冲击振动式破冻土机的制作方法
[0001]
本发明属于机械设备技术领域,尤其涉及一种冲击振动式破冻土机。
背景技术:
[0002]
我国冻土分布广泛,冻土开挖问题更普遍,但由于冻土硬度较大,导致冻土开挖困难、驾驶者长时间工作劳累,是目前困扰寒区工程作业一项技术难题。随着我国建设重点西移以及西部大开发推进,冻土区成为建设重点,正蓬勃发展,且必将持续“升温”。而在冻土区民用、军事、抢修工程等项目中,冻土施工不可避免。
[0003]
冲击振动式破冻土机正是针对冻土环境施工存在的问题,改善冻土开挖方法,促进冻土区工程建设。相信在投入市场后,可在冻土工程中起关键作用。现有破冻土机通常采用热融法、爆破法和机械法等方式进行破冻土,破冻土方式老旧。热融法效率低、耗能大;爆破法仅适于对较厚坚硬冻土层作业,危险性高;机械开挖法多为低效切削工具,少有创新。同时,在高海拔高严寒下机械易出现功能障碍,甚至产生大量废气,造成污染。
技术实现要素:
[0004]
本发明主要解决现有破冻土机破冻土方式老旧、在高海拔高严寒下机械易出现功能障碍等技术问题,提出一种冲击振动式破冻土机,结合模型分析与冲击实验确定的最有效冲击破碎方法,并且优化外形,采用轮履结合的行驶方式,机械臂与仿生钳减少人工劳动强度,优化驾驶室人机设计。
[0005]
本发明的技术方案:
[0006]
一种冲击振动式破冻土机,包括动力头机构1、机械臂及驱动机构2、仿生钳及驱动机构3、驾驶操控系统4、转台及回转机构5和行走底盘及驱动机构6;所述转台及回转机构5设置在行走底盘及驱动机构6上,所述机械臂及驱动机构2、仿生钳及驱动机构3和驾驶操控系统4设置在转台及回转机构5上设置;所述动力头机构1设置在机械臂及驱动机构2末端。
[0007]
所述行走底盘及驱动机构6包括车轮601、行走架602、摆动液压缸607和履带机构;所述履带机构包括支重轮603、履带架604、驱动轮605、行走马达 606、引导轮608和履带609;所述行走架602分为前段、中段和后段;所述车轮601设置在行走架602的四角,所述履带架604设置在行走架602的中段两侧,两个履带架604之间设有三个传动轴,传动轴的两端对称安装有支重轮603、驱动轮605和引导轮608,驱动轮605和引导轮608分别位于行走架602两侧的前后两端,支重轮603位于驱动轮605和引导轮608之间,起支重作用;所述摆动液压缸607分别设置在行走架602的前段和后段两侧,摆动液压缸607的缸体固定在转台及回转机构5上,且与驱动机构402连接获得驱动力,摆动液压缸607的活塞杆与行走架602的前段和后段固定连接,摆动液压缸607带动行走架602的前段和后段抬起,从而实现车轮601的贴地抬升或离地收放;所述履带609安装在驱动轮605和引导轮608上;行走马达606设置在行走架602 两侧,与驱动轮605传动连接,且行走马达606与驾驶操控系统4的驱动机构 402传动连接。
[0008]
所述转台及回转机构5包括上车平台501、回转机构502和覆盖件503;所述上车平台501设置在行走底盘及驱动机构6上表面,上车平台501与回转机构502上端连接,回转机构502下端与行走底盘及驱动机构6的行走架602连接,上车平台501和行走架602在回转机构502的驱动下实现360
°
连续回转;所述覆盖件503设置在上车平台501上方,并与上车平台501固定连接,用于保护转台及回转机构5内部的构件。
[0009]
所述驾驶操控系统4包括驱动机构402;所述驱动机构402设置在转台及回转机构5内部,所述驱动机构402的输出端分别与仿生钳及驱动机构3和行走底盘及驱动机构6的行走马达606传动连接;
[0010]
所述机械臂及驱动机构2包括第一变幅油缸201、第二变幅油缸202、第三变幅油缸203、前臂204、后臂205、第二转动关节206和第一转动关节207;所述第二转动关节206固定在转台及回转机构5的上车平台501上,第二转动关节206与后臂205的一端铰接,第二转动关节206与第三变幅油缸203的缸体铰接,第三变幅油缸203的活塞杆的端部固定在后臂205上;所述后臂205 的另一端通过第一转动关节207与前臂204的一端连接,且后臂205上设置第二变幅油缸202,第二变幅油缸202的活塞杆与第一转动关节207的一端铰接;所述前臂204的另一端与动力头机构1的托架105通过转动连杆104铰接,且前臂204上设置有第一变幅油缸201,第一变幅油缸201的活塞杆与转动连杆 104铰接。
[0011]
所述动力头机构1包括动力头101、冲杆102、冲头103、转动连杆104和托架105;所述托架105与前臂204的前端铰接并通过转动连杆104实现转动;所述托架105与动力头101固定连接,为动力头101提供支撑;所述动力头101 与冲杆102固定连接,为冲杆102提供动力;所述冲杆102前端与冲头103固定连接;
[0012]
所述仿生钳及驱动机构3包括关节驱动舵机301、基节302、股节303、胫节304和钳305;所述基节302,其一端与驱动机构402传动连接,使仿生钳及驱动机构3与驾驶操控系统4连接,获得动力,其另一端与关节驱动舵机301 连接,通过关节驱动舵机301实现多向转动与驱动功能;所述关节驱动舵机301 的下端设置股节303,通过股节303实现竖向平面旋转功能,并通过股节303使关节驱动舵机301与胫节304连接;所述钳305设置在胫节304前端,通过钳 305对在冲击破碎中产生的冻土碎块进行夹持。
[0013]
优选的,所述动力头101采用常规式动力头、地钻式动力头或楔形动力头。
[0014]
优选的,所述驾驶操控系统4还包括:驾驶室和外置阶梯401;驾驶室内设置座椅、方向盘、操控杆和控制界面;所述外置阶梯401位于转台及回转机构5 外部。
[0015]
所述行走架602,其前段与中段活动连接,中段与后段活动连接。
[0016]
本发明的有益效果:本发明提供的一种冲击振动式破冻土机,针对我国冻土区广泛且施工严峻现状,解决了冻土施工效率低的问题,以冲击振动原理破碎冻土,经shpb与hjc模型分析与冲击试验,确定最有效冲击破碎方法。通过螃蟹仿生优化外形,履带式行走底盘及驱动机构保障安全行驶,机械臂与仿生钳减少人工劳动强度,驾驶室弧形玻璃避免视觉死角,内饰人机设计提高作业舒适度。
附图说明
[0017]
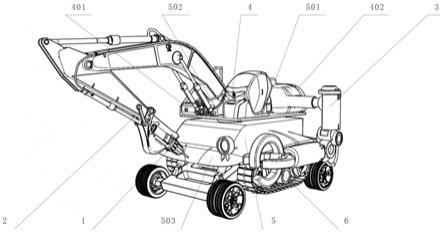
图1是本发明提供的冲击振动式破冻土机的结构示意图;
[0018]
图2是本发明提供的机械臂及驱动机构的结构示意图;
[0019]
图3(a)~图3(c)是本发明提供的动力头的结构示意图;
[0020]
图4是本发明提供的仿生钳及驱动机构的结构示意图;
[0021]
图5是本发明提供的行走底盘及驱动机构的结构示意图。
[0022]
图中:1、动力头机构;2、机械臂及驱动机构;3、仿生钳及驱动机构;4、驾驶操控系统;5、转台及回转机构;6、行走底盘及驱动机构;101、动力头; 102、冲杆;103、冲头;104、转动连杆;105、托架;201、第一变幅油缸;202、第二变幅油缸;203、第三变幅油缸;204、前臂;205、后臂;206、第二转动关节;207、第一转动关节;301、关节驱动舵机;302、基节;303、股节;304、胫节;305、钳;401、外置阶梯;402、驱动机构;501、上车平台;502、回转机构;503、覆盖件;601、车轮;602、行走架;603、支重轮;604、履带架; 605、驱动轮;606、行走马达;607、摆动液压缸;608、引导轮;609、履带。
具体实施方式
[0023]
以下结合附图和技术方案,进一步说明本发明的具体实施方式。
[0024]
图1是本发明提供的冲击振动式破冻土机的结构示意图。如图1所示,本发明实施例提供的冲击振动式破冻土机,包括:动力头机构1、机械臂及驱动机构2、仿生钳及驱动机构3、驾驶操控系统4、转台及回转机构5和行走底盘及驱动机构6。
[0025]
所述行走底盘及驱动机构6上设置转台及回转机构5,所述转台及回转机构 5上分别设置机械臂及驱动机构2、仿生钳及驱动机构3和驾驶操控系统4;所述机械臂及驱动机构2末端设置动力头机构1,并为动力头机构1提供动力。
[0026]
图2是本发明提供的机械臂及驱动机构的结构示意图。如图2所示,所述机械臂及驱动机构2包括第一变幅油缸201、第二变幅油缸202、第三变幅油缸 203、前臂204、后臂205、第二转动关节206和第一转动关节207;所述第二转动关节206固定在转台及回转机构5上,具体固定在转台及回转机构5的上车平台501上;所述第二转动关节206与第三变幅油缸203的缸体铰接,所述第三变幅油缸203的活塞杆固定在后臂205上;通过第三变幅油缸203,以液压方式控制后臂205的起落。所述后臂205通过第一转动关节207与前臂204连接,且所述后臂205上设置第二变幅油缸202,所述第二变幅油缸202的活塞杆与前臂204的一端铰接,通过第二变幅油缸202以液压方式控制前臂204的起落;所述前臂204的另一端与动力头机构1连接;所述前臂204与动力头机构1之间设置第一变幅油缸201,通过第一变幅油缸201以液压方式实现动力头机构1 的起落。
[0027]
机械臂及驱动机构2对动力头机构1起到固定支撑作用,通过机械臂及驱动机构2控制动力头机构1的位置,以最佳入射角进行冲击振动破碎冻土。本实施例给出一种较好的机械臂及驱动机构2的结构形式,但是对机械臂及驱动机构2具体结构不做限定,其他可以与动力头机构1匹配并且起到操控固定作用的机械臂及驱动机构可以作为替换。
[0028]
图3(a)~图3(c)是本发明提供的动力头的结构示意图;如图3所示,所述动力头机构1包括动力头101、冲杆102、冲头103、转动连杆104和托架 105;所述托架105与机械臂及驱动机构2固定连接并通过转动连杆104实现转动;所述托架105与动力头101固定连接,为动力头101提供支撑;所述动力头101与冲杆102固定连接,为冲杆102提供动力;所述冲杆102与冲头103 固定连接。动力头机构1通过托架105与机械臂及驱动机构2固定连接,通过动力头101传递动力。其中,考虑到不同土质,为了增强本发明破冻土机的适用性,动力头
101可更换,动力头101可以采用常规式动力头(图3(a))、地钻式动力头(图3(b))和楔形动力头(图3(c))中的一种。常规式动力头用于普通破碎;地钻式动力头为螺旋形,用于有效破碎较大、较硬的土块,有效均匀土壤,破碎效果好;楔形动力头适用于大面积冻土开挖,大而深的基坑或水下破碎。
[0029]
图4是本发明提供的仿生钳及驱动机构的结构示意图。如图4所示,所述仿生钳及驱动机构3包括关节驱动舵机301、基节302、股节303、胫节304和钳305;所述仿生钳及驱动机构3通过基节302与驱动机构402传动连接,获得动力;所述基节302与关节驱动舵机301连接,通过关节驱动舵机301实现多向转动与驱动功能;所述关节驱动舵机301的下端设置股节303,通过股节303 实现竖向平面旋转功能;所述股节303与胫节304连接;所述胫节304与钳305 连接,通过钳305进行夹持,起到夹持功能。
[0030]
仿生钳及驱动机构3仿生蟹腿蟹钳,可通过关节驱动舵机301、基节302、股节303、胫节304和钳305的相互配合实现各角度旋转移动。考虑到高寒地区恶劣的环境状况,为减少人力劳动,灵活的螃蟹仿生的仿生钳及驱动机构3,能够进行冻土碎块的夹持转移搬运工作。
[0031]
所述驾驶操控系统4包括驱动机构402;所述驱动机构402设置在转台及回转机构5内部,所述驱动机构402通过连接装置与转台及回转机构5底部的框架连接,驱动机构402的输出端分别与仿生钳及驱动机构3和行走底盘及驱动机构6传动连接。所述驾驶操控系统4还包括:驾驶室和外置阶梯401;驾驶室内设置座椅、方向盘、操控杆和控制界面;驾驶操控系统4与转台及回转机构5 的上车平台501连接。所述外置阶梯401位于转台及回转机构5外部,且机械臂及驱动机构2的一侧,外置阶梯401能够方便工作人员进行机器的修理拆卸。考虑到驾驶的舒适性,驾驶室的外壳采用弧形无死角玻璃将人的视野最大化,避免视觉死角。
[0032]
所述转台及回转机构5包括上车平台501、回转机构502和覆盖件503;所述上车平台501设置在行走底盘及驱动机构6上方,以支撑转台及回转机构5。所述上车平台501与所述回转机构502上端连接,上车平台501在回转机构502 的驱动下实现360
°
连续回转;需要指出的是,当上车平台501在回转机构502 的驱动下回转时,所述仿生钳及驱动机构3的关节驱动舵机301驱动股节303 带动胫节304整体以基节302为中心轴顺时针旋转,这样可以使动臂机构与可能的障碍物避开。所述回转机构502下端通过行走架602与行走底盘及驱动机构6连接,具体与行走底盘及驱动机构6的行走架602连接。上车平台501与机械臂及驱动机构2、仿生钳及驱动机构3和驾驶操控系统4固定连接,上车平台501能够对机械臂及驱动机构2、仿生钳及驱动机构3和驾驶操控系统4进行固定支撑。回转机构502位于覆盖件503内部起到连接上车平台501与行走架 602的作用以及带动上车平台501实现旋转功能的作用。所述覆盖件503设置在上车平台501上方,并通过结构框架与上车平台501固定连接,覆盖件503对回转机构502、行走底盘及驱动机构6与驱动机构402起到覆盖保护作用。
[0033]
本发明提供的行走底盘及驱动机构的结构示意图见图5。如图5所示,所述行走底盘及驱动机构6包括:行走架602;所述行走架602分为前段、中段和后段;所述行走架602的前段与中段活动连接,所述行走架602的中段与后段活动连接;所述行走架602的四角分别设置车轮601,所述行走架602的中段两侧分别设置履带机构;履带机构与车轮601为纵向并排关系,行走架602的前后轮分别位于履带机构的前后方。所述行走架602的前段和后段分别设置两个摆动液压缸607;所述摆动液压缸607的缸体通过转台及回转机构5中的液压装
置与驱动机构402连接获得驱动力,所述摆动液压缸607的活塞杆与行走架602 固定连接。车轮601与履带机构互相支撑固定连接,并通过摆动液压缸607的伸缩实现车轮601的贴地抬升或离地收放,以实现车轮601和履带机构的工作切换。
[0034]
所述履带机构包括:履带609、驱动轮605、引导轮608、行走马达606、支重轮603和履带架604;所述行走架602和转台及回转机构5通过回转支承连接,所述行走架602两侧的一端设置驱动轮605、另一端设置引导轮608;所述驱动轮605与行走马达606传动连接,通过油路与泵和驱动机构402连接获得动力;所述驱动轮605与引导轮608通过履带609连接;所述行走马达606与驾驶操控系统4传动连接;所述行走架602通过履带架604连接履带机构,履带架604采用钢制材料制成,结构稳定;所述履带架604内设置起到支重作用的支重轮603。本发明对履带机构的具体结构不做限定,其他可以与车轮601匹配并且能够实现履带式行走功能的结构可以作为替换。
[0035]
本发明考虑到不同地形路况,为了使破冻土机在不同路面安全平稳行驶,提供车轮601与履带机构结合的行走底盘及驱动机构6,通过摆动液压缸607带动车轮601贴地抬升或离地收放,实现轮履切换,以发挥不同方式的行走优势。履带机构用于复杂路况下安全行驶,车轮601用于公路快速机动以减少履带磨损。本发明采用轮履结合的行走方式,使轮履自由切换,二者结合可避免履带式底盘移动效率低的缺点保证移动的灵活性与高效性。
[0036]
本实施例提供的冲击振动式破冻土机的工作流程:由机械臂及驱动机构2 带动动力头机构1工作,当机械臂及驱动机构2移动时,动力头机构1随着移动到达指定位置进行冲击破碎工作。在冲击破碎中产生的冻土碎块可使用仿生钳及驱动机构3进行辅助转移搬运。机械臂及驱动机构2和仿生钳及驱动机构3 可自行转动,也可在回转机构502的带动下,随上车平台501与驾驶操控系统4 共同旋转;在行走过程中可根据不同地况选择使用履带机构或车轮601,二者切换由摆动液压缸607控制行走架602前后两段的车轮601的起降,实现切换。本发明提供的冲击振动式破冻土机,使用时通过机械臂及驱动机构2控制动力头机构1的位置,以最佳入射角进行冲击振动破碎冻土,仿生钳及驱动机构辅助进行冻土碎块转移搬运。
[0037]
本发明冲击振动式破冻土机针对我国冻土区广泛且施工严峻现状,解决了冻土施工效率低的问题,以冲击振动原理破碎冻土,经shpb与hjc模型分析与冲击试验,确定最有效冲击破碎方法。通过螃蟹仿生优化外形,履带式行走底盘及驱动机构保障安全行驶,机械臂与仿生钳减少人工劳动强度,驾驶室弧形玻璃避免视觉死角,内饰人机设计提高作业舒适度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1