一种仿真人机器人人头的制作方法
1.本发明涉及机器人技术领域,尤其涉及仿生机器人技术领域,具体涉及一种便携式的可以对话的模仿真人动作的机器人人头结构。
背景技术:
2.现在市面上的机器人的研究和应用大部分集中于工业领域,近年国内仿人表情机器人的研发工作在进入21世纪之后才陆续出现,以哈尔滨工业大学为代表,表情机器人研究在最近十几年发展迅速。服务机器人若能实现一些基本的头部和面部动作,比如眨眼、张嘴说话、摇头灯,将更容易获得人们的喜爱,从而给人更多的情感交互。因此,仿生机器人越来越得到人们的重视,具有很好的发展前景。
技术实现要素:
3.本发明的目的提供一种仿真人机器人人头,旨在解决现有技术结构复杂的问题。
4.为了实现上述目的,本发明采用的技术方案如下:一种仿真人机器人人头,包括眼皮驱动机构、眼球左右驱动机构、眼球上下驱动机构、下颚驱动机构、头左右驱动机构、头皮、前壳、后壳、底壳、六角螺母、主板电路板、电源电路板、触摸电路板、麦克风、喇叭、a电池、b电池、触摸片,a电池单独给所有舵机供电,b电池给电路板供电;眼皮驱动机构包括前支架、上眼皮、连杆,摆杆、舵机、下眼皮;眼球左右驱动机构包括眼球、眼球、球连杆、舵机;眼球上下驱动机构包括主支架、滑动支架、连杆、摆杆;下颚驱动机构包括主支架、下颚、舵机支架、舵机、轴套、螺杆、支架、定位器、轴、螺丝、卡簧,定位器控制舵机的转动;头左右驱动机构包括主支架、螺纹杆、齿轮、齿轮、轴承,卡簧,舵机;所述的仿真人机器人人头在左右两个耳朵处设有麦克风,在后脑勺处设有出音孔,与身体的连接处设有六角螺母,在底部靠近后脑勺的地方设有电源开关、充电插座、充电指示灯和轻触开关,在头皮与前壳的中间或者头皮与下颚的中间设有触摸片;所述的头皮在两个耳朵处设有通孔,在后脑勺处设有通孔,在内表面前额处、下巴处和通孔附近处设有卡位;所述的前壳在耳朵处设有走线孔,与头皮上的通孔对应,在前额处和走线孔附近设有凹槽,与头皮上的卡位对应;所述的后壳在后脑勺处设有阵列的出音孔,在出音孔附近设有凹槽,与头皮上的卡位对应;所处的下颚在一侧设有凹槽,此凹槽边上设有两个螺丝柱,在底部设有凹槽,与头皮上的卡位对应;所述的主电路板80检测a电池和b电池的电量快要耗尽前,驱动上眼皮闭眼,提示电池
需要充电。
5.具体地,前支架设有两个内凹球面和内凹圆柱面,并且内凹球面的球心在圆柱面的轴线上;上眼皮设有两个内凹球面、圆柱面和支撑,并且内凹球面的球心在圆柱面的轴线上;下眼皮设有两个内凹球面和圆柱面,内凹球面的球心在圆柱面的轴线上。
6.具体地,两个眼球、球连杆和前支架组成一个平行四边形的双摇杆机构,这个平行四边形机构在整个机构中又可以相对于前支架上下摆动,在摆动的过程中眼球与眼球始终是相互平行的。
7.具体地,球连杆设有圆柱面。
8.具体地,主支架设有两个竖向排列的相距不远的螺丝柱和扁位孔。
9.具体地,滑动支架设有叉形支撑和凹槽。
10.具体地,轴一端设有扁位,另一端设有扁位,设有螺丝孔垂直扁位。
11.具体地,上眼皮的内凹球面、下眼皮的内凹球面和前支架的两个内凹球面一起包住两个眼球。
12.具体地,松开螺丝,旋转支架,就可以调整下颚与主支架的相对初始角度。
13.本发明的有益效果是:设计了一种仿真人机器人人头,结构简凑,自带电池,便携性好,降低了产品成本。
附图说明
14.图1为本实施例的主体正面示意图。
15.图2为本实施例的主体侧面示意图。
16.图3为本实施例的主体后面示意图。
17.图4为本实施例的主体底面示意图。
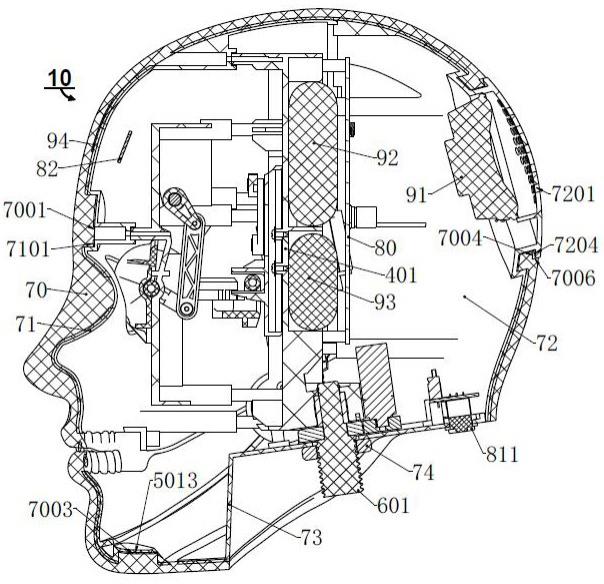
18.图5为本实施例的主体侧面剖面示意图。
19.图6为本实施例的主体爆炸示意图。
20.图7为本实施例的眼皮驱动机构+眼球左右驱动机构+眼球上下驱动机构示意图。
21.图8为本实施例的眼皮驱动机构+眼球左右驱动机构+眼球上下驱动机构的爆炸示意图。
22.图9为本实施例的眼皮驱动机构+眼球左右驱动机构+眼球上下驱动机构的剖面示意图。
23.图10为本实施例的眼皮驱动机构示意图。
24.图11为本实施例的眼皮驱动机构爆炸示意图。
25.图12为本实施例的眼球左右驱动机构示意图。
26.图13为本实施例的眼球左右驱动机构爆炸示意图。
27.图14为本实施例的眼球上下驱动机构示意图。
28.图15为本实施例的眼球上下驱动机构剖面示意图。
29.图16为本实施例的眼球上下驱动机构爆炸示意图。
30.图17为本实施例的下颚驱动机构示意图。
31.图18为本实施例的下颚驱动机构爆炸示意图。
32.图19为本实施例的头左右驱动机构示意图。
33.图20为本实施例的头左右驱动机构爆炸示意图。
34.图21为本实施例的电源电路板示意图。
35.图22为本实施例的头皮剖面示意图。
36.图23为本实施例的前壳示意图。
37.图24为本实施例的下颚示意图。
38.图25为本实施例的轴示意图。
具体实施方式
39.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
40.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或间接在该另一个元件上。当元件被称为“连接于”另一个元件,它可以是直接连接在另一个元件或间接连接至该另一个元件上。
41.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明或简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造或操作,因此不能理解为对本发明的限制。
42.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包含一个或更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另外有明确具体的限定。
43.参照图1、图2、图3、图4、图5、图6,仿真人机器人人头10包括眼皮驱动机构20、眼球左右驱动机构30、眼球上下驱动机构40、下颚驱动机构50、头左右驱动机构60、头皮70、前壳71、后壳72、底壳73、六角螺母74、主板电路板80、电源电路板81、触摸电路板82、麦克风90、喇叭91、a电池92、b电池93、触摸片94,a电池92单独给所有舵机供电,b电池93给电路板供电。
44.参照图7、图8、图9、图10、图11,眼皮驱动机构20包括前支架201、上眼皮202、连杆203,摆杆204、舵机205、下眼皮209。
45.参照图7、图8、图9、图12、图13,眼球左右驱动机构30包括眼球301、眼球302、球连杆303、舵机304。
46.参照图7、图8、图9、图14、图15、图16,眼球上下驱动机构40包括主支架401、滑动支架402、连杆403、摆杆404。
47.参照图17、图18,下颚驱动机构50包括主支架401、下颚501、舵机支架502、舵机503、轴套504、螺杆505、支架506、定位器507、轴508、螺丝509、卡簧510,定位器507控制舵机503的转动。
48.参照图19、图20,头左右驱动机构60包括主支架401、螺纹杆601、齿轮602、齿轮603、轴承604,卡簧605,舵机606。
49.参照图21,电源电路板81包括电源开关811、充电插座812、充电指示灯813,轻触按
键814、印刷电路板815,连接器816。电源开关811带有开机指示灯,工作时灯亮。轻触按键814用于配置wifi。
50.参照图1、图2、图3、图4、图5、图6,仿真人机器人人头10的左右两个耳朵处设有麦克风90,用于拾取人与仿真人机器人人头10进行对话的声音。在后脑勺处设有出音孔7201,便于喇叭91播放人与仿真人机器人人头10进行对话的声音。在仿真人机器人人头10与身体的连接处设有六角螺母74,当螺纹杆601拧入身体,仿真人机器人人头10摆正后,向身体方向拧紧六角螺母74,防止螺纹杆601相对于身体出现转动,这样的话,仿真人机器人人头10左右转动两边的角度大致相同。在仿真人机器人人头10底部靠近后脑勺的地方设有电源开关811、充电插座812、充电指示灯813和轻触开关814。在头皮70与前壳71的中间或者头皮70与下颚501的中间设有触摸片94,本例优选在仿真人机器人人头10的前额处设有触摸片94,此触摸片94也可以设置于仿真人机器人人头的其他地方,如面颊或下巴等,用于人手触摸激活仿真人机器人人头10开始进行语音会话。人也可以直接说出唤醒词,通过麦克风90拾取唤醒词声音,主电路板80的分析处理,激活仿真人机器人人头10开始进行语音会话。在主电路板80和主支架401的中间夹有a电池92和b电池93,a电池92给仿真人机器人人头10里面的所有舵机单独供电,b电池93给所有电路板供电。
51.参照图5、图6、图22,头皮70由软胶制作而成,如硅胶等,它的外表面可以化妆或植毛发等处理,使仿真人机器人人头10看起来像真人模样。在两个耳朵处设有通孔7005,用于固定麦克风90。在后脑勺处设有通孔7006,便于喇叭91可以放出声音。在内表面前额处设有卡位7001,在内表面通孔7005附近设有卡位7002,在内表面下巴处设有卡位7003,在内表面通孔7006附近处设有卡位7004,这些卡位使得头皮70在安装后不会出现很大的错位。
52.参照图5、图6、图23,在前壳71的前额处设有凹槽7101,与头皮70上的卡位7001对应。在耳朵处设有走线孔7105,与头皮70上的通孔7005对应。在走线孔7105附近设有凹槽7102,与头皮70上的卡位7002对应。在嘴巴处设有牙齿7106。
53.参照图3、图5、图6,后壳72在后脑勺处设有阵列的出音孔7201,在出音孔7201附近设有凹槽7204,与头皮70上的卡位7004对应。
54.参照图5、图6、图17、图18、图24,下颚501在一侧设有凹槽5011,此凹槽5011边上设有两个螺丝柱5012。在底部设有凹槽5013,与头皮70上的卡位7003对应。在嘴巴处设有牙齿5014。
55.参照图7、图8、图9、图10、图11,前支架201设有两个内凹球面2011和内凹圆柱面2012,并且内凹球面2011的球心在圆柱面2012的轴线上。上眼皮202设有两个内凹球面2021、圆柱面2022和支撑2023,并且内凹球面2021的球心在圆柱面2022的轴线上。下眼皮209设有两个内凹球面2091和圆柱面2092,内凹球面2091的球心在圆柱面2092的轴线上。
56.参照图7、图8、图9、图12、图13,球连杆303设有圆柱面3031。
57.参照图7、图8、图9、图14、图15、图16,主支架401设有两个竖向排列的相距不远的螺丝柱4011和扁位孔4012。滑动支架402设有叉形支撑4021和凹槽4022。
58.参照图17、图18、图25,轴508一端设有扁位5081,另一端设有扁位5082,设有螺丝孔5083垂直扁位5082。
59.参照图1至图13,眼球301和眼球302放入到前支架201中,眼球301的球面和眼球302的球面分别与前支架201的两个内凹球面2011接触,上眼皮202的支撑2023插入到前支
架201的孔中,使得上眼皮202的两个内凹球面2021分别于眼球301的球面和眼球302的球面接触,上眼皮202上的圆柱面2022与前支架201上的圆柱面2012接触,下眼皮209把上眼皮202压在前支架201上,并被螺丝锁紧。下眼皮209的两个内凹球面2091分别与眼球301的球面和眼球302的球面接触,下眼皮209上的圆柱面2092与上眼皮202上的圆柱面2022接触。上眼皮202的内凹球面2021、下眼皮209的内凹球面2091和前支架201的两个内凹球面2011一起包住眼球301和眼球302。
60.由于眼球301和眼球302的作用,上眼皮202不可以轴向移动,上眼皮202与前支架201组成旋转副,眼球301和眼球302分别与前支架201组成球副。
61.连杆203连在上眼皮202和摆杆204,并用螺丝固定住,连杆203分别与上眼皮202和摆杆204组成旋转副。摆杆204套在舵机205的轴上,并用螺丝固定。舵机205固定在前支架201上,并用螺丝固定。
62.这样摆杆204、连杆203、上眼皮202和前支架201组成了一个双摇杆机构,舵机205驱动摆杆204摆动,进而驱动上眼皮202摆动。
63.眼球301套在舵机304的轴上并用螺丝固定,舵机304被螺丝固定在球连杆303上,球连杆303的孔套在眼球302的轴上,并用螺丝限制轴向移动,眼球302和球连杆303组成旋转副。
64.这样眼球301、球连杆303、眼球302和前支架201组成一个平行四边形的双摇杆机构,由于眼球301和眼球302在机构中是球副连接,这个平行四边形机构在整个机构中又可以相对于前支架201上下摆动。舵机304驱动眼球301摆动,进而驱动眼球302摆动,在摆动的过程中眼球301与眼球302始终是相互平行的。
65.参照图14、图15、图16,滑动支架402上的凹槽4022套住主支架401上的两个螺丝柱4011,并被两个螺丝406限制在主支架401上,滑动支架402与主支架401组成滑动副,这样滑动支架402可以在主支架401上上下滑动。舵机405固定在主支架401上,并用螺丝锁紧。摆杆404套在舵机405的轴上,并用螺丝固定。连杆403连接滑动支架402和摆杆404,并用螺丝限制,连杆403分别与滑动支架402和摆杆404组成旋转副。
66.这样摆杆404、连杆403、滑动支架402和主支架401组成一个曲柄滑块机构,舵机405驱动摆杆404摆动,进而驱动滑动支架402上下滑动。
67.参照图7至图16,滑动支架402上的叉形支撑4021叉住球连杆303的圆柱面3031,球连杆303与滑动支架402组成旋转副和滑动副,球连杆303与滑动支架402之间既可以相对转动,又可以相对滑动。前支架201用螺丝固定在主支架401上。
68.这样舵机405驱动滑动支架402上下滑动的时候,就可以驱动球连杆303上下移动,进而驱动眼球301和眼球302同时上下转动。
69.参照图17、图18,下颚501上的两个孔套在主支架401上的两个圆柱上,下颚501与主支架401组成旋转副。一侧用卡簧510卡住,轴508穿过下颚501一侧的凹槽5011,插入到主支架401上的扁位孔4012中,并用螺丝锁入轴508上的孔5083中,由于轴508的扁位5082的作用,轴508上的扁位5081在主支架401上的角度是固定的。把定位器507套在轴508上的扁位5081上,支架506塞入到下颚501的凹槽5011中,并用两颗螺丝509压住。松开螺丝509,旋转支架506,可以调节定位器507。舵机503装入到支架502中,并用螺丝固定。轴套504套在舵机503的轴上,并用螺丝锁紧。螺杆505旋转塞入到轴套504中,螺杆505与轴套504组成螺旋副。
支架502套在主支架401的圆柱上,并用螺丝限制,支架502与主支架401组成旋转副。螺杆505套在下颚501的圆柱上,并用螺丝限制,螺杆505与下颚501组成旋转副。电位器507检测下颚501的转动角度,控制舵机503的转动。
70.这样主支架401、轴套504、螺杆505、下颚501组成一个螺杆摇杆机构,舵机503驱动轴套504旋转,螺杆505与轴套504相对伸缩,螺杆505拉动下颚501上下旋转。松开螺丝509,旋转支架506,就可以调整下颚501与主支架401的相对初始角度。
71.参照图19、图20,轴承604塞入到主支架401的孔中,齿轮602套在螺纹杆601上,再塞入到轴承604孔中,在并用卡簧605卡住,螺纹杆601与主支架401组成旋转副。齿轮603套在舵机606的轴上,舵机606被螺丝固定在主支架401上,齿轮603和齿轮602组成齿轮副。
72.这样齿轮602,齿轮603、主支架401组成一个齿轮机构,舵机606驱动齿轮603转动,进而驱动主支架401绕着螺纹杆601左右转动。
73.参照图3至图6、图21,电源电路板81上的充电插座812、充电指示灯813、电源开关811、轻触开关814塞入到底壳73上的相应孔中,并用螺丝锁紧电源电路板81在底壳73上,触摸片94贴到前壳71的前额上,触摸电路板82固定到前壳71上,用导线连接触摸片94与触摸电路板82,两个麦克风90的导线穿过前壳71耳朵处的通孔7105,前壳71固定到主支架401上。a电池92和b电池93塞入到主支架401的槽中,贴上泡棉。盖上主电路板80,并用螺丝固定在主支架401上,连接触摸电路板82到主电路板80,连接电源电路板81到主电路板80,连接a电池92和b电池93到主电路板,连接所有舵机到主电路板80。喇叭91固定到后壳72上,连接喇叭91到主电路板80,盖上后壳72,并用螺丝固定在主支架401上,固定底壳73到主支架401上。
74.参照图1至图6、图22、图23、图24,仿真人机器人人头10从头皮70的底部套上头皮70 ,头皮70上的卡位7001卡入前壳71的凹槽7101中,卡位7002卡入前壳71的凹槽7102中,头皮70上的卡位7003卡入下颚501的凹槽5013中,卡位7004卡在后壳72的凹槽7204中,两个麦克风90塞入到头皮70上耳朵处的两个通孔7005中。拧入六角螺母74到螺纹杆601上。
75.打开电源开关811,主电路板80驱动所有舵机来回动作一遍,进行自检,同时进行联网,听到联网成功的提示音后,人可以通过触摸前额或说出唤醒词与仿真人机器人人头10进行对话,在仿真人机器人人头10放出声音的同时,会驱动下颚501等机构动作,模仿人的动作表情。
76.主电路板80检测a电池92和b电池93的电量快要耗尽前,驱动上眼皮202闭眼,所有舵机回到初始位置,提示电池需要充电。
77.仿真人机器人人头10可以与人进行语音对话,同时模仿人的动作表情,给给人一种鲜活的感觉,结构简凑,自带电池,便携性好,产品成本低。
78.以上仅为本发明的较佳实施例而已,并不用以限制本发明,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1