一种扫地智能机器人的传感器的制作方法
1.本实用新型涉及智能机器人技术领域,具体为一种扫地智能机器人的传感器。
背景技术:
2.又称外部受控机器人,机器人的本体上没有智能单元只有执行机构和感应机构,它具有利用传感信息包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等进行传感信息处理、实现控制与操作的能力,受控于外部计算机,在外部计算机上具有智能处理单元,处理由受控机器人采集的各种信息以及机器人本身的各种姿态和轨迹等信息,然后发出控制指令指挥机器人的动作,机器人世界杯的小型组比赛使用的机器人就属于这样的类型
3.现有技术中,大多数扫地机器人的传感器都是安装在机器人内部进行工作的,当传感器需要进行检查或者维修时,往往需要通过工具打开装置的壳体然后才能对其进行检查或者维修,在此过程中,就会浪费大量的时间,在进行拆卸的过程,可能对机器人造成一定的损伤。
技术实现要素:
4.本实用新型的目的在于提供了一种扫地智能机器人的传感器,达到解决上述背景技术中提出问题的目的。
5.为实现上述目的,本实用新型提供如下技术方案:一种扫地智能机器人的传感器,包括机器仓,所述机器仓的内壁设置有传感机构,所述传感机构包括垫板、气缸、横板、连接杆、传感器、连接块、固定轴和转板;
6.所述垫板安装在机器仓的内壁底部,所述气缸安装在垫板的上表面,所述气缸的输出端安装有伸缩杆,所述横板安装在伸缩杆的顶部,所述传感器安装在横板的上表面,所述连接杆的数量有两个,两个所述连接杆的底部安装在横板的上表面,所述固定轴安装在机器仓的顶部,所述转板的一端安装在固定轴的上表面,所述连接块安装在转板的底部,所述连接块的内壁与连接杆的顶部相连接。
7.优选的,所述机器仓的底部固定安装有加工块,所述加工块的底部活动安装有滚轮,所述加工块的内壁固定安装有电机,所述电机的两端安装有转轴,所述转轴的另一端均安装有滑轮。
8.优选的,所述机器仓的侧壁固定安装有防雨块,所述机器仓的表面固定安装有开关,所述开关的输出端安装有导线,所述导线的另一端与气缸相连接。
9.优选的,所述机器仓的底部设置有扫地机构,所述扫地机构包括固定板、安装套、防尘块、吸收器、支撑架、吸收管、矩形块和通孔。
10.优选的,所述安装套固定安装在机器仓的底部,所述安装套安装在转轴的表面,所述支撑架固定安装在安装套的底部,所述吸收器固定安装在支撑架的底部,所述吸收管固定安装在吸收器的输出端。
11.优选的,所述固定板的一端固定安装在加工块的侧壁,所述矩形块固定安装在加
工块的另一端,所述防尘块固定安装在矩形块的内壁,所述吸收管的底部穿过矩形块的内壁延伸至矩形块的内壁,所述通孔开设在矩形块的底部。
12.本实用新型提供了一种扫地智能机器人的传感器。具备以下有益效果:
13.(1)、本实用新型通过气缸进行工作,气缸通过输出端的伸缩杆带动横板的位置向上进行移动,连接杆的顶部会对连接块进行挤压,进一步促使转板围绕着固定轴进行转动,同时横板的位置也会向上进行升起,达到传感器就会露出表面,方便维修人员的维修的目的,解决了现有技术中,大多数扫地机器人的传感器都是安装在机器人内部进行工作的,当传感器需要进行检查或者维修时,往往需要通过工具打开装置的壳体然后才能对其进行检查或者维修,在此过程中,就会浪费大量的时间,在进行拆卸的过程,可能对机器人造成一定损伤的问题。
14.(2)、本实用新型通过同时可以开启吸收器,吸收器会通过吸收管进行吸收,同时会促使地面上灰尘和一些小型垃圾会通过通孔进入到矩形块的内部,达到提高机器人的工作效率。
附图说明
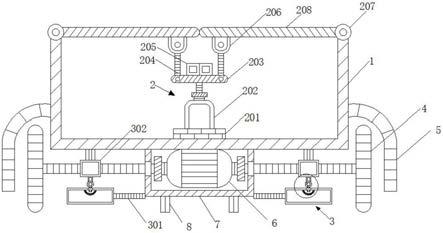
15.图1为本实用新型正面剖视图;
16.图2为本实用新型图1中a的局部放大图;
17.图3为本实用新型正视图;
18.图4为本实用新型矩形块的俯视图。
19.图中:1机器仓、2传感机构、201垫板、202气缸、203横板、204连接杆、205传感器、206连接块、207固定轴、208转板、3扫地机构、301固定板、302安装套、303防尘块、304吸收器、305支撑架、306吸收管、307矩形块、308通孔、4滑轮、5防雨块、6电机、7加工块、8滚轮、9开关。
具体实施方式
20.如图1-4所示,本实用新型提供一种技术方案:一种扫地智能机器人的传感器,包括机器仓1,机器仓1的底部固定安装有加工块7,加工块7的底部活动安装有滚轮8,加工块7的内壁固定安装有电机6,电机6的两端安装有转轴,转轴的另一端均安装有滑轮4,机器仓1的侧壁固定安装有防雨块5,机器仓1的表面固定安装有开关9,开关9的输出端安装有导线,导线的另一端与气缸202相连接,机器仓1的内壁设置有传感机构2,传感机构2包括垫板201、气缸202、横板203、连接杆204、传感器205、连接块206、固定轴207和转板208;
21.垫板201固定安装在机器仓1的内壁底部,气缸202固定安装在垫板201的上表面,气缸202的输出端安装有伸缩杆,横板203固定安装在伸缩杆的顶部,传感器205安装在横板203的上表面,连接杆204的数量有两个,两个连接杆204的底部活动安装在横板203的上表面,固定轴207固定安装在机器仓1的顶部,转板208的一端活动安装在固定轴207的上表面,连接块206固定安装在转板208的底部,连接块206的内壁与连接杆204的顶部活动连接,通过气缸202进行工作,气缸202通过输出端的伸缩杆带动横板203的位置向上进行移动,连接杆204的顶部会对连接块206进行挤压,进一步促使转板208围绕着固定轴207进行转动,同时横板208的位置也会向上进行升起,达到传感器205就会露出表面,方便维修人员的维修
的目的,解决了现有技术中,大多数扫地机器人的传感器都是安装在机器人内部进行工作的,当传感器需要进行检查或者维修时,往往需要通过工具打开装置的壳体然后才能对其进行检查或者维修,在此过程中,就会浪费大量的时间,在进行拆卸的过程,可能对机器人造成一定损伤的问题;
22.机器仓1的底部设置有扫地机构3,扫地机构3包括固定板301、安装套302、防尘块303、吸收器304、支撑架305、吸收管306、矩形块307和通孔308,安装套302固定安装在机器仓1的底部,安装套302安装在转轴的表面,支撑架305固定安装在安装套302的底部,吸收器304固定安装在支撑架305的底部,吸收管306固定安装在吸收器304的输出端,固定板301的一端固定安装在加工块7的侧壁,矩形块307固定安装在加工块7的另一端,防尘块303固定安装在矩形块307的内壁,通过防尘块303有效防止较多尘埃进入到吸收器304的内壁,造成损坏的情况,吸收管306的底部穿过矩形块307的内壁延伸至矩形块307的内壁,通孔308开设在矩形块307的底部,通过同时可以开启吸收器304,吸收器304会通过吸收管306进行吸收,同时会促使地面上灰尘和一些小型垃圾会通过通孔308进入到矩形块307的内部,达到提高机器人的工作效率。
23.工作原理:装置在进行使用的时候,首先就可以开启电机6,电机6开启的时候,就会带动两端的转轴进行转动,转轴转动的过程中,会进一步带动滑轮4进行转动,滑轮4就可以控制装置的位置,通过底部的滚轮8,可以控制机器人的移动方向,在此过程中,同时可以开启吸收器304,吸收器304会通过吸收管306进行吸收,同时会促使地面上灰尘和一些小型垃圾会通过通孔308进入到矩形块307的内部,在此过程中,可以开启开关9,开关9会通过导线的作用下,进一步带动气缸202进行工作,气缸202通过输出端的伸缩杆带动横板203的位置向上进行移动,在连接杆204的作用下,连接杆204的顶部会对连接块206进行挤压,进一步促使转板208围绕着固定轴207进行转动,同时横板208的位置也会向上进行升起,装置完成工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1