一种轻型高兼容性肩部康复外骨骼
1.本发明属于外骨骼技术、医疗康复等领域,具体地说是一种轻型高兼容性肩部康复外骨骼,主要用于人体肩部运动助力、运动康复及运动能力检测等。
背景技术:
2.我国中风发病率世界第一,随着生活节奏和人口老龄化加快、生活压力增大,心脑血管及神经系统疾病造成的中风偏瘫患者逐年增加,其中约3/4患者有不同程度的神经损伤和功能运动障碍,严重影响生活质量。研究表明,中枢神经系统具有高度可塑性,对偏瘫患肢展开及时有效的康复训练,有助于恢复中枢神经对肢体运动的支配与控制,增强肌肉力量,重塑患肢运动功能,并有效预防肌肉萎缩,骨质疏松等并发症。但现有肩部康复外骨骼多采用电机、减速机直驱的三轴垂直正交的布局方式,体积大重量大,为避免人机干涉,将严重限制肩部外展的运动范围,同时重量大直接导致外骨骼只能固定在固定基座上,造成穿戴舒适性差;另一方面,上肢软体外骨骼解决了体积大、重量大等难题,但上肢软体外骨骼需要以人体肩部为支持,带动肘部、腕部等关节运动,增加肩部负担的同时,更无法对肩部运动提供有效助力,甚至造成二次伤害。
技术实现要素:
3.为了解决现有肩部康复外骨骼存在的上述问题,本发明的目的于提供一种轻型高兼容性肩部康复外骨骼。
4.本发明的目的是通过以下技术方案来实现的:
5.一种轻型高兼容性肩部康复外骨骼,包括三自由度球面肩部仿生机构、背部基座、绑带、拉力线、套管及背负系统,其中三自由度球面肩部仿生机构的一端固定在背部基座上,另一端与绑带相连,该背部基座上分别安装有动力模块、套管及背负系统,所述套管内穿设有拉力线,该拉力线的一端与动力模块连接,另一端接至所述三自由度球面肩部仿生机构各自由度的输出部,并通过所述绑带传递至人体大臂;所述背负系统将整个康复外骨骼依托在人体背部的腰部和双肩三个支撑点,完成康复外骨骼与人体背部的固定,并将康复外骨骼的自重传递到人体躯干;所述三自由度球面肩部仿生机构具有前伸后缩、外展内收及内旋外旋三个自由度,该三自由度球面肩部仿生机构穿戴在人体背部后,三个自由度的前伸后缩回转运动轴线、外展内收回转运动轴线及内旋外肇回转运动轴线分别与人体解剖学肩部外展内收关节轴线、内旋外旋关节轴线、前伸后缩关节轴线重合,复现人体肩部球窝结构,且所述前伸后缩回转运动轴线、外展内收回转运动轴线及内旋外肇回转运动轴线在初始状态相互垂直相交于球心,该球心始终与人体肩部关节运动中心重合。
6.所述三自由度球面肩部仿生机构包括肩部前伸后缩固定架、外展内收固定架、圆弧轨道转臂、外展内收驱动轮、内旋外旋驱动轮及位于该肩部前伸后缩固定架与外展内收固定架之间的两个球面菱形机构,其中每个球面菱形机构的四条边均为弧形,且相邻边均通过转轴转动连接,一个所述球面菱形机构的一个端点处的转轴安装于肩部前伸后缩固定
架的一端,相对的端点与另一个所述球面菱形机构的一个端点共用一根转轴,另一个所述球面菱形机构上相对的端点处的转轴安装于外展内收固定架上;所述肩部前伸后缩固定架的另一端连接有绑带,所述外展内收固定架安装于背部基座上;所述圆弧轨道转臂的一端固接有外展内收驱动轮,该外展内收驱动轮转动连接于所述外展内收固定架上安装的转轴一端,该外展内收固定架上安装的转轴的另一端固接有内旋外旋驱动轮;所述外展内收驱动轮、内旋外旋驱动轮及绑带分别通过拉力线与动力模块连接。
7.所述两个球面菱形机构包括第一肩部短杆、第二肩部短杆、第三肩部短杆、第四肩部短杆、第一肩部长杆及第二肩部长杆,该第一肩部长杆与第二肩部长杆呈“x”形,中间通过肩部中心轴转动连接;所述第一肩部短杆的一端与第一肩部长杆的一端通过第一肩部共用转轴连接,该第一肩部短杆的另一端与所述第三肩部短杆的一端通过前伸后缩转轴连接,所述第三肩部短杆的另一端与所述第二肩部长杆的一端通过第三肩部共用转轴连接,所述第二肩部短杆的一端与第一肩部长杆的另一端通过第二肩部共用转轴连接,该第二肩部短杆的另一端与第四肩部短杆的一端通过外展内收转轴连接,所述第二肩部短杆与第四肩部短杆中的一个与外展内收转轴固接,另一个为转动连接;所述第四肩部短杆的另一端与所述第二肩部长杆的另一端通过第四肩部共用转轴连接;所述第一肩部长杆及第二肩部长杆为两个球面菱形机构的共用杆;所述圆弧轨道转臂上开设有圆弧导向槽,所述前伸后缩转轴及肩部中心轴均由该圆弧导向槽中穿过,并通过轴承与圆弧轨道转臂转动连接;所述前伸后缩转轴与外展内收转轴分别转动连接于肩部前伸后缩固定架及外展内收固定架上,所述外展内收驱动轮与内旋外旋驱动轮分别位于外展内收固定架的两则,并位于所述外展内收转轴的两端,该外展内收驱动轮与外展内收转轴的一端转动连接,所述内旋外旋驱动轮与外展内收转轴的另一端固接。
8.所述肩部中心轴、前伸后缩转轴及外展内收转轴上分别安装有记录球面菱形机构各连杆在运动过程之中相对角度的编码器。
9.所述第一肩部长杆、第二肩部长杆的弧度相等,第一肩部短杆、第二肩部短杆、第三肩部短杆及第四肩部自短杆的弧度相等,该第一肩部长杆与第二肩部长杆的弧度是第一肩部短杆、第二肩部短杆、第三肩部短杆及第四肩部自短杆弧度的两倍。
10.所述第一肩部长杆与的第三肩部短杆、第四肩部短杆的曲率半径相同,所述第二肩部长杆与第一肩部短杆、第二肩部短杆的曲率半径相同。
11.所述第一肩部共用转轴、第二肩部共用转轴、第三肩部共用转轴、第四肩部共用转轴、肩部中心轴、前伸后缩转轴及外展内收转轴的回转运动轴线交汇于球心。
12.所述圆弧轨道转臂的两端均安装有用于固定套管的套管支撑点。
13.本发明的优点与积极效果为:
14.1.本发明创新设计了基于球面菱形机构的仿生肩关节,双球面菱形机构分布在人体肩部侧方,可有效避免大范围外展运动中外骨骼与人体头部干涉,具备较高的运动兼容性,大幅提升肩部运动灵活性。
15.2.本发明的球面肩部仿生机构为球面包裹结构,且结构简单、紧凑,重量轻,与人体肩部关节外部轮廓兼容性强,提升穿戴舒适性。
16.3.本发明可通过检测各构件运动夹角,实时获取人体肩部关节的运动数据,用于患者康复运动过程中关节运动能力检测。
附图说明
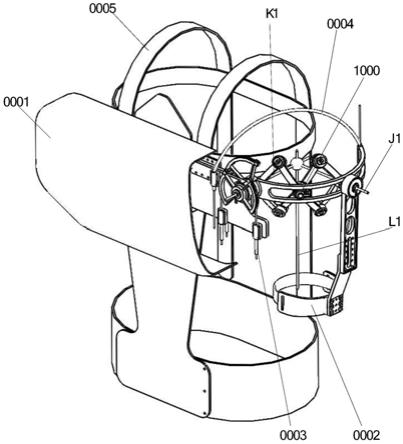
17.图1为本发明的立体结构示意图;
18.图2为本发明三自由度球面肩部仿生机构的立体结构示意图之一;
19.图3为本发明三自由度球面肩部仿生机构的立体结构示意图之二;
20.图4为本发明穿戴在人身体后的使用状态图;
21.其中:0001为背部基座,0002为绑带,0003为拉力线,0004为套管,0005为背负系统;
22.1000为三自由度球面肩部仿生机构,1001为第一肩部短杆,1002为第二肩部短杆,1003为第三肩部短杆,1004为第四肩部短杆,1005为第一肩部长杆,1006为第二肩部长杆,1007为肩部前伸后缩运动架,1008为外展内收固定架,1009为第一肩部共用转轴,1010为第二肩部共用转轴,1011为第三肩部共用转轴,1012为第四肩部共用转轴,1013为肩部中心轴,1014为前伸后缩转轴,j1为前伸后缩回转运动轴线,1015为外展内收转轴,k1为外展内收回转运动轴线,l1为内旋外旋回转运动轴线,1016为圆弧轨道转臂,1017为外展内收驱动轮,1018为内旋外旋驱动轮,1019为套管支撑点,1020为圆弧导向槽,m1为第一编码器,m2为第二编码器,m3为第三编码器,o为球心。
具体实施方式
23.下面结合附图对本发明作进一步详述。
24.如图1~4所示,本发明包括三自由度球面肩部仿生机构1000、背部基座0001、绑带0002、拉力线0003、套管0004及背负系统0005,其中三自由度球面肩部仿生机构1000的一端固定在背部基座0001上,另一端与绑带0002相连,该背部基座0001上分别安装有动力模块、套管0004及背负系统0005,套管0004内穿设有拉力线0003,该拉力线0003的一端与动力模块连接,另一端接至三自由度球面肩部仿生机构1000各自由度的输出部,动力模块通过拉力线0003及套管0004将运动和力传递至三自由度球面肩部仿生机构1000,并通过绑带0002传递至人体大臂;背负系统0005将整个康复外骨骼依托在人体背部,利用腰部和双肩三个支撑点完成康复外骨骼与人体背部的固定,并将康复外骨骼的自重传递到人体躯干。三自由度球面肩部仿生机构1000具有前伸后缩、外展内收及内旋外旋三个自由度,该三自由度球面肩部仿生机构1000穿戴在人体背部后,三个自由度的前伸后缩回转运动轴线j1、外展内收回转运动轴线k1及内旋外肇回转运动轴线l1分别与人体解剖学肩部外展内收关节轴线、内旋外旋关节轴线、前伸后缩关节轴线重合,复现人体肩部球窝结构,且前伸后缩回转运动轴线j1、外展内收回转运动轴线k1及内旋外肇回转运动轴线l1在初始状态相互垂直相交于球心o,该球心o始终与人体肩部关节运动中心重合。
25.三自由度球面肩部仿生机构1000包括肩部前伸后缩固定架1007、外展内收固定架1008、圆弧轨道转臂1016、外展内收驱动轮1017、内旋外旋驱动轮1018及位于该肩部前伸后缩固定架1007与外展内收固定架1008之间的两个球面菱形机构,其中每个球面菱形机构的四条边均为弧形,且相邻边均通过转轴转动连接,一个球面菱形机构的一个端点处的转轴安装于肩部前伸后缩固定架1007的一端,相对的端点与另一个球面菱形机构的一个端点共用一根转轴,另一个球面菱形机构上相对的端点处的转轴安装于外展内收固定架1008上;肩部前伸后缩固定架1007的另一端连接有绑带0002,外展内收固定架1008安装于背部基座
0001上;圆弧轨道转臂1016的一端固接有外展内收驱动轮1017,该外展内收驱动轮1017转动连接于外展内收固定架1008上安装的转轴一端,该外展内收固定架1008上安装的转轴的另一端固接有内旋外旋驱动轮1018;外展内收驱动轮1017、内旋外旋驱动轮1018及绑带0002分别通过拉力线0003与动力模块连接。
26.本实施例的两个球面菱形机构包括第一肩部短杆1001、第二肩部短杆1002、第三肩部短杆1003、第四肩部短杆1004、第一肩部长杆1005及第二肩部长杆1006,四个肩部短杆及两个肩部长杆均为弧形杆,且均向同一侧弯曲;第一肩部长杆1005与第二肩部长杆1006呈“x”形,中间通过肩部中心轴1013转动连接;第一肩部短杆1001的一端与第一肩部长杆1005的一端通过第一肩部共用转轴1009连接,该第一肩部短杆1001的另一端与第三肩部短杆1003的一端通过前伸后缩转轴1014连接,第三肩部短杆1003的另一端与第二肩部长杆1006的一端通过第三肩部共用转轴1011连接,第二肩部短杆1002的一端与第一肩部长杆1005的另一端通过第二肩部共用转轴1010连接,该第二肩部短杆1002的另一端与第四肩部短杆1004的一端通过外展内收转轴1015连接,第二肩部短杆1002与第四肩部短杆1004中的一个与外展内收转轴1015固接,另一个为转动连接;第四肩部短杆1004的另一端与第二肩部长杆1006的另一端通过第四肩部共用转轴1012连接;第一肩部长杆1005及第二肩部长杆1006为两个球面菱形机构的共用杆,其余四个肩部短杆之间以及肩部短杆与肩部长杆之间均通过相同的方式连接,即采用转轴转动连接,各个转轴均通过轴承与肩部短杆或肩部长杆完成连接;圆弧轨道转臂1016上开设有圆弧导向槽1020,前伸后缩转轴1014及肩部中心轴1013均由该圆弧导向槽1020中穿过,并通过轴承与圆弧轨道转臂1016转动连接,进而可在圆弧导向槽1020内移动;圆弧轨道转臂1016的两端均安装有用于固定套管0004的套管支撑点1019。前伸后缩转轴1014与外展内收转轴1015分别转动连接于肩部前伸后缩固定架1007及外展内收固定架1008上,外展内收驱动轮1017与内旋外旋驱动轮1018分别位于外展内收固定架1008的两则,并位于外展内收转轴1015的两端,该外展内收驱动轮1017与外展内收转轴1015的一端转动连接,内旋外旋驱动轮1018与外展内收转轴1015的另一端固接。本实施例在外展内收转轴1015上安装第一编码器m1,在肩部中心轴1013上安装第二编码器m2,在前伸后缩转轴1014上安装第三编码器m3,通过三个编码器记录球面菱形机构各连杆在运动过程之中相对角度。
27.本实施例的第一肩部长杆1005、第二肩部长杆1006的弧度相等,第一肩部短杆1001、第二肩部短杆1002、第三肩部短杆1003及第四肩部自短杆1004的弧度相等,该第一肩部长杆1005与第二肩部长杆1006的弧度是第一肩部短杆1001、第二肩部短杆1002、第三肩部短杆1003及第四肩部自短杆1004弧度的两倍。第一肩部长杆1005与第三肩部短杆1003、第四肩部短杆1004的曲率半径相同,第二肩部长杆1006与第一肩部短杆1001、第二肩部短杆1002的曲率半径相同。
28.本实施例的第一肩部共用转轴1009、第二肩部共用转轴1010、第三肩部共用转轴1011、第四肩部共用转轴1012、肩部中心轴1013、前伸后缩转轴1014及外展内收转轴1015的回转运动轴线交汇于球心o。穿戴后前伸后缩转轴回转运动轴线j1与人体肩部关节前伸后缩关节轴线重合,外展内收转轴回转运动轴线k1与人体前伸后缩关节轴线重合,内旋外旋回转运动轴线l1与人体肩部关节内旋外旋关节轴线重合,且初始状态下三个前伸后缩转轴回转运动轴线j1、外展内收转轴回转运动轴线k1及内旋外旋回转运动轴线l1相互垂直相交
于球心o,球心o始终与人体肩部关节运动中心重合。
29.本实施例的内旋外旋驱动轮1018上连接两根拉力线0003,外展内收驱动轮1017及肩部前伸后缩运动架1007各连接一根拉力线0003,四根拉力线分别与四个动力模块连接,由四个动力模块分别驱动,实现三自由度球面肩部仿生机构1000完成三自由度运动。动力模块不局限于固定在背部基座0001上,也可以固定于其他基座。本实施例的动力模块、拉力线均为现有技术,可采用于2019年7月2日公开、公开号为cn109953867a、发明名称为“一种轻量型多自由度仿生柔性外骨骼式上肢助力机器人”中公开的“套索驱动单元”。
30.本发明的背负系统0005为现有技术,可为背带、腰带。
31.本发明的工作原理为:
32.在人体穿戴上康复外骨骼后,动力模块通过拉力线0003分别驱动内旋外旋驱动轮1018带动外展内收转轴1015转动,外展内收驱动轮1017带动三自由度球面肩部仿生机构1000运动,绑带0002运动,第二肩部短杆1002与第四肩部短杆1004中的一个与外展内收转轴1015固接,另一个为转动连接,因此当内旋外旋驱动轮1018带动外展内收转轴1015转动时,外展内收转轴1015带动与其固接的第二肩部短杆1002或第四肩部短杆1004运动,而另一个转动连接的第四肩部短杆1004或第二肩部短杆1002由由外展内收驱动轮1017带动运动。两个球面菱形机构在运动过程中,前伸后缩转轴1014及肩部中心轴1013在圆弧导向槽1020中移动。
33.第二编码器m2记录的角度φ2为第一肩部长杆1005与第二肩部长杆1006之间的夹角,第一编码器m1记录的角度φ1为第二编码器m2检测角度的一半(即)与球面菱形机构整体外展内收角度之和,第三编码器m3记录的角度φ3为第二编码器m2检测角度的一半(即)与球面菱形机构整体前伸后缩角度之和;根据球面菱形机构中肩部短杆、肩部长杆的弧度α、球面菱形机构对称性及球面三角余弦定理得到关节角度识别算法包括:
34.肩部内旋外旋角度为
35.肩部外展内收角度为
36.肩部前伸后缩角度为
37.通过实时记录球面菱形机构中肩部短杆、肩部长杆在运动过程之中相对角度,并利用关节角度识别算法可实时获取人体肩部关节的运动数据。
38.本发明基于球面菱形的肩部仿生机构具有球面包裹结构,与人体肩部关节外部轮廓兼容性强;球面机构分布在人体肩部关节外侧,可有效避免传统外骨骼大范围外展内收运动中人机干涉,提升运动兼容性;同时基于拉线与套管的力与运动传递方式,大幅降低外骨骼执行机构重量,便于患者康复训练过程中的可穿戴性,大幅提升肩部康复外骨骼的运动灵活性与穿戴舒适性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1