驱动
而对烹调容器14中的食材进行搅拌(在这种情况下,烹调容器14进行旋转轴朝向规定方向倾斜的旋转运动)。此外,例如,还可以利用机械臂15抓住锅铲(省略图示)并控制机械臂而用该锅铲对电磁烹调器16上的烹调容器14中的食材进行搅拌。
[0185]
在提供容器供给装置18保管有多个提供容器17,图1中能够将各两个提供容器17提供到与电磁烹调器16相邻的位置。利用机械臂15抓住烹调容器14并在提供容器17之上倾斜而能够将在烹调容器14内所烹调的料理盛入到提供容器17中。另外,本实施方式的盛入方法并不限定于此,例如,能够用机械臂15把持料理捞起用具,并利用该料理捞起用具将烹调容器14内的料理盛入到提供容器17中。使用后的烹调容器14被机械臂15运送到清洗机19并进行清洗。清洗后的烹调容器14被机械臂15取出而用于下一道料理。
[0186]
在机械臂15能够抓住提供容器17并移动的情况下,能够将保管于食材供给装置13中的食材直接放入提供容器17中。例如,能够向提供容器17中直接注入保管于食材供给装置13的汤或盛入配料、浇头、作料等的食材。
[0187]
如果接受来自顾客的订单,则从面条供给装置10向煮面篓12内投入面条30,由烹煮器11烹煮规定时间。另一方面,从提供容器供给装置18向烹调容器14供给规定量的规定的食材,利用电磁烹调器16加热料理。此时,以面条的烹煮完成时间与电磁烹调器16的食材的加热烹调完成且接收面条的准备已完成的时间相关联的方式进行控制,能够与在烹调容器14内的加热料理的进展配合而将刚好烹煮完成的面条投入到烹调容器14中。此外,具有两个煮面篓有两组、且具有两个电磁烹调器16的单元有两组,从而能够利用共计四个煮面篓和四个电磁烹调器,因此能够并列进行四个料理。只是,图1中,在各单元中机械臂15为一台、面条供给装置10为一个、清洗机19为一个,此外,食材供给装置13在两个单元中共用一个,此外,还需要考虑两个煮面篓12的移动路径,因此协调控制各部分,调整优先顺序、控制的顺序,控制成所有的料理的进展适当地进行。例如,在意大利面料理的情况下,为了有嚼劲地烹煮完成,重要的是面条的烹煮时间和从将面条烹煮完成到由电磁烹调器16在烹调容器14内混合调味汁和意大利面的加热料理时间,因此以能够适当地管理这些时间的方式确定优先顺序、序列,例如,在两个电磁烹调器16的加热料理结束时间重叠的情况下,考虑到机械臂15将烹调后的意大利面盛入到提供容器17为止的时间,进行将投入到两个煮面篓12的意大利面的烹煮开始时间错开等的控制。另外,也可以增加机械臂15的数量、增加同时放入到烹煮器11的煮面篓12的数量、设置多个煮面篓12能够同时移动的移动路径、增加清洗机19的数量、增加食材供给装置的数量、能够同时从面条供给装置10向多个煮面篓12投入面条、以及设置多个自动配餐机21,但是需要考虑配置空间、系统1的成本等的问题。
[0188]
基于电磁烹调器16的加热料理不限于同时投入所有的配料,能够根据烹调菜单,先对加热时间长的食材进行加热,此后,投入加热时间短的食材。例如,在菜单为意大利面的情况下,例如利用电磁烹调器16对从食材供给装置13供给到烹调容器14的食材和意大利面调味汁进行炒制,接着,将由烹煮器11煮过的意大利面(面条30)投入到烹调容器14,使配料和意大利面调味汁与意大利面混合并盛入到提供容器17,并且根据需求,从食材供给装置13供给浇头而完成意大利面料理。在荞麦面、乌冬面的情况下,例如,将烹煮完成的面条30放入提供容器17中,接着,向提供容器17中加入由电磁烹调器16加热的汁、来自食材供给装置13的温的汁,最后,从食材供给装置13放置配料、浇头、作料等的食材后完成。在拉面的情况下,例如,向提供容器17注入由电磁烹调器16进行了加热烹调的汤、从食材供给装置13
供给的温的汤,向其中加入由烹煮器11烹煮完成的面条30,最后,从食材供给装置13放置配料、浇头、作料等的食材后完成。
[0189]
配餐输送机20和自动配餐机21能够将盛入到提供容器17的料理配送到接受了订单的顾客的位置。例如,配餐输送机20能够从提供容器供给装置接收盛入了料理的提供容器,并且将该料理配送到订购了该料理的顾客所在的配餐柜台,此外,也可以将该料理从配餐输送机20交付其他自动配餐机(省略图示),该自动配餐机将该料理配送到订购了该料理的顾客的位置。此外,例如自动配餐机21是自行行进式的自动配餐机,因此能够从提供容器供给装置接收盛入了料理的提供容器,并且将该料理配送到订购了该料理的顾客所在的位置。在向顾客配送料理的情况下,不仅能够提供料理,还能够提供筷子、汤勺、羹勺、餐叉、餐刀、湿巾、餐巾等,这些的提供的时机不限于与料理同时提供,也可以是顾客进店并就坐的时机等。
[0190]
本实施方式的料理自动提供系统具备接受来自顾客的订单的单元(省略图示)。接受来自顾客的订单的单元例如能够接受以对话形式的订单、接受定制了菜单的订单、接受来自无线通信终端的订单、接受来自专用终端的订单、通过语音识别接受订单、通过图像识别接受订单等。这些选择可在便携终端上以对话形式进行,还可参考帮助画面,因此能够由顾客容易地选择、输入。例如,能够接受顾客喜好的定制的订单。还能够将顾客的过去的订单存储于系统而在订购时向顾客提示顾客特有的菜单、受欢迎的菜单等。例如,还可以将由特定的顾客定制的菜单作为推荐菜单、常规菜单来提供。
[0191]
顾客能够从便携终端通过无线通信进行订购,所以也能够从远离系统的场所、例如从店铺外进行订购。在从远程地点进行订购的情况下,能够预先输入实际到达店铺的时刻,此外,到达店铺时通过简单的操作或例如通过地理围栏自动判别顾客的位置来提供料理。
[0192]
作为在系统1前进行订购的方法还有不使用便携终端16的方法。例如,在系统1上预先设置规定的订单受理单元(省略图示),能够通过语音识别来识别基于顾客的声音的订单。如果接受订单,则进行“顾客编号是〇〇号。现在正在制作,请稍等。”等的语音引导、文字显示,向顾客通知顾客编号,并且按照订单烹调料理,能够向位于通过配餐输送机20运送料理的柜台前的订购了该料理的顾客提供该料理。此外,通过显示该料理的顾客编号,来顾客能够识别自己所订购的料理。此外,例如还能够在提供容器17上预先设置贴附识别编号的装置。或者,还能够通过自动配餐机21将所订购的料理配送到顾客所在的座位。
[0193]
在提供容器17附加有顾客的识别编号。例如,该识别编号也包含条形码等。自动配餐机21包括条形码读取器,从附在饮料的容器上的条形码掌握配餐目的地的顾客的信息。由于顾客持有便携终端,所以饮料自动提供系统能够掌握店内的顾客的位置信息。由此,饮料配送装置能够根据附在饮料的容器上的顾客信息,掌握送达目的地的顾客的桌子的位置。在此,例示了使用条形码读取器,但是本实施例并不限定于此,例如,也能够构成为从系统1向自动配餐机21发送所配送的料理的数据。
[0194]
自动配餐机21例如是能够在店内自行行进的自动输送装置,通过设置于店内的地板上的导向图案或饮料配送装置所具有的位置信息单元的引导,来能够将料理配送到作为目标的顾客的桌子。此外,自动配餐机21也能够回收顾客的使用完的容器,并且将使用完的提供容器17输送至提供容器清洗机(省略图示)。例如,如果自动配餐机21包括图像识别装
置和机械臂,则能够识别顾客的使用完的容器并通过机械臂回收容器。另外,优选地,回收使用完的容器时,向顾客进行请求允许回收容器的询问,在顾客允许的情况下,在进行了回收容器的通知的基础上回收容器。此外,不仅从顾客处回收使用完的提供容器17,还可回收筷子、汤勺、羹勺、餐叉、餐刀、湿巾、餐巾等。所回收的筷子、汤勺、羹勺、餐叉、餐刀等由提供容器清洗机或其他的清洗装置进行清洗和干燥,并且直到提供给下一位顾客为止保管于规定的保管单元。湿巾、餐巾等由洗涤单元进行洗涤和干燥,并且直到提供给下一位顾客为止保管于规定的保管单元。除了料理以外,关于筷子、汤勺、羹勺、餐叉、餐刀、湿巾、餐巾等的提供、回收、清洗、洗涤等,也可使用自动配餐机21等而实现自动化。
[0195]
此外,自动配餐机21即使不使用便携终端,也能够接受来自顾客的订单。例如,在自动配餐机21上预先设置规定的订单受理单元,能够通过语音识别来识别基于顾客的声音的订单。如果接受订单,则进行“顾客编号是〇〇号。现在正在制作,请稍等。”等的语音引导、文字显示,向顾客通知顾客编号,并且将订单内容发送到系统1。在系统1中,按照订单烹调料理,自动配餐机21将料理配送到顾客的座位。
[0196]
自动配餐机21所回收的使用完的提供容器17或从顾客处接收使用完的提供容器17的装置(省略图示)回收的提供容器17由提供容器清洗装置(省略图示)进行清洗和干燥,清洗后的提供容器17由自动配餐机21运送到提供容器供给装置18并进行保管。另外,在本实施方式中说明了使料理自动提供系统1的所有工序自动化的方式,但是本实施方式并不限定于此,例如,也能够手动进行完成盛入而添加浇头食材的作业、手动进行料理的配送、手动进行订单的接受等。
[0197]
[第二实施方式]
[0198]
参照图4~图6,说明本发明的第二实施方式的料理自动提供系统1。图4是本实施方式的料理自动提供系统1的立体图。图5是从图4的另一个角度观察的立体图。
[0199]
与第一实施方式同样地,本实施方式的料理自动提供系统1能够根据顾客的订单,供给食材和面条并烹调料理,将盛入到提供容器的料理提供给顾客,并且对提供容器、烹调容器进行清洗等,自动控制、调整系统的各装置。在本实施方式的料理自动提供系统1中,与第一实施方式同样地,也能够应对多种面条、例如意大利面、拉面、杂烩面、荞麦面、乌冬面、挂面、酱油煮挂面、凉面、山梨县乌冬面、扁面条、炒面等。例如在意大利面的情况下,本实施方式的料理自动提供系统1能够烹调包括意大利实心面、意大利扁面条、蝴蝶面、千层面、通心粉、斜切短通心粉等的各种意大利面,此外,关于调味汁、汤、配料、烹调法等,也能够烹调多种料理。另外,如后所述,也能够烹调面条以外的料理。
[0200]
本实施方式的料理自动提供系统1从图4的左侧依次具备:面条供给装置10、烹煮器11、清洗烹调容器14的清洗机19、能够由烹调容器14对食材、面条进行加热烹调的加热烹调装置41、烹调容器待机部42、向烹调容器14供给肉、蔬菜、调味汁、调味料等的食材的食材供给装置13、向提供容器17盛入烹调后的料理的盛入装置43、以及提供容器供给装置18,该提供容器供给装置18储存提供容器17并将必要种类的提供容器17供给到盛入装置43的盛入位置。此外,料理自动提供系统1具备烹调容器把持装置40,该烹调容器把持装置40在面条供给装置10、烹煮器11、清洗机19、加热烹调装置41、烹调容器待机部42、食材供给装置13和盛入装置43之间把持烹调容器14并使其移动,并且调整姿态。
[0201]
面条供给装置10是储存面条并以规定的分量供给与订单对应的种类的面条的装
置。面条供给装置10也能够储存生面条、干面条、冷冻面条等的任何种类的面条,为了设定与面条的种类对应的温度、湿度等的条件,具备温度、湿度调整单元。例如,在储存冷冻面条的情况下,在面条供给装置10中包括将温度调整到冷冻温度区域的温度控制单元。面条供给装置10能够储存多种面条,并且能够调整取出的量,能够根据顾客的订单以所希望的分量供给所希望的种类的面条。例如,在意大利面的情况下,面条供给装置10能够储存意大利实心面、意大利扁面条、蝴蝶面、千层面、通心粉、斜切短通心粉等的各种种类。
[0202]
此外,关于分量,能够应对普通碗、小碗、大碗、特大碗等的多种分量。例如在冷冻面条的情况下,能够准备普通分量的面条和半分量的面条,在普通碗中提供一个普通分量的面条,在小碗中提供一个半分量的面条,在大碗中提供一个普通分量的面条和一个半分量的面条,在特大碗中提供两个普通分量的面条。另外,由于烹煮器11的容量的关系,作为一次烹煮量而言,在特大碗的分量过多的情况下,面条供给装置10也能够将普通分量的面条向烹煮器11分两次提供,在烹煮器中分两次烹煮普通分量的面条,将这个分两次烹煮完成的面条作为一餐份的特大分量的面条供给到烹调容器14。此外,对于一餐份的冷冻面条的分量除了普通分量面条、半分量面条以外,还能够增加面条分量的种类而提供大分量面条甚至特大分量面条等。
[0203]
在面条供给装置中储存多层面条,并在各层中排列成多列而储存面条。所储存的面条以每列顺序按一餐份逐一送出到面条导向部31。图5中例示了具有六层储存空间的面条供给装置,例如从六层储存空间的最上层依次供给面条,如果最上层的面条用完,则以第二层、接着第三层依次供给面条。在各层中,例如从多列的最右侧的列且各列的最靠前侧(最靠近面条导向部31一侧)按一餐份逐一向面条导向部31送出面条。送出到面条导向部31的面条沿面条导向部31的倾斜面滑下并承载于面条接收部32。面条接收部32可升降,去往供给面条的层的面条导向部31的位置来接收面条。
[0204]
承载有面条的面条接收部32在升降单元34的作用下进行升降,由此使面条接收部32移动到面条供给部33的位置。在面条供给部33的位置处,面条接收部32调整姿态以向供给部33送出面条。即,面条接收部32在与面条供给部33对应的高度在水平方向上旋转,在面条接收部32的导向件部对准供给面条的面条供给部的位置的基础上,将面条接收部32的铅垂方向上的角度调整成向下方倾斜,由此面条接收部32的导向件与设置于面条供给部33的倾斜部进行对位,面条沿该倾斜部滑动,投入到烹煮器11的煮面篓12内。在图5的例子中,准备了两个煮面篓12,面条供给部33也在与各煮面篓对应的位置设置有两个。
[0205]
在烹煮器11中,以与来自顾客的订单对应的烹煮时间来煮面条,煮完的面条转移到预先对配料和调味汁进行了加热烹调的烹调容器14中。如果面条烹煮完成,则煮面篓12被向上方提升。在烹调容器把持装置40的作用下烹调容器14定位于被提升的煮面篓的下方且比加热面条的位置靠上方的、烹煮器11的大致中央的位置。接着,被提升的煮面篓12倾斜而煮面篓12中的面条转移到烹调容器14中。此时,烹调容器14接收面条的位置配合而调整煮面篓12被提升的位置。
[0206]
与面条烹煮完成的时期配合,在烹调容器14中预先进行食材和调味汁的加热烹调。清洗机19所清洗的烹调容器14在烹调容器把持装置40作用下在食材供给装置13内移动,并且与来自顾客的订单对应而从食材供给装置13供给多种食材和调味汁。在食品供给装置13中以适当的温度和/或湿度条件保管有多种食材、多种调味汁及多种调味料等。例
如,食品供给装置13具备冷藏装置。烹调容器14在烹调容器把持装置40的作用下定位于食材供给装置13内的规定的食材、调味汁的供给位置,并且接收规定的食材、调味汁。
[0207]
接收了规定的食材、调味汁的烹调容器14在烹调容器把持装置40的作用下运送到加热容器待机部42,或者,在加热烹调装置41空闲且不需要等待面条的烹煮完成时间的情况下,直接运送到加热烹调装置41的烹调容器接纳位置。加热烹调装置41在本实施方式中设置有两个。在加热烹调装置41不空闲的情况下、在到加热烹调开始时间为止有时间且需要等待面条的烹煮完成时间的情况下、在多台烹调容器把持装置40之间交接烹调容器14的情况下,烹调容器14在烹调容器待机部42中暂时待机或临时放置。例如,本实施方式的两台烹调容器把持装置40分别确定了能够自行行进的范围,因此根据使烹调容器14移动的位置,有时在烹调容器把持装置40之间产生需要交接烹调容器14的情况。在这种情况下,一方的烹调容器把持装置40能够暂时将烹调容器14临时放置于烹调容器待机部42,另一方的烹调容器把持装置40能够拾取所放置的烹调容器14。另外,也可以重叠地设定烹调容器把持装置40之间能够自行行进的范围。开始加热烹调的时间、加热烹调中的加热时间、加热料理的加热的强度等可根据顾客的订单自动调整。
[0208]
在加热烹调装置41中,烹调容器14以从铅垂向上的朝向倾斜了规定角度的姿态的状态旋转的同时,被加热单元、例如电磁加热单元加热。通过使烹调容器14旋转的同时进行加热,来能够对食材均匀地进行加热,并且能够适当地混合食材和调味汁。
[0209]
由加热烹调装置41进行了加热烹调的烹调容器14在烹调容器把持装置40的作用下运送到烹煮器11的面条接纳位置,并投入烹煮完成的面条。投入有面条的烹调容器14在烹调容器把持装置40的作用下再次运送到加热烹调装置41,烹调容器14在旋转的同时被加热,由此对烹煮完成的面条进行加热的同时与食材和调味汁混合。
[0210]
如果规定时间的加热烹调结束,则烹调容器14在烹调容器把持装置40作用下运送到位于食材供给装置13的端部的盛入装置43。在盛入装置43的规定位置通过提供容器供给装置18在盛入装置43的盛入位置准备提供容器17。盛入装置43使烹调容器14相对于提供容器17以规定的角度倾斜,由此能够将烹调后的料理盛入到提供容器17中。盛入后的提供容器17例如在自动配餐机21等(参照图1)的作用下提供给顾客。另外,自动配餐机21等的动作与第一实施方式相同,因此省略说明。在本实施方式中,盛入装置43设置有两组,提供容器供给装置18也能够与两组盛入装置43的盛入位置对应而分别供给提供容器17。
[0211]
在对多个食材进行加热烹调的情况下,有时加热时间不同,在这种情况下,例如,能够先将加热时间长的食材投入到烹调容器14中并由加热烹调装置41进行规定时间的加热烹调,此后,将加热时间短的食材从食材供给装置13加入到烹调容器14中,进一步进行规定时间的加热烹调。此外,可以在将面条加入到烹调容器14中之后,从食材供给装置13接收食材的供给。根据来自顾客的订单并根据必要的食材等自动地计划加热烹调的时间、顺序等。
[0212]
此外,在加热烹调装置41中烹调的烹调容器14在烹调容器把持装置40的作用下向盛入装置43运送的中途,在食材供给装置中通过,但在该食材供给装置中通过时,也能够从食材供给装置向烹调容器14的料理追加浇头食材。在追加浇头食材的情况下,烹调容器把持装置40使烹调容器14移动到食材供给装置13的浇头食材追加位置。
[0213]
在利用盛入装置43料理盛入结束后,烹调容器14在烹调容器把持装置40的作用下
运送到清洗装置19。在本实施例中,清洗装置19设置有两个。如果在清洗装置19内使用完的烹调容器14以容纳面向下的姿态安放,则清洗装置19的盖关闭,在清洗装置19内利用从旋转喷嘴喷出的清洗水对烹调容器14进行清洗,此外,利用从旋转喷嘴的喷出的漂洗用水进行烹调容器14的漂洗,此外,根据需求进行烹调容器14的干燥。
[0214]
烹调容器14的干燥方式能够根据清洗装置19的运转方式进行各种选择。例如,在温水清洗的情况下,能够使烹调容器14自然干燥。此外,根据需求,也可以通过吹出空气而吹散水分来除去水分。此外,例如也可以使用冷风或暖风进行干燥。
[0215]
烹调容器14具备多个,例如,能够同时使用四个烹调容器14进行烹调。烹调容器把持装置40能够通过一对可动式的把持爪46把持和释放在烹调容器14的外周沿着整周设置的凸缘部45。烹调容器把持装置40能够如后所述沿轨道48(参照图6)自行行进并能够在水平方向上旋转,此外,具备位置/姿态调整部47,由于把持爪46设置于位置/姿态调整部47,所以把持爪46能够在把持烹调容器14的状态下调整烹调容器14的位置和姿态。例如,烹调容器把持装置40能够使烹调容器14移动、改变朝向、升降、调整烹调容器14的姿态以便配置于加热烹调装置41。
[0216]
图6是为了说明食材供给装置的内部而对食材供给装置的外框等进行了透明处理的立体图。图6a是烹调容器把持装置40将烹调容器14输送到烹调容器待机部42的附近时的局部立体图。图6b是烹调容器把持装置40将烹调容器14输送到盛入装置43的附近时的局部立体图。由于在烹调容器14的外周沿着整周设置有凸缘部45,所以烹调容器把持装置40通过把持爪46在凸缘部45的整周上可把持任何部分,因此能够简化烹调容器把持装置40把持烹调容器14时的定位控制。凸缘部45的剖面例如可为l形,能够作为由把持爪46容易把持的形状。在凸缘部45的内侧由烹调容器14的外周和l形的凸缘沿着烹调容器14的外周一周形成有朝下敞开的
コ
形的空间。此外,通过在该
コ
形的空间的上部面部分设置多个孔部而能够在清洗装置19中的清洗时排出滞留在
コ
形空间的清洗水。
[0217]
烹调容器把持装置40构成为能够在行驶单元49的作用下沿着轨道48行驶。行驶单元49是如环抱轨道48的周围的电动的驱动单元。在本实施方式中,对于一根轨道48设置有两个烹调容器把持装置40,两个烹调容器把持装置40协作来处理多个烹调容器14。虽然两个烹调容器把持装置40分别确定了可动范围,但是如上所述,该可动范围可以是重叠的范围。
[0218]
在本实施方式中例示的各装置的数量、配置只不过是示例,并不限定本实施方式,各装置的数量例如并不限定于两个,可以是一个,也可以是三个以上。烹调容器14的数量也不限定于四个,只要是一个以上即可,也可以是五个以上。此外,本实施方式说明了使料理自动提供系统1的所有工序自动化,但是本实施方式并不限定于此,例如,能够手动进行盛入装置43、提供容器供给装置18的一部分或全部。例如,手动调整通过盛入装置43盛入到提供容器17的料理的盛入,此外例如手动进行将提供容器17配置在规定的位置,此外,或者例如作为完成阶段手动进行调整盛入、加入浇头,此外,例如也能够手动进行料理向顾客的配送,并且手动接受来自顾客的订单等。
[0219]
在使用多个例如四个烹调容器14的系统中,能够同时并行地烹调多个订购的料理。在这种情况下,能够进行同时烹调来自顾客的多个订单的料理的处理。从食材供给装置13向哪个烹调容器14供给何种食材、以何种顺序通过加热料理装置以何种温度强度加热何
种程度的时间、以及通过烹煮器11烹煮完成如订单所示的面条的种类和量的时机、通过加热料理装置加热的时机等的、用于同时烹调多种料理的序列是料理自动提供系统1的控制单元自动计算,料理自动提供系统1的各装置按照所计算出的序列自动进行协调的控制。
[0220]
[第三实施方式]
[0221]
对本发明的第三实施方式的料理自动提供系统1进行说明。虽然在第一实施方式的图1~图3和第二实施方式的图4~图6中未图示,但是本实施方式的料理自动提供系统1除了烹煮器11、电磁烹调器16、加热烹调装置41以外,还具备:烧烤器、煎炸器、蒸煮器、炖煮器、加压烹调器、冷却器、烤箱、烤架、微波炉以及电饭锅等,除了面条料理以外,还能够自动提供多种多样的料理。此外,通过与饮料自动提供系统组合,能够自动调制包括酒精饮料、热饮、冷饮等的饮料,并且能够注入到容器中并自动提供给顾客。能够通过与所述使用完的提供容器17的回收相同的单元,使使用完的容器等的餐具的回收、清洗也自动化。
[0222]
[第四实施方式]
[0223]
对本发明的第四实施方式的自动餐馆进行说明。本实施方式的自动餐馆具备第一至第三实施方式中的至少任一个料理自动提供系统1,能够根据来自顾客的便携终端等的订单,接受料理的订单,自动通过按照订单的菜谱和烹调方法来烹调料理,并且将料理配送给顾客。此外,本实施方式的自动餐馆能够实现:自动掌握店内的空位状况;即使从远程也能够由顾客确认空位;即使从远程也能够由顾客预约座位;即使从远程也能够由顾客订购菜单;向顾客的料理的提供自动化;能够从顾客的终端结算费用;配餐自动化;使用完的提供容器的回收自动化;使用完的提供容器的清洗自动化;清洗完的提供容器的补充自动化;使用完的烹调容器的清洗自动化;向店内的座位的引导顾客的自动化;料理向顾客的提供自动化;来自顾客的订单的预测自动化;用于采购食材的订货自动化;交付的食材自动补充到所述供给器等。
[0224]
关于自动掌握店内的空位状况的单元,作为一例对使用了拍摄装置的例子进行说明。在店内设置有照相机等的拍摄装置,拍摄店内的客人座位的情况。通过对所拍摄的图像进行图像识别,能够自动且实时地掌握店内的空位状况。由此,能够自动判别店内的空位并将空位信息反映到预约系统。通过利用该预约系统,顾客也能够实时地确认店铺的空位并预约所希望的座位,并且,能够在预约座位的同时,一并进行料理的订购。此外,能够与预约时间配合来调整料理的提供时期,因此能够在进店后的适当时机向顾客提供订购的料理。另外,作为拍摄单元能够使用黑白照相机、彩色照相机、红外线照相机、摄像机等的适当的单元。此外,不仅能够通过基于动态图像的图像识别,也能够通过以规定间隔对静止图像进行图像识别来判断空位。此外,通过图像识别对提供给顾客的料理进行解析,由此能够掌握顾客正在以何种进度进餐。因此,料理自动提供系统1能够与顾客的进餐的进度配合来提供料理,并且能够经由便携终端,推荐追加的料理(包括甜点、饮品)的订单。
[0225]
也能够使进店的顾客向座位的引导自动化。在顾客预约了座位的情况下,通过出示预约时发行的预约编号、顾客代码等,例如通过将登录在顾客的便携终端的条形码、二维条形码等对准位于店铺入口的读取装置、或者例如基于来自顾客的便携终端的近距离无线通信等的通信进行的id码的认证等,系统1识别顾客。接着,通过顾客的便携终端或店铺的显示装置,来显示顾客的预约的座位,因此顾客能够自己识别预约的座位。此外,也能够使用自动配餐机21将顾客引导到预约的座位。
[0226]
在顾客没有进行预约的情况下,顾客通过便携终端在店铺的入口通过无线通信向系统1通知来到店铺、或者通过来自顾客的便携终端的近距离无线通信等的通信与系统1进行通信等,由此系统1掌握该顾客的id,确认以往来店的历史记录,通过顾客的便携终端或店铺的显示装置,来向顾客提供适当的空位。通过顾客同意该座位来确定顾客的座位,通过基于便携终端的引导、基于店铺内的显示装置的显示、使用自动配餐机21将顾客引导到预约的座位等方式,将顾客引导到座位。能够由顾客的便携终端或店铺的专用终端等进行料理的订购。在没有空位的情况下,系统1通过在顾客的便携终端显示等待时间、在店铺的显示装置显示等待时间等,来向顾客提示所预想的等待时间、等待人数等,请求顾客是否等待空位的回答。在顾客选择了等待空位的情况下,随时向顾客通知等待状况,并且进行推荐菜单的介绍、店铺的介绍等的信息提供,在有了空位的情况下,按照顺序等待空位,如果到了该顾客的顺序,则以上述同样的方式引导到空位。
[0227]
关于结账,在来自便携终端的订单的情况下,能够从便携终端进行电子结算。在基于店铺的专用终端、语音识别装置的订单等的情况下,也能够进行来自顾客的便携终端的电子结算,但是如果店铺设置有自动结算装置,则顾客能够使用该自动结算装置而通过现金卡、信用卡、现金、电子货币、预付卡等的适当的结算方式进行支付。在店铺的出口预先设置闸口,如果通过顾客提示规定的id、例如基于便携终端的近距离无线通信的顾客的id而闸口打开,则能够识别未支付费用的顾客并控制闸口的开闭,此外,能够通过语音、显示来促使未支付的顾客支付费用。另外,在采用预先支付费用的系统的情况下,能够防止顾客在未支付的状态下离开店铺。
[0228]
接着,对于用于采购食材的订货、使库存管理自动化的方式、交付的食材自动补充到食材供给装置13、面条供给装置10的方式进行说明。实施例的系统1除了掌握所有顾客的订单数据以外,还掌握其他店铺的订单数据、以往的订单历史记录数据、天气数据、气温数据、湿度数据、日历信息、事件信息,外出人群预想信息、以及通过对拍摄单元进行图像识别而得到的店内的拥挤状况等的各种信息,根据这些信息来预测该店铺的来客数和各菜单的订单,能够预先管理食材、面条的库存,并且能够使用于采购食材的订货自动化。为了预测该店铺的来客数和各菜单的订单,也能够利用各顾客的订单数据、以往的订单历史记录数据、来自其他店铺等的关联系统的信息、信息调查机关的信息和互联网的信息等,例如能够通过使用人工智能的机器学习对这些大量的信息进行解析。
[0229]
关于与预先预测的订单对应的食材等的库存,根据订货的内容,按照系统1的库存管理进行管理。交付的库存在规定的存放场所进行管理,并且适当地供给到适当的食材供给装置13和面条供给装置10等。食材、面条向食材供给装置13和面条供给装置10等的补充例如能够使用自动配餐机21而实现自动化。
[0230]
[第五实施方式]
[0231]
对本发明的第五实施方式的料理自动提供系统1进行说明。在本实施方式中,说明在第一至第四实施方式中说明的料理自动提供系统1的应用场所不仅是能够预约座位的餐馆,而且各种方式的餐馆、食品出售店等也能够以多种方式实施。例如在超市、百货店、商店、便利店等中也能够使用本实施方式的料理自动提供系统1,例如,在便利店中能够由煎炸器进行包括油炸料理等的料理的自动烹调。此外,例如在宴会会场、结婚仪式会场、活动会场等中,也能够使用本实施方式的料理自动提供系统1。此外,在酒店、旅馆、民宿、公寓、
住宿设施等中也能够利用本实施方式的料理自动提供系统1。此外,例如在百货商店的食堂、购物中心的美食广场、员工食堂等中也能够利用本实施方式的料理自动提供系统1。此外,能够在移动式店铺、例如车辆内设置料理自动提供系统1,能够在车辆的移动中或在移动目的地进行自动烹调。此外,在店铺内制作料理并出售的店铺、小规模的店铺、临时设置的店铺、料理工厂等中也能够利用本实施方式的料理自动提供系统1。
[0232]
此外,在本实施方式的料理自动提供系统1中,能够实现全部工序自动化,但是也可以作为手动进行一部分工序的系统。例如,能够人工进行料理向提供容器17的盛入、浇头的盛入等的工序、料理向顾客的配送、顾客向座位的引导、空位的确认或座位的预约、从顾客接受料理的订单并将该订单输入到系统1、食材、面条的补充、准备、食材的订货、库存管理、提供容器17的清洗等的一部分。
[0233]
[第六实施方式]
[0234]
对本发明的第六实施方式的料理自动提供系统1进行说明。在本实施方式中,在第一至第五实施方式中说明的料理自动提供系统1还能够应用于配送店铺、配送工厂等。以下,对本实施方式的料理自动提供系统1应用于配送店铺的例子进行说明。
[0235]
顾客通过网站等使用智能手机或平板终端等的通信设备从远程向配送店铺的订单系统进行料理的订购。在配送店铺的网站中与推荐的料理、受欢迎的料理、料理的菜谱等的信息一起公开了所制作的多种料理。顾客不仅能够选择这些公开的料理,而且能够指定料理的菜谱、烹调方法(炒制时间、烹煮程度等)。此外,在顾客的以往的订单历史记录、顾客的喜好数据登录于配送店铺侧的订单系统的情况下,或者在顾客登录的情况下,通过使用来自以往的各种条件下的多个顾客的订单历史记录、关联店铺中的订单历史记录等的大数据的机器学习等,来基于顾客信息和顾客订购时的状况、例如季节、日期时间、天气、地域、关联的事件信息等而能够向顾客提供推荐的料理、推荐的菜谱、推荐的烹调方法等。
[0236]
配送店铺的订单系统如果接收到来自顾客的料理的信息和收件人的信息,则与确认接收到的料理的信息一并向顾客通知送达预定时刻的信息。配送店铺的订单系统与自身店铺所具有的配送系统和/或其他店铺运营的配送系统协作。如果配送店铺的订单系统从顾客接受订单,则订单系统安排到达到顾客指定的配送目的地的料理的配送,与接收到的料理的内容一并向顾客通知包含安排的配送预定时间的配送信息。在配送信息中能够包含配送线路、配送员的信息。在由于烹调的进展状况、道路状况等而送达预定时刻产生了规定的时间以上、例如5分钟以上的变更的情况下,还能够向顾客通知送达时刻的变更。
[0237]
在配送店铺通过订单系统接受顾客的订单的情况下,所述料理自动提供系统1在基于顾客的订单、此时的季节、日期时间、天气、采购的状况、采购的食材的状态、其他订单的状况等综合地进行了判断的基础上,对于顾客的订单,在还登录有顾客信息的情况下也将顾客的喜好信息等添加的基础上,根据与此时对应的适合于该顾客的菜谱和烹调方法来自动烹调料理。订单系统有时同时从多个顾客接受多个不同的料理的订单,因此设定为通过适当地确定烹调的顺序而使顾客等待的时间较短。
[0238]
如果顾客的订购的料理完成,则料理收纳于规定的配送容器后自动地交付给订单系统预先预约的配送员。此后,配送员按照配送店铺的指示,经配送线路到顾客指定的场所为止在由配送系统预先确定的时间以内将容纳在配送容器内的料理递送到顾客处。在订单系统接受到来自顾客的订单时,通过预先对费用进行电子结算,由此不需要进行送达时的
现金的交换。此外,由于配送员携带有便携终端,所以也能够在送达时由便携终端进行电子结算。此外,配送员也能够使用自动驾驶车辆、自动驾驶无人机等而自动配送系统,因此在这种情况下,能够包括订单受理、烹调、配送在内的所有工序实现无人的自动化。在食品安全上以及交通安全上,能够对自动化的一部分人工进行或人工监视,即使在人工进行一部分工序的情况下,与现有的配送店铺相比也能够大幅度节省人员。
[0239]
在本实施方式中以配送店铺为例进行了说明,但是本实施方式并不限定于此,例如,能够应用于比店铺规模大的配送工厂、餐厅、食堂中的外卖、移动式店铺(例如料理自动提供系统搭载车辆)中的现场出售、送餐等的各种方式下的料理的配送。
[0240]
[第七实施方式]
[0241]
对本发明的第七实施方式的料理自动提供系统1进行说明。在本实施方式中,在第一至第六实施方式中说明的料理自动提供系统1中还追加了进行番茄酱的烹调、汤的炖煮烹调、切碎葱的烹调等的食材准备的自动烹调机。在分别通过自动烹调机进行食材的准备的情况下,对各食材、例如番茄、葱的形状、颜色进行图像识别,掌握食材的种类、状态并输送到用于进行适用于食材加工的加工单元。该输送时,需要通过输送单元例如机械臂与食材的种类、状态配合来把持各食材的适当位置等而进行拾取并输送。
[0242]
因此,对于使用图像获取装置所获取的图像而对食材进行图像识别,并由机械臂拾取食材的单元,以番茄的外形和蒂的形状进行图像识别并通过机械臂从蒂的方向拾取番茄为例进行说明。对图像获取装置并没有特别限定,但是使用能够获取二维图像、例如二维彩色图像的照相机。作为图像输入装置,还可使用立体照相机等的能够获取立体图像的照相机,在此,以使用廉价的照相机的例子来对使用能够获取二维图像的照相机的情况进行说明。
[0243]
为了从二维图像对食材进行图像识别,使用神经网络而从二维图像输出食材的种类、食材的外形、食材的特征区域等的多个信息。例如在番茄的情况下,输出作为番茄的外形、特征区域的蒂的形状、位置等的信息。作为图像识别例如能够从公知的mask-rcnn等的二维图像输出物体的种类(以下称为“标签”)和物体的外形(轮廓掩膜图像)。
[0244]
在本实施方式的图像识别装置中,进一步扩展该mask-rcnn,从而不仅能够获取物体的外形,还能够获取物体的特征区域的掩膜图像。即,在番茄的例子中,能够输出番茄的外形、番茄的种类、番茄的蒂的掩膜图像。与单纯地分别学习物体的外形和物体的特征点的情况不同,通过将物体的外形和该物体的外形内的部分区域作为一体进行多任务学习、识别,来能够获取物体的特征区域的边界等清晰的掩膜图像。
[0245]
因此,向图像识别装置预先提供多个由物体的图像、物体的区域以及标签构成的数据,进而,作为特征区域的形状预先提供已知的形状。在番茄的例子中,预先提供番茄的图像、番茄的区域(轮廓)以及番茄的种类,进而,将一般的番茄的蒂的形状预先提供给mask-rcnn。此外,一般的番茄的蒂的形状中的番茄的蒂的中心位置是明确的,因此能够通过运算根据番茄的蒂的掩膜图像来求出番茄的蒂的中心位置。或者,可以通过将一般的番茄的蒂的中心位置的信息预先提供给图像识别装置,来输出番茄的蒂的中心位置。
[0246]
在此,预先提供给图像识别装置的不是所谓的模型数据,而是通过与一般的番茄的图像相关的数据进行学习,因此能够识别各种种类、颜色、大小的番茄。
[0247]
作为通过提供二维图像中的哪个像素与三维坐标的哪个位置对应来求解物体与
照相机的三维位置姿态关系的算法,例如能够采用作为公知的open computer vision library(开放式计算机视觉库,简称为“opencv”)的solve perspective-n-point(n点透视位姿求解,简称为solvepnp)的方法。通过在上述mask-rcnn所输出的mask图像中组合solvepnp,来即使不使用三维照相机等,也能够获得仅通过二维图像来推定物体的位置和姿态的图像识别装置。在番茄的例子中,能够根据番茄的外形和番茄的蒂的掩膜图像乃至中心位置,来计算出番茄的位置和姿态。如果从蒂的方向(以下称为“正面”)观察,则番茄在二维图像上呈大致圆形且大致旋转对称形状。但是,在从正面以外的方向观察的情况下,在二维彩色图像上外观上不是圆形、旋转对称形状,蒂的中心位置也被视为从番茄的轮廓的中心偏移。本实施方式的图像识别装置通过在二维图像上计算这种已知的特征以何种形态被观察,来能够获得从图像获取装置观察时物体位于哪个方向(物体的位置)、以何种形态倾斜(餐具的姿态)的情况。
[0248]
一般来说,图像处理而输出的物体的位置在照相机的光轴方向(进深方向)上精度差,而且,如果根据物体的模型数据而物体的尺寸预先不是已知的,则不能推定进深方向的距离。由于本实施方式的图像识别装置如上所述是无模型的,所以难以准确地计算从图像获取装置到物体的距离。因此,以下说明在本实施方式中用于使用图像识别装置来以无模型方式推定物体的位置和姿态并拾取该物体的方法。
[0249]
使机械臂沿着连接照相机坐标系原点和物体的直线移动,以使机械臂接近物体的轨道沿着图像获取装置例如二维照相机的光轴方向。例如,在维持机械臂的把持部件的轴线与经过番茄的中心而朝向番茄的蒂的直线(以下称为“番茄中心轴”)一致的姿态的状态下,使机械臂沿着连接照相机坐标系原点和番茄的蒂的中心的直线而使机械臂移动。在这种情况下,需要避免因位置、姿态的状态而导致机械臂的轴扭转、经由特殊姿态,从而不能在计划的轨道上使机械臂移动的事态。因此,在到与机械臂的把持部件的姿态对应的拾取目标终点姿态为止的经由点上,以将可操作性确保为固定值以上以及减少机械臂各轴的旋转量等为条件来控制机械臂。
[0250]
在机械臂的把持部件设置有把持传感器、例如接触传感器。如果机械臂的把持部件把持物体,则接触传感器反应而判断为拾取成功,提升机械臂并将物体输送到输送位置。如上所述,在图像识别装置通过二维图像以无模型方式识别图像的情况下,当不能准确地计算从图像获取装置到物体的距离时,将机械臂驱动到预想承载有物体的高度。在机械臂的把持部件到达承载有物体的承载面的高度的情况下,作为拾取失败而使机械臂提升到待机位置。另外,承载有物体的承载面的高度是机械臂驱动装置预先掌握的参数。由此,本实施方式的图像识别装置使用二维图像,并在未登录有模型图像的状态(无模型)下,也能够推定物体的位置和姿态而拾取该物体。
[0251]
在本实施方式中使用二维彩色图像,除了番茄整体的颜色、形状以外,还能够根据番茄的蒂的部分的掩膜图像除了判断番茄的种类以外,还能够判断番茄的新鲜度、成熟程度。为了推定番茄的种类、新鲜度、成熟程度,能够采用使用机器学习例如深度学习等的图像识别。能够根据推定的番茄的种类、新鲜度、成熟程度的信息,通过进一步运算来确定该番茄的加工方法。
[0252]
以上,以通过机械臂拾取番茄的情况为例进行了说明,但是本实施方式的图像识别装置对番茄以外的各种物体也同样使用二维图像,在未登录有模型图像的状态(无模型)
下,也能够推定物体的位置和姿态,并且能够基于该推定并使用机械臂来拾取该物体。例如在物体为大葱的情况下,本实施方式的图像识别装置能够输出大葱的种类、大葱的外形、以及作为大葱的特征区域的大葱的葱白部分的掩膜图像等的多个信息,由此,为了进行通过机械臂把持大葱的葱白部分的中心部来进行拾取、或进行仅切去大葱的葱白部分的加工,能够利用由图像识别装置所获得的信息。
[0253]
[第八实施方式]
[0254]
对本发明的第八实施方式的料理自动提供系统1进行说明。在本实施方式中,说明还将餐具自动清洗系统附加于在第一至第七实施方式中说明的料理自动提供系统1。为了店铺中的省力化,不仅餐具的配送,而且用餐后的餐具的回收、餐具的清洗、清洗的餐具的收纳也需要自动化。这些餐具的处理时,也能够利用所述第七实施方式中说明的图像识别装置。在此,对通过所述图像识别装置处理餐具的例子、特别是对清洗机中投入餐具、从清洗机中取出餐具、按餐具的种类将餐具容纳于容器中的系统进行说明。
[0255]
在实施方式7中,为了由机械臂拾取番茄,图像识别装置将番茄的蒂识别为特征区域,但是在餐具的情况下,特别是在盘子、碗等的情况下,将这些餐具的底部线纹区域作为特征区域来进行学习是有效的。即,在本实施方式的图像识别装置中以如下方式进行设计:除了餐具的外形以外,作为特征区域还能够同时学习并输出餐具的底部线纹区域的掩膜图像。在本实施方式的图像识别装置中,除了餐具的种类、餐具的外形以外,还通过对作为外形内的特征区域的餐具的底部线纹进行多任务学习、识别,来对底部线纹区域的掩膜图像也描绘清晰的圆形。
[0256]
因此,向图像识别装置预先提供多个由物体的图像、物体的区域以及标签构成的数据,此外,作为特征区域的形状预先提供已知的形状。在餐具的例子中,提供多组餐具的图像、餐具的区域(轮廓)、餐具的种类(标签)并进行学习。此外,通过将一般的底部线纹的底部线纹形状与已知的形状(圆、正方形、长方形等)进行比对,通过以下方法,能够计算其位置、姿态。根据餐具的底部线纹的倾斜度,在二维图像上,在外观上视为圆等的形状为细长且歪斜。利用该关系,通过计算求解已知的形状、例如圆形在二维照相机拍摄时在二维图像上以何种形状被观察,由此能够从二维照相机观察来推定餐具位于哪个方向、向哪个方向倾斜的情况。
[0257]
在此,预先提供给本实施方式的图像识别装置的不是所谓的模型数据,而是图像识别装置根据与一般的餐具的图像相关的数据进行学习,因此能够识别各种种类、颜色、大小的餐具。另外,本实施例的图像识别装置所使用的图像识别的算法可使用上述的第七实施方式的算法,因此省略对该算法的详细说明。
[0258]
一般来说,图像处理而输出的物体的位置在照相机的光轴方向(进深方向)上精度差,而且,如果根据物体的模型数据而物体的尺寸预先不是已知的,则不能推定进深方向的距离。由于本实施方式的图像识别装置如上所述是无模型的,所以难以准确地计算从图像获取装置到物体的距离。因此,以下说明在本实施方式中用于使用图像识别装置来以无模型方式推定物体的位置和姿态并拾取该物体的方法。
[0259]
使机械臂沿着连接照相机坐标系原点和物体的直线移动,以使机械臂接近物体的轨道沿着图像获取装置例如二维照相机的光轴方向。在此,对利用设置于机械臂的前端的吸附面而吸附餐具的底部线纹来进行拾取为例进行说明。作为使机械臂沿着二维照相机的
光轴方向靠近餐具的拾取轨道,使机械臂沿着连接照相机坐标系原点和餐具的直线移动。
[0260]
在直线轨道上以维持机械臂的吸附面的姿态的状态移动的情况下,需要避免因位置、姿态而导致机械臂的轴扭转、经由特殊姿态,从而不能沿着计划的轨迹而控制机械臂的情况。因此,在到与餐具姿态和位置对应的拾取目标终点姿态为止的经由点上,以将可操作性确保为固定值以上以及减少机械臂各轴的旋转量的方式,进行餐具法线周围的摆动角和吸附垫的区分使用。即,在机械臂上能够设置朝向不同的(例如朝向90度不同)两个吸附垫。
[0261]
如果设置在对吸附垫进行抽真空的真空路径内的吸附传感器反应,则作为拾取成功而提升机械臂,接着,将餐具收纳于规定的收纳容器等。即使在进深的距离不确定的情况下,为了能够拾取餐具,到餐具的承载面的高度为止使机械臂的吸附垫靠近餐具的底部线纹。如果机械臂的吸附垫到达餐具的承载面的高度,则判断为拾取失败,使机械臂提升到待机位置。另外,承载有餐具的承载面的高度是机械臂驱动装置预先掌握的参数。由此,本实施方式的图像识别装置使用二维图像,并在未登录有模型图像的状态(无模型)下,也能够对餐具推定位置和姿态而拾取该物体。
[0262]
如果将该图像识别装置应用于被餐具清洗机清洗的餐具的拾取,则对于由餐具清洗机清洗的餐具,,能够使设置在机械臂的吸附垫与餐具的底部线纹的中心接触而拾取餐具,并从餐具清洗机或从投入到餐具清洗机的餐具架按照餐具的种类将餐具容纳于容纳容器。
[0263]
接着,使用图7和图8,对将该图像识别装置应用于将使用完的餐具投入到餐具清洗机或将餐具容纳于投入到餐具清洗机的餐具架的例子进行说明。图7是说明基于餐具清洗机的餐具的清洗的说明图,图8是图7的在餐后餐具拾取的图像识别的说明图。
[0264]
如图7所示,在基于餐具清洗机的餐具的清洗工序中包括:(1)餐后餐具拾取工序、(2)剩饭处理和预清洗工序、(3)将餐具放入架子中的工序、以及(4)将清洗完的餐具从架子取出并收纳的工序等。其中(4)的工序与通过设置在机械臂的吸附垫来拾取所述餐具的底部线纹并按照餐具的种类将餐具容纳于容纳容器的工序相同。上述(2)和(3)的工序是通过上述(1)的餐后餐具拾取工序由机械臂拾取了餐具后的工序,是在拾取了餐具的状态下进行预清洗、接着通过规定的规则将餐具容纳于清洗用的餐具架的工序。
[0265]
上述(1)的工序是判别使用完的餐具的种类而与垃圾进行区分并由机械臂的把持单元拾取的工序,因此能够应用于在上述的第七实施方式中说明的图像识别装置。图8示出在上述(1)的工序中通过图像识别装置来识别餐具的种类(盘子、杯子、碗、筷子等)和垃圾(纸屑等)的情况。如图8所示,通过本实施方式的图像识别装置,来能够区分并识别餐具的种类和垃圾。因此,基于该图像识别装置所识别的信息,能够通过上述(1)的餐后餐具拾取工序中的基于机械臂的适当的餐具把持单元,来进行餐具的拾取控制。
[0266]
[第九实施方式]
[0267]
参照图9~图18,说明本发明的第九实施方式的料理自动提供系统1。在本实施方式中,说明在第一至第八实施方式中说明的料理自动提供系统1中食材供给装置的具体例。其中,在本实施方式中示出食材供给装置的一例,本发明并不限定于本实施方式,也能够采用其他方式的食材供给装置。
[0268]
图9是食材供给装置50的概略图。食材供给装置50具备:食材容器放置架52,其用于容纳食材容器51;食材容器落下装置53,其用于使规定的食材容器51从食材容器放置架
52落下;食材容器滑动装置54,其用于使从食材容器落下装置53落下的食材容器51滑动而进行输送;食材容器取出装置55,其用于使在食材容器滑动装置54中输送的食材容器51旋转而取出所容纳的配料;以及食材容器存放装置56,其用于存放食材容器取出装置55所取出的食材容器51。
[0269]
食材容器放置架52为食材容器51能够在食材容器滑动装置54的长度方向、宽度方向上排列的同时在高度方向上也重叠有多个的状态下,食材容器放置架52的整体能够容纳于冰箱内,并且能够将食材容器放置架52的整体从冰箱内滑动而被取出。食材容器放置架52构成为:在食材容器滑动装置54的长度方向和宽度方向上以矩阵状设置有隔板,以矩阵状隔开的各空间能够在高度方向上容纳多个食材容器51。虽然没有特别限定,但是在食材容器放置架52中例如能够在食材容器滑动装置54的长度方向上容纳四个、在宽度方向上容纳四个、在高度方向上容纳八个食材容器51。
[0270]
食材容器落下装置53使容纳在食材容器滑动装置54的规定的食品容器51向食材容器滑动装置54落下。食材容器落下装置53能够从以矩阵状容纳在食材容器放置架52的多个食材容器51中仅选定已被确定的食材容器51并使其逐一落下。在食材容器放置架52的多个食材容器51中能够预先容纳不同种类的食材。能够根据对应的菜单的种类等自由设定向食材容器放置架52的哪个位置补充容纳有哪种食材的食材容器51。例如,能够向分隔为矩阵状的一个分隔部中补充容纳有相同种类的食材的食材容器51。补充时在料理自动提供系统1中预先确定在哪个位置容纳哪种食材,按照该预先确定的方式容纳有各食材的食材容器51容纳于食材容器放置架52的规定的位置。
[0271]
食材容器滑动装置54使从食材容器落下装置53落下的规定的食材容器51滑动而输送到图9的左侧的排出位置。在位于食材容器滑动装置54的排出位置的食材容器取出装置55中,通过使食材容器51旋转来取出容纳在内部的食材,成为空的食材容器51以开口侧向下俯卧的状态向食材容器存放装置56移动。存放在食材容器存放装置56中的空的食材容器51被食材容器回收单元、例如机械臂等回收。另外,也可以通过人工回收存放在食材容器存放装置56中的空的食材容器51。
[0272]
图10是食材容器放置架用的滑动装置的说明图。食材容器放置架52能够整体容纳于冰箱内,并且在滑动装置57的作用下整体从冰箱内滑动而取出。
[0273]
图11是食材容器的说明图。图11a是俯视图,图11b是立体图,图11c是侧视图,图11d是后视图。食材容器51具有:食材投入部60、落下防止部61、滑动部62、底部防粘部63、旋转轴64、以及被按压部65。在食材投入部60中能够在内部设置分隔部,在图11的例子中,食材投入部60由一个分隔部分为两个空间。
[0274]
在食材容器51的两侧面设置有向侧方突出设置的一对落下防止部61。在食材容器放置架52设置有向食材容器放置架52的以矩阵状分隔的各空间的内方突出且沿高度方向延伸的轨道状部件。该轨道状部件设计成:插入到分别突出设置在食材容器51的两侧面的一对落下防止部61之间,从食材容器放置架52的上方补充食材容器51时,通过食材容器51沿着轨道状部件滑动接触,来在食材容器放置架52的以矩阵状分隔的各空间内以食材容器51不会落下且从上方补充的食材容器51维持姿态的状态顺畅地滑落。
[0275]
滑动部62设计成:设置在落下防止部61的下部面,并沿着后述的滑轨70(图15)的两侧壁的上部面滑动。由此,在食材容器滑动装置54中食材容器51能够以维持稳定的姿态
的状态滑动。
[0276]
在食材容器51的下部(图11c的右下端)设置有例如一对底部防粘部63,食材容器51在食材容器放置架52内在上下方向上重叠存放时,能够在容纳于下方的另一个食材容器51的上部面凸缘部上以将食材容器51的姿态保持为水平的状态进行承载。此外,因底部防粘部63而食材容器51能够在滑轨70的底面平顺地滑动。
[0277]
在食材容器51的下部(图11c的左下端)设置有例如一对旋转轴64。在食材容器滑动装置54的食材容器51的排出位置,通过旋转轴64与旋转轴卡合部件73卡合来使食材容器51以旋转轴64为中心旋转而向下方取出容纳在食材投入部60中的食材。此外,旋转轴64与底部防粘部63一同承载食材容器51时,能够将其姿态保持为水平。
[0278]
设置在食材容器51的背面的被按压部65是被后述的按压部件72(图15)按压的部分。被按压部65具有在高度方向上延伸且在食材容器51的背面的宽度方向上交替设置的多个凹凸形状部。通过按压部件72按压凹凸形状部来将按压部件72与被按压部件65之间的滑动阻力调整为适度,能够以将食材容器51的姿态保持为水平的状态在滑轨70上顺畅地输送食材容器51。
[0279]
图12是食材容器落下装置的立体图。此外,图13是图12的各部件的俯视图。食材容器落下单元53具有:固定轨道67;以及以能够相对于固定轨道67滑动的的方式被把持的第一滑轨68和第二滑轨69。在固定轨道的上部面内侧设置有具有间隔a的周期的规定间距的多个凹部。在第一滑轨68的内侧设置有具有间隔a的周期的规定间距的凹部。此外,在第二滑轨69的内侧设置有具有间隔b的周期的规定间距的凹部。
[0280]
图14是食材容器落下装置53的动作说明图,说明了最先使位于“4”的位置的食材容器51落下,接着使位于“1”的位置的食材容器51落下的动作。固定轨道67、第一滑轨68以及第二滑轨69构成为:沿着各滑轨70设置有一组,能够使存放在滑轨上的四个部位的食材容器51中的被指定的食材容器51落下。
[0281]
在图14a中,“1”~“4”中的任一个位置的食材容器51均被固定。在图14b中,第一滑轨68移动规定量而只有最右侧“4”的位置的一个食材容器51落下并立即返回到图14c的位置。在图14d中,第二滑轨69向右侧移动规定量,并接着在图14e中,第一滑轨68也向右方向移动规定量,由此最左侧“1”的位置的一个食材容器51落下,此后,立即返回到例如图14a的位置。通过这种动作,能够从被指定的位置逐一取出食材容器51。
[0282]
图15是食材容器滑动装置54的立体图。食材容器滑动装置54具有:滑轨70、驱动力产生装置71、按压部件72、以及旋转轴卡合部件73。滑轨70接上所落下的食材容器并向排出位置输送。滑轨70的剖面为向上敞开的
コ
形,在上部面被敞开的两侧面(以下有时称为“侧轨道”)具有凸缘。食材容器51的滑动部62的下部面与该一对凸缘部的上部面滑动接触。驱动力产生装置71驱动按压部件72,在按压部件72的按压作用下将所落下的食材容器51向排出位置输送。
[0283]
在滑动部62的作用下食材容器51能够以保持水平姿态的状态沿着滑轨70而被输送。该输送时,还可设定成:设置在食材容器51的下部面的旋转轴64和底部防粘部63与滑轨70的底部的上部面滑动接触,但是本实施方式并不限定于此,例如,食材容器51的滑动部62的下部面可以与凸缘部的上部面滑动接触,或者也可以在旋转轴64和底部防粘部63与滑轨70的底部的上部面之间设置规定的间隙。
[0284]
旋转轴卡合部件73是设置在滑轨70的排出部位的例在宽度方向上横跨而设定的销状的部件,宽度方向的中央部向下方弯曲成
コ
形,宽度方向的两端部在从滑轨70的底面至规定的高度位置大致水平设置,在宽度方向的两端部中,旋转轴卡合部件73以与食材容器51底部的一对旋转轴64卡合的方式设置。此外,在旋转轴卡合部件73的宽度方向的中央部具有向下方弯曲成
コ
形的部位,并成为使按压部件72经过该向下方弯曲成
コ
形的部位的上方的位置关系。通过这种设定,按压部件72的前端侧能够在滑轨70的排出部位处以不会与旋转轴卡合部件73产生干扰的方式前进至其前端,因此通过越过滑轨70的排出端部并按压食材容器51的背面,来解除旋转后成为空的食材容器51的旋转轴64与旋转轴卡合部件73的卡合,食材容器51以将配料供给部60的开口侧朝下的姿态向食材容器存放装置56移动。
[0285]
图16是食材容器滑动装置54的动作说明图。在图16a中,食材容器51的滑动部62的下部面与滑轨70的侧轨道的凸缘部的上部面滑动接触,因此在食材容器51的姿态保持为水平的状态下,能够将食材容器51沿着滑轨70朝向排出位置输送。
[0286]
在图16b中,食材容器51底面的旋转轴73与旋转轴卡合部件73的宽度方向的两端部卡合,进一步被按压部件72按压,由此食材容器51以旋转轴73为中心开始旋转。
[0287]
在图16c中,用按压部件72进一步按压开始旋转的食材容器51而使食材容器51进一步旋转。此时,食材容器51的旋转进行,连接食材容器51的重心位置和旋转轴64的直线与从旋转轴卡合部件73的铅垂线相比超过规定角度、例如5度左右而向排出侧移动时,食材容器51因自重而进一步旋转,在图16d的位置旋转至大致180度,从后述的食材落下孔取出容纳在食材容器51的食材。在图16d中,如果按压部件72进一步按压食材容器51,则解除食材容器51的旋转轴64与旋转轴卡合部件73的卡合,食材容器51以使配料供给部60的开口侧朝下的姿态移动至食材容器存放装置56的规定的存放位置。
[0288]
图17是食材容器取出装置的立体图,示出食材容器51位于图16d的位置时的状态。滑轨70设置有多列、例如四列。在滑轨70的排出位置上方设置有盖部件76。盖部件不仅能够防止异物混入,还具有防止食材容器51过度旋转而超调(overshoot)的作用。
[0289]
图18是食材容器取出装置的俯视图。食材容器51位于图16d的位置时,在食材容器51的正下方的位置设置有配料落下孔75,因食材容器51旋转而从食材容器51落下的食材经由配料落下孔75投入到被输送到其下方位置的烹调容器14。
[0290]
在本实施方式中,作为一例说明了使用四个滑轨70的例子,但是本发明并不限定于此。例如也可以使用在宽度方向上能够移动的一个滑轨70,与食材容器51落下的位置配合而使滑轨70移动来接收落下的食材容器51。在这种情况下,如果使用食材容器取出装置55和配料落下孔75等也能够与滑轨70一同移动的装置,则只要对一个可移动的滑轨70也设置一组食材容器取出装置55和配料落下孔75等即可。此外,也能够使用多个、例如两个在宽度方向上能够移动的滑轨70等。另外,在设置有多个滑轨70的情况下,能够使多个食材容器51同时落下。
[0291]
以上,对本发明的多种实施方式进行了说明,但是这些实施方式例示用于实现本发明的技术思想的料理自动提供系统,本发明并不限定于此,也能够同样地应用于其他实施方式,此外,能够对这些实施方式的一部分进行省略、追加、变更、或者组合各实施方式的方式。例如在完全自动系统中,也可以根据需要将其一部分置换为手动等。
[0292]
(附图标记说明)
[0293]1…
料理自动提供系统
[0294]
10
…
面条供给装置
[0295]
11
…
烹煮器
[0296]
12
…
煮面篓
[0297]
13
…
食材供给装置
[0298]
14
…
烹调容器
[0299]
15
…
机械臂
[0300]
16
…
电磁烹调器
[0301]
17
…
提供容器
[0302]
18
…
提供容器供给装置
[0303]
19
…
清洗机
[0304]
20
…
配餐输送机
[0305]
21
…
自动配餐机
[0306]
30
…
面条
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1