液压张紧装置的制作方法
1.本发明涉及一种液压张紧装置和相关方法。
背景技术:
2.除其他任务之外,张紧器通常用于拉伸诸如螺栓或螺柱等的物件,使得螺纹螺母可随后沿拉伸的螺栓向下运行,从而在拉伸的螺栓中捕获张紧力。通常,它们用于需要通过使用螺纹紧固件来固定大负载的任何领域;一种常见的用途是在风力涡轮机中,当这种张紧器可以用来将许多紧固件诸如涡轮机叶片固定到它们的轴承或者这种涡轮机的塔架固定到其基座时等。
3.在我们先前的pct专利申请wo 2015/118283中,我们讨论了期望知道螺纹构件的伸长率,特别是在螺母在螺纹构件上的附接的可追溯性是重要的情况下,诸如在以上讨论的风力涡轮机的示例中。虽然在某种程度上有可能通过使用被引入到压力空间中的液压流体的压力结合螺栓的材料尺寸和特性来计算螺纹构件的伸长率,然而这不是特别可靠的措施。在该在先申请中,我们讨论了提供测量工件延伸的线性位移传感器。
4.液压张紧器在本领域中是熟知的;相同的示例可以在以ep 2522465公开的欧洲专利申请中以及在以jp 3-204406公开的日本专利申请中看到。这种张紧器可以用来拉伸螺纹构件,诸如螺柱、螺栓或类似物,并且总体上包括围绕螺纹构件放置的、内部和外部同轴的、总体上圆柱形的环形本体。内部本体螺纹接合螺纹构件。该内部本体与外部本体之间的空间限定压力空间,可以将流体(典型地液压流体)引入到该压力空间中以驱动本体沿着它们的共用轴线分开。
5.这种张紧器的操作需要一定量的技术和经验,尤其是能够可靠地且可重复地张紧待拉伸的物品。所期望的是提供一种张紧器,当使用现有技术的张紧器来张紧物品时,该张紧器至少部分地改善了用户面临的问题,以便提供一种可重复的、可靠的并且可追踪的张紧。
技术实现要素:
6.根据本发明的第一方面,我们提供了一种用于张紧具有螺纹的螺纹构件的液压张紧装置,该液压张紧装置包括:
7.液压张紧器,该液压张紧器具有本体和用于液压流体的压力空间并且具有螺纹接合构件,该螺纹接合构件被布置成接合螺纹构件的螺纹并且在将液压流体引入到压力空间中时被推动离开本体以便张紧螺纹构件;
8.位移传感器,该位移传感器被布置成测量所述螺纹接合构件相对于基座的线性位移,并且提供线性位移的输出指示;
9.旋转传感器,该旋转传感器被布置成确定在螺纹构件上旋转的螺母的旋转,并且旋转传感器被布置成产生螺母的旋转角度的输出指示;以及
10.控制单元,该控制单元被布置成将位移传感器和旋转传感器的输出作为输入,并
且从位移传感器的输出来确定螺母的所需的旋转角度,该所需的旋转角度适应由于被液压张紧器张紧的螺纹构件的延伸。
11.这样,通过监测位移(并且因此监测螺纹构件延伸),可以确定螺母应当旋转多少以适应螺纹构件的延伸。
12.通常,控制单元还将被布置成将由旋转传感器的输出指示的螺母的旋转与所需的旋转角度进行比较,以确定螺母是否已经充分旋转以适应螺纹构件的延伸。
13.该装置可提供有螺母旋转指示器;控制单元可被布置成在确定螺母已充分旋转时利用螺母旋转指示器提供指示。螺母旋转指示器可以是二进制指示器,因为它仅具有两种状态——已经达到目标螺母旋转以及没有达到目标螺母旋转。
14.因此,当螺母已经正确旋转时可以通知用户,并且因此可以适当地释放压力空间中的任何压力。
15.典型地,该装置将提供有压力传感器,该压力传感器被布置成用于确定压力空间内的流体压力并且提供压力的输出指示。控制单元可提供有用于期望的螺纹构件负载的输入,诸如螺纹构件负载系数等。控制单元可以被布置成基于所期望的螺纹构件负载来确定目标压力。控制单元可进一步被布置成将由压力传感器的输出所指示的压力与目标压力进行比较,以确定是否已经达到目标压力。控制单元可以被布置成使得:当由压力传感器的输出指示的压力至少是目标压力并且由压力传感器的输出所指示的压力的减小速率小于阈值时,则控制单元才确定已经达到目标压力。
16.该装置还可以提供有目标压力指示器,其中控制单元被布置成当已经确定已经达到目标压力时利用目标压力指示器向用户提供指示。目标压力指示器可以是二进制指示器,因为其仅具有两种状态——已经达到目标压力以及没有达到目标压力。
17.因此,当已经安全地达到正确的压力时可以通知用户,并且使得螺母然后可以旋转以捕获螺纹构件中的张紧力。另外,该装置可以提供有目标压力值指示器,该目标压力值指示器可以典型地数字地指示目标压力。
18.控制单元可被布置成将在压力空间中的压力已被释放之后由位移传感器的输出所指示的位移与期望的或预定的残余位移进行比较。
19.旋转传感器可以直接感测螺母的旋转。可替换地,该装置可以包括齿轮箱,齿轮箱具有被布置成驱动螺母的输出端和由驱动设备(通常是用户操作的)驱动的输入端,旋转传感器感测齿轮箱的一部分(通常是直接耦接到齿轮箱的输入端的齿轮)的旋转。
20.该装置还可包括扭矩传感器,该扭矩传感器被布置成测量施加到螺母的扭矩。虽然扭矩传感器可以直接测量施加到螺母的扭矩,但是扭矩传感器通常将测量施加到齿轮箱的一部分的扭矩,通常是输入端,并且可以经由齿轮箱减速比计算螺母处的扭矩。
21.该装置可提供有耦接到控制单元的存储器,由此控制单元可将由压力传感器、旋转传感器和位移传感器的输出分别指示的压力、旋转和位移的值存储在存储器中。这有助于可追溯性。它还可以将由扭矩传感器的输出指示的扭矩的值存储在存储器中。
22.根据本发明的第二方面,我们提供了一种张紧具有螺纹的螺纹构件的方法,在该螺纹上有负载保持螺母,该方法包括:
23.使螺纹构件的螺纹与液压张紧器的螺纹接合构件相接合,液压张紧器具有本体以及用于液压流体的压力空间,螺纹接合构件被布置成在将液压流体引入到压力空间中时被
推动离开本体,以便张紧螺纹构件;
24.使用位移传感器来测量螺纹接合构件相对于基座的线性位移;
25.使用旋转传感器来测量螺母的旋转角度;以及
26.由位移来确定螺母的所需的旋转角度,该所需的旋转角度适应由于被液压张紧器张紧的螺纹构件的延伸。
27.这样,通过监测位移(并且因此监测螺纹构件延伸),可以确定螺母应当旋转多少以适应螺纹构件的延伸。
28.该方法还可包括将由旋转传感器的输出所指示的螺母的旋转与所需的旋转角度进行比较,以确定螺母是否已充分旋转以适应螺纹构件的延伸。
29.该方法可以包括当已经确定螺母已经充分旋转时,提供螺母旋转指示。螺母旋转指示可以是二进制的,因为它仅具有两种状态——已经达到目标螺母旋转和没有达到目标螺母旋转。
30.因此,当螺母已经正确旋转时可以通知用户,并且因此可以适当地释放压力空间中的任何压力。
31.该方法可以包括使用压力传感器来确定压力空间内的流体压力。
32.该方法还可包括基于期望的螺纹构件负载确定目标压力。该方法可包括将流体压力与目标压力进行比较以做出是否已经达到目标压力的确定。该方法可以包括:仅当由压力传感器的输出所指示的压力至少为目标压力时并且当由压力传感器的输出所指示的压力的减小速率小于阈值时,才确定已达到目标压力。
33.该方法还可包括提供已确定已达到目标压力的目标压力指示。目标压力指示可以是二进制的,因为它仅具有两种状态——已经达到目标压力以及没有达到目标压力。
34.因此,当已经安全地达到正确的压力时可以通知用户,并且使得螺母然后可以旋转以捕获螺纹构件中的张紧力。另外,该方法可以包括典型地数字地指示目标压力。
35.该方法可以包括将压力空间中的压力已经被释放时的线性位移与期望的或预定的残余位移进行比较。
36.该方法可以包括在存储器中存储压力、旋转和线性位移的值。这有助于可追溯性。该方法还可以包括在存储器中存储扭矩的值。
附图说明
37.现在,仅通过举例的方式,参考附图来描述本发明的实施例的描述,在附图中:
38.图1示出了根据本发明的实施例的液压张紧器的立体图;
39.图2示出了图1的张紧器的剖视图;
40.图3示出了根据本发明的另一个实施例的替代张紧器的剖视图;
41.图4示出了图1的张紧器的齿轮箱;
42.图5示出了流程图,该流程图示出了图1的张紧器的操作;以及
43.图6示出了当图5的操作被执行时显示在图1的控制单元上的显示器。
具体实施方式
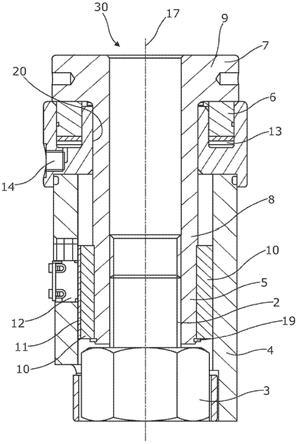
44.在附图中示出了根据本发明的实施例的液压张紧器1。该张紧器可以用于张紧并
且因此延伸螺栓或螺柱2形式的螺纹构件;螺母3然后可以沿着螺栓2向下运行以便捕获该张紧力。
45.该张紧器包括基座4,该基座形成了用于张紧器的壳体并且将抵靠在固定表面。张紧器还包括活塞6,该活塞6可以穿过孔20沿着中心轴线17相对于基座4移动。
46.在基座4与活塞6之间限定了压力空间13。液压流体可以借助于端口14的系统引入到该空间中。通过这样做,可以迫使活塞6远离基座4;在图的意义上,活塞6将沿着轴线17竖直地移动。
47.活塞6具有与轴线17同轴的中心通孔20。在这个孔20中提供了螺纹接合构件7。这个螺纹接合构件7包括圆柱形套筒形式的本体部分8,该本体部分8装配在孔20内。套管的内部限定了螺纹孔30,该螺纹孔30接合螺纹构件2。
48.螺纹接合构件7具有定位在本体部分8的端部处的活塞接合部分9。活塞接合部分9形成凸缘形式的突出部,该突出部邻接活塞6,使得由被推动远离基座4的活塞6产生的力被传递至活塞接合部分9,通过本体部分8,然后通过螺纹孔20到达螺纹构件2。然后,螺母3可以沿着螺纹构件2向下运行,以保持构件2处于张紧状态,并且一旦由于压力空间13中的流体引起的张紧力已经被释放,就引起螺母3压靠在固定表面。
49.然而,期望能够测量螺纹构件2的伸长率。为了能够这样做,围绕螺纹接合构件7的本体部分8的外表面5提供了套筒10。套筒10具有与轴线17同轴的圆柱形外壳的形式。套筒10相对于螺纹接合构件7是自由旋转的,但是套筒10通过从外表面5突出的保持环27被保持为抵抗沿着轴线17的线性移动。
50.该套筒10沿其长度承载磁性编码器条11,磁性编码器条11安装在套筒10的外表面中的凹部21中。磁性编码器为磁极的图案的形式,从而产生从套筒10轴向向外突出的磁场图案。磁性编码器11的长度平行于轴17被对准。
51.这些磁场可由安装在基座4中的磁性传感器12读取,磁性传感器12通常为霍尔效应传感器。磁性传感器12借助于夹具18相对于基座4固定。当螺纹构件2延伸时,磁性编码器11将移动经过磁性传感器12;通过适当处理传感器12的输出,将有可能测量螺纹接合构件7相对于基座4的移动并且由此确定螺纹构件2的伸长率。在最简单的情况下,测量可涉及在磁极经过的磁场的反转的简单计数,但技术人员将理解,存在对位置进行磁性编码的多种方式。
52.因为编码器被安装在螺纹接合构件7的本体8的下方,由于张紧器1的部件(诸如螺纹接合构件等)的弹性伸长,较少的误差被引入测量中。可以看出,磁性编码器11装配在本体部分8的与螺纹构件接合的部分上,并且因此通过在该点处测量,这些误差可以被最小化。
53.在许多方面,迄今为止所描述的实施例类似于在我们的早期pct申请中如wo 2015/118283公开的所描述的实施例,并且参考该公开以便进一步参考线性位移传感器的功能。
54.可替代地,张紧器可以是拉杆式张紧器,如附图的图3中所示,其中,拉杆50与螺柱(未示出)接合,并且随着拉杆50移动的套筒52上的磁性编码材料条51(以与套筒10与螺纹接合构件7一起移动并承载磁性编码器11相同的方式)随着活塞的移动使拉杆50(并且因此螺柱)相对于基座54移动而被固定到张紧器的基座54的磁场传感器53感测。
55.此外,液压张紧器包括不同的其他传感器,这些传感器如以下所述来使用。
56.提供了压力传感器60,该压力传感器60测量被引入到压力空间13中的流体的压力。
57.提供了齿轮箱61,在附图的图4中更详细地示出,该齿轮箱61具有耦接到输入齿轮63的输入端62(具有方形棘轮驱动插座的形式)。输入齿轮63耦接至输出齿轮64,该输出齿轮64被布置成使螺母3旋转。输入齿轮63承载磁性旋转编码器65,磁性旋转编码器65经过磁性传感器66。这样,磁性传感器66提供指示螺母3已经转动经过的角度的输出。
58.扭矩传感器70设置成耦接到齿轮箱61的输入端62。这提供了施加到其输入端71的扭矩的测量,该输入端71也是方形棘轮驱动输入端。因此,用户可以将方形棘轮驱动施加到输入端71,该输入端71将使用户施加的扭矩和旋转传递到齿轮箱61(测量所施加的扭矩),齿轮箱61进而将扭矩和旋转施加到螺母3(测量所施加的旋转)。
59.控制电路80获取所有上述传感器12、60、66、71的输出,并如下所述处理它们。虽然在图1中控制电路80被示出为带有屏幕82和按钮81的固定到张紧器上的单元,但控制电路80同样可以使用任何通用目的或个人计算机来实施,在这种情况下,显示可以在该计算机的显示器上。控制单元还将包括存储器以存储测量的值。
60.该数据的收集允许改进的接头张紧的可追溯性和可重复性。通过遵循以下阐述的方法,该装置可以向用户提供反馈而不是依赖于猜测。
61.图5示出了由控制单元80执行的方法的流程图,并且图6示出了在屏幕82上显示的样本显示。
62.在步骤100中,用户例如通过选择目标残余螺栓应力(在所示示例中为60%)来选择期望的螺栓负载。在步骤102中,控制单元80计算所需液压压力。这可以使用用于特定张紧器的查找表来计算。这在屏幕82上显示,如200处所示。
63.然后在步骤104,用户将张紧器相对于螺柱2和螺母3固定到位。在步骤106,控制单元80记录压力、线性位移、旋转和扭矩的值并且将这些值记录为标称基准值。
64.然后,用户(在步骤108)使用液压压力源来对压力空间13加压。然后,将建立压力空间13中的压力,并且将连同目标压力一起在屏幕82上显示该压力(步骤110,显示器201)。如果液压压力达到目标,然后在30秒内以不大于3巴(bar)/秒的限度衰减,则控制单元确定已经稳定地达到目标压力(步骤112)。该确定在显示器202中被示出给用户,作为旋转螺母3(显示器202)连同原始计算的目标延伸和已实现的延伸(两者均在步骤116处存储在存储器中)的指示;如果所实现的延伸显著小于所预测的,则建议用户再次开始(显示器206)。
65.如果液压压力没有达到该目标或者衰减得比限度快,则建议用户再次开始(显示器203)。
66.假设已经稳定地达到目标压力,用户使用扭矩传感器70的输入端71旋转螺母3(步骤114)。控制单元80从由位移传感器12测量的线性位移的变化和螺柱2上的螺纹的螺距确定螺母3的所需旋转角度。这在显示器204中被显示给用户。
67.一旦用户达到目标旋转角度(步骤118),就指示用户释放液压压力(显示器205);如果用户未实现预期旋转,则建议用户在显示器207处再次开始。压力释放由控制单元80检测为在阈值速率(例如,500巴/秒)以上的压力的急剧减小。一旦发生这种情况并且压力已经下降到初始压力(在此,1巴),由线性位移传感器12测量的残余延伸量被记录在存储器中
(步骤120)并且被显示在显示器208处,并且用户可以移除张紧器。然而,如果实际残余延伸量显著小于预期,则建议用户在显示器209处再次开始。
68.因为通过程序逐步建议用户并记录各种参数,张紧变得更加可追踪——因为它会自动记录每个螺母3已经旋转了适当的量——并且是可重复的,因为控制单元80自动地为用户确定正确的旋转等,而不是用户每次必须依赖于他们的经验或相同的标称旋转。因此,可以增加张紧的质量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1