一种路桥裂缝自动检测与修复一体化机器人的制作方法
1.本发明涉及路桥裂缝检测及修复技术领域,具体为一种路桥裂缝自动检测与修复一体化机器人。
背景技术:
2.现有的路桥裂缝的养护基本上靠人来辨别是否具有裂缝,这只能对表面已经显现的裂缝进行修复,而对于一些潜在的裂缝,却无法修复。且现在的养护手段基本上靠人,对于一些高架桥、隧道等危险地带,人工检修只能在固定的时间进行,不利于及时的修补裂缝。在现有公开的技术中,如公开号为:“cn110161047a”公开了一种路桥裂缝自动检测与修复一体化机器人,用于自动化检测和修复不平坦路面和桥面裂缝。其中机器人搭载图像采集模块进行裂缝检测,并在机器人末端搭载一款专用的裂缝修复末端执行器,可对不平坦路桥裂缝进行修复。本发明通过自动化的手段代替常规的人工检测和修复操作,提高修复效率,减少操作人员的安全隐患,具有自主导航、自主避障,自主检测裂缝并修复裂缝的功能,搭载图像采集模块进行裂缝检测,并在修复末端执行器上搭载测距传感器模块对不平坦裂缝进行测距,使其能适应不平坦路桥裂缝的修复,且利用图像采集模块进行修复效果和末端修复液注射情况的观察,通过观察到的情况控制末端修复执行器保证得到较好的修复效果。
3.上述公开了利用机械人替代人工,但是其采用的摄像头模组来进行裂缝检测,这种方式也只能获取已经显现的裂缝,而对于一些在路基里面的潜在的裂缝,却无法检测。当然,在现有公开的技术中,也有采用探伤仪来获取在路基里面的潜在裂缝,但是由于路基里面包含了大量的孔隙(由路基材料造成的,比如含有石子的沥青路基)探伤设备并不能很好的辨别这些孔隙和裂缝之间的差异。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种路桥裂缝自动检测与修复一体化机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种路桥裂缝自动检测与修复一体化机器人,包括机架,在机架的底部设置有驱动轮组,在机架的一侧设置有驱动系统,驱动系统用于在控制装置的控制下以带动驱动轮组转动;在机架的前侧设置有探伤组件;
7.在机架的上部设置有一基板,在基板上设置有修复一体机器人;
8.以及在机架的后侧,位于基板的一侧设置有换刀箱,在换刀箱内设置有修复设备以及换刀操控组件;
9.所述探伤组件具有多个脉冲探头,所述脉冲探头用于获取路基面的反射声波信号,将获取的反射声波信号输入至控制装置;
10.所述控制装置具有:
11.转化单元,获取反射声波信号将反射信号转化为模拟信号;
12.处理单元,基于模拟信号以获取模拟信号对应的幅值变化,基于幅值变化与基准幅值进行比对以获取幅值偏离状态,基于幅值偏离状态以获取裂缝状态,
13.执行单元,基于裂缝状态执行单元获取设置在控制装置内的修复预案,基于修复预案控制装置驱动修复一体机器人在换刀操控组件的操控下选择对应的修复设备对裂缝进行修复动作。
14.进一步地,所述探伤组件包括:在机架的前端设置有探伤组件固定座,在探伤组件固定座上设置有第一旋转电机,第一旋转电机的电机轴通过第一联轴器连接到第一内臂,第一内臂的的外侧设置有第一外臂,在第一外臂的前端设置有探伤仪,在探伤仪内设置有多个脉冲探头,在第一内臂处设置有第一驱动电机,该第一驱动电机用于驱动第一外臂的转动。
15.进一步地,所述修复一体机器人包括:设置在基板上的机器人固定座,在机器人固定座上设置有第二旋转电机,第二旋转电机的电机轴通过第二联轴器连接到第二内臂,第二内臂的的外侧设置有第二外臂,在第二内臂处设置有第二驱动电机,该第二驱动电机用于驱动第二外臂的转动,在第二外臂的前端设置有第三内臂,在第三内臂处设置有第三驱动电机,该第三驱动电机用于驱动第二外臂的转动,在第三内臂前端设置有轴臂,在轴臂的前端设置有固定基座,在固定基座上设置有第四内臂,在第四内臂的外侧设置有第四外臂,在第四内臂处设置有第四驱动电机,该第四驱动电机用于驱动第四外臂的转动,在第四外臂的前端设置第五旋转电机,在第五旋转电机的前端设置有换刀头,在换刀头上设置有对接螺纹柱。
16.进一步地,在所述机架的上设置有槽体,在槽体的底部设置有多组加热装置;所述槽体用于放置修复剂,加热装置用于将修复剂加热到设定温度;
17.所述槽体用于放置修复剂,加热装置用于将修复剂加热到设定温度;
18.在槽体的一侧设置有加压泵,该加压泵设置在修复管路上,所述修复管路一端接入至槽体内,末端设置在机架的后侧用于将修复剂导入至裂缝中,在修复管路的末端还设置有图像采集设备;
19.控制装置,设置在加压泵的一侧;以及
20.设置在机架前侧、后侧以及左右两侧分别设置有避障传感器,避障传感器与控制装置连接;
21.在机架的前侧设置有摄像系统,摄像系统、图像采集设备与控制装置连接。
22.进一步地,所述摄像系统用于获取前行的图像信息,控制装置基于图像信息来规划前行路径,所述避障传感器用于对前行路径进行实时纠正。
23.进一步地,所述修复设备包括:固定块,在固定块的上部设置有对接轴,在对接轴的中间部设置有对接螺纹孔;
24.在固定块下部设置有钻头或者震动棒或铁锹中的一种。
25.进一步地,所述换刀操控组件包括一组固定装置;
26.该固定装置具有驱动部,在驱动部的前部设置有固定爪,驱动部用于驱动固定爪前移将固定块进行固定;或驱动部用于驱动固定爪后移远离固定块。
27.进一步地,所述机架的后端设置有振动轮,该振动轮通过护板固定在机架上。
28.在本技术中,通过摄像系统实时获取前行的图像信息,控制装置接收到图像信息进行处理后来规划前行路径,并基于所述避障传感器用于对前行路径进行实时纠正,控制装置基于得到的规划好的前行路径来控制机械人的运动;在移动中,采用探伤仪的多个脉冲探头对路面进行扫描,以获取路基面的反射声波信号,将获取的反射声波信号输入至控制装置;控制装置获取反射声波信号后将反射信号转化为模拟信号;基于模拟信号以获取模拟信号对应的幅值变化,基于幅值变化与基准幅值进行比对以获取幅值偏离状态,基于幅值偏离状态以获取裂缝状态,基于裂缝状态执行单元获取设置在控制装置内的修复预案,基于修复预案控制装置驱动修复一体机器人在换刀操控组件的操控下选择对应的修复设备对裂缝进行修复动作。
29.在上述中,修复预案包含了多个,其基于裂缝状态进行对应的选择,比如获取的裂缝状态在路基的表面还是路基内部,裂缝状态是大致沿一个方向的缝隙还是纵横交错,是否包含了空洞等,其对应的修复预案是不相同的,不同的修复预案其对应执行的修复动作也是不相同的,比如,仅是在表面的大致沿一个方向的缝隙,只需要将修补剂填充的缝隙里面即可。如果里面具有空洞,其对应的修复动作是:控制装置通过控制命令引导修复一体机器人运动以换取钻头,并通过控制命令完成对空洞位置的钻孔,将空洞位置进行钻开暴露,然后再通过控制命令引导修复一体机器人运动以换取铁锹将空洞位置进行清理,清理完毕后通过修复管路将修复剂导入至裂缝中。必要时,还可以采用震动棒进行震动、以及振动轮进行压实。
附图说明
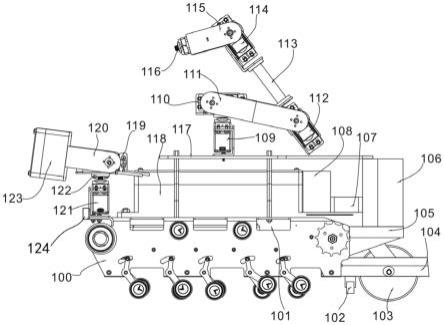
30.图1为本发明的结构示意图;
31.图2为本发明的修复设备和换刀操控组件的一种实施例示意图;
32.图3为本发明的控制系统原理图。
具体实施方式
33.以下结合附图对本发明进行详细的描述,参照图1至图3。
34.本发明提供了本发明提供了一种路桥裂缝自动检测与修复一体化机器人,包括机架100,在机架100的底部设置有驱动轮组,在机架100的一侧设置有驱动系统,驱动系统用于在控制装置107的控制下以带动驱动轮组转动;在机架100的前侧设置有探伤组件;
35.在机架100的上部设置有一基板117,在基板117上设置有修复一体机器人;
36.以及在机架100的后侧,位于基板117的一侧设置有换刀箱106,在换刀箱106内设置有修复设备以及换刀操控组件;换刀箱106的底部设置有支撑座105。
37.在所述机架100的上设置有槽体118,在槽体118的底部设置有多组加热装置101;
38.所述槽体118用于放置修复剂,加热装置101用于将修复剂加热到设定温度;
39.所述槽体118用于放置修复剂,加热装置101用于将修复剂加热到设定温度,该设定温度可以通过设置在槽体118内部的温度传感器进行测量;
40.在槽体118的一侧设置有加压泵108,该加压泵108设置在修复管路102上,作为优选的,槽体118的底部设置成倾斜状,在槽体118出料口一端设置有一电动阀门,当需要进行修复剂导入时,控制装置107控制电动阀门开启,修复剂滑入修复管路102内,经加压泵108
导入至末端。
41.所述修复管路102一端接入至槽体118内,末端设置在机架100的后侧用于将修复剂导入至裂缝中,在修复管路102的末端还设置有图像采集设备;
42.控制装置107,设置在加压泵108的一侧;以及
43.设置在机架100前侧、后侧以及左右两侧分别设置有避障传感器,避障传感器与控制装置107连接;
44.在机架100的前侧设置有摄像系统124,摄像系统124、图像采集设备与控制装置107连接。
45.进一步地,所述摄像系统124用于获取前行的图像信息,控制装置107基于图像信息来规划前行路径,所述避障传感器用于对前行路径进行实时纠正;
46.所述探伤组件具有多个脉冲探头,所述脉冲探头用于获取路基面的反射声波信号,将获取的反射声波信号输入至控制装置107;
47.所述控制装置107具有:
48.转化单元,获取反射声波信号将反射信号转化为模拟信号;
49.处理单元,基于模拟信号以获取模拟信号对应的幅值变化,基于幅值变化与基准幅值进行比对以获取幅值偏离状态,基于幅值偏离状态以获取裂缝状态,
50.执行单元,基于裂缝状态执行单元获取设置在控制装置107内的修复预案,基于修复预案控制装置107驱动修复一体机器人在换刀操控组件的操控下选择对应的修复设备对裂缝进行修复动作。
51.在一些实施例中,控制装置107连接到机器学习系统,该机械学习系统具有神经网络模型,在进行路面修复之前,可以通过探伤仪获取一定数量的反射声波信号,神经网络模型对获取到的反射声波信号进行迭代训练,在训练过程中,通过设置在神经网络模型的检测模块将反射声波信号中的异常信号筛选出,并通过剔除模块进行剔除,经过训练后就可以获取路基的基准反射声波信号,将基准反射声波信号转化成基准模拟信号后获取基准模拟信号对应的基准模拟信号幅值;将基准模拟信号幅值传输到控制装置107中进行存储以作为比对用的基准幅值。
52.在上述中,通过实现对路基进行探伤仪扫描,优选的,对多个路基表面平整完好的不同地方采集一定数量(一般不少于500组),可以获得不同路基正常的孔隙状态,通过对路基正常空隙状态的学习,能够精确的识别区别于路基正常空隙状态的其他裂缝情况。
53.在一些实施例中,通过摄像系统124实时获取前行的图像信息,控制装置107接收到图像信息进行处理后来规划前行路径,并基于所述避障传感器用于对前行路径进行实时纠正,控制装置107基于得到的规划好的前行路径来控制机械人的运动。具体的,在控制装置107内部设置有第一图像处理模块,该第一图像处理模块实时的对获摄像系统124获取的图像进行扫描检测,以检测是否具有障碍物或者路面坑洞,通过检测的结果来规划前行路径,同时基于在机架100前、后、左、右设置的避障传感器来对规划前行路径进行纠正,以实现机械人的自动行驶。在移动中,采用探伤仪的多个脉冲探头对路面进行扫描,以获取路基面的反射声波信号,将获取的反射声波信号输入至控制装置107;控制装置107获取反射声波信号后将反射信号转化为模拟信号;基于模拟信号以获取模拟信号对应的幅值变化,基于幅值变化与基准幅值进行比对以获取幅值偏离状态,基于幅值偏离状态以获取裂缝状
态,基于裂缝状态执行单元获取设置在控制装置107内的修复预案,基于修复预案控制装置107驱动修复一体机器人在换刀操控组件的操控下选择对应的修复设备对裂缝进行修复动作。
54.在一些实施例中,修复预案包含了多个,其基于裂缝状态进行对应的选择,比如获取的裂缝状态是在路基的表面还是路基内部,裂缝状态是大致沿一个方向的缝隙还是纵横交错,是否包含了空洞等,其对应的修复预案是不相同的,不同的修复预案其对应执行的修复动作也是不相同的,比如,仅是在表面的大致沿一个方向的缝隙,只需要将修补剂填充的缝隙里面即可。
55.在一些实施例中,当获取裂缝的状态后,基于裂缝状态执行单元获取设置在控制装置107内的修复预案,基于修复预案控制装置107在其内形成多个片段式的连续的控制命令,比如第一控制命令,与第一控制命令关联的第二控制命令,以及与第二控制命令关联的第三控制命令
……
;第一控制命令、第二控制命令以及第三控制命令形成一个连续的引导,比如,结合上述的描述,如果路基里面具有空洞,其对应的修复动作是:控制装置107通过第一控制命令引导修复一体机器人运动以换取钻头,并通过第二控制命令引导修复一体机器人带动钻头完成对空洞位置的钻孔,将空洞位置进行钻开暴露,然后再通过第三控制命令引导修复一体机器人运动以换取铁锹将空洞位置进行清理,清理完毕后通过修复管路102将修复剂导入至裂缝中。必要时,还可以采用震动棒进行震动、以及振动轮进行压实。
56.在上述中,在修复剂的导入过程中,可以还可以通过比如第四控制命令以驱动加压泵108对槽体118内施加压力以驱动修复剂能够从槽体118内导入到下部的裂缝中。以及控制装置107通过第五控制命令引导修复一体机器人运动以换取震动棒,对填充修复剂的位置进行捣实整理,在整个的修复过程中,图像采集设备用于实时的获取修复剂的导入状况图像,将导入状况图像输入至控制装置107,有控制装置107的第二图像处理模块扫描检测导入状况图像是否被足够填充;以此来控制增压泵的工作。
57.在一些实施例中,所述探伤组件包括:在机架100的前端设置有探伤组件固定座,在探伤组件固定座上设置有第一旋转电机121,第一旋转电机121的电机轴通过第一联轴器122连接到第一内臂119,第一内臂119的外侧设置有第一外臂120,在第一外臂的前端设置有探伤仪123,在探伤仪内设置有多个脉冲探头,在第一内臂处设置有第一驱动电机,该第一驱动电机用于驱动第一外臂的转动。在本实施例中,所述探伤组件实际上是三轴运动机器人,第一旋转电机具备360
°
旋转功能,可以通过联轴器带动第一内臂进行360
°
旋转,第一外臂沿第一内臂进行转动。
58.在一些实施例中,所述修复一体机器人包括:设置在基板117上的机器人固定座,在机器人固定座上设置有第二旋转电机109,第二旋转电机109的电机轴通过第二联轴器连接到第二内臂110,第二内臂的的外侧设置有第二外臂111,在第二内臂处设置有第二驱动电机,该第二驱动电机用于驱动第二外臂的转动,在第二外臂的前端设置有第三内臂112,在第三内臂处设置有第三驱动电机,该第三驱动电机用于驱动第二外臂的转动,在第三内臂前端设置有轴臂113,在轴臂113的前端设置有固定基座,在固定基座上设置有第四内臂114,在第四内臂114的外侧设置有第四外臂115,在第四内臂115处设置有第四驱动电机,该第四驱动电机用于驱动第四外臂的转动,在第四外臂的前端设置第五旋转电机116,在第五旋转电机的前端设置有换刀头,在换刀头上设置有对接螺纹柱。在本实施例中,修复一体机
器人是五轴运动机器人。和现有的五轴运动机器人技术一致,区别在于,在第四外臂的前端设置第五旋转电机,在第五旋转电机的前端设置有换刀头,在换刀头上设置有对接螺纹柱。
59.对应的,所述修复设备包括:固定块203,在固定块203的上部设置有对接轴206,在对接轴的中间部设置有对接螺纹孔207;对接螺纹孔和对接螺纹柱形成固定,
60.在固定块下部设置有钻头或者震动棒或铁锹中的一种。
61.所述换刀操控组件包括一组固定装置;
62.该固定装置具有驱动部204,在驱动部的前部设置有固定爪205,驱动部用于驱动固定爪前移将固定块进行固定;或驱动部用于驱动固定爪后移远离固定块。
63.所述机架100的后端设置有振动轮103,该振动轮通过护板104固定在机架100上。
64.在具体的换刀时,固定在换刀箱106内的驱动部(气缸)带动固定爪前移将固定块进行固定,然后引导控制修复一体机器人将对接螺纹柱与对接螺纹孔对中,然后在第五旋转电机转动的同时修复一体机器人向下提供移动位移匹配对接螺纹柱旋入至对接螺纹孔以完成换刀。
65.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本发明的方法及其核心思想。以上所述仅是本发明的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将发明的构思和技术方案直接应用于其它场合的,均应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1