一种井下机器人的碳纤维防爆外壳的制作方法
[0001]
本发明涉及机器人领域,特别涉及一种井下机器人的碳纤维防爆外壳。
背景技术:
[0002]
矿井是形成地下煤矿生产系统的井巷、硐室、装备、地面建筑物和构筑物的总称。有时把矿山地下开拓中的斜井、竖井、平硐等也称为矿井。每一个矿井的井田范围大小、矿井生产能力和服务年限的确定,是矿井自体设计中必须解决好的关键问题之一。
[0003]
机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
[0004]
但是,矿井下的环境复杂,需要对机器人进行防爆设计,避免出现意外爆炸时对机器人造成破坏,为此,我们提出一种井下机器人的碳纤维防爆外壳来解决上述问题。
技术实现要素:
[0005]
本发明的主要目的在于提供一种井下机器人的碳纤维防爆外壳,可以有效解决背景技术中的问题。
[0006]
为实现上述目的,本发明采取的技术方案为:
[0007]
一种井下机器人的碳纤维防爆外壳,包括:机体,所述机体机器人的支撑主体结构,内部集成有用于控制设备的相关部件,所述机体的每个侧边均设置有两组缓冲杆,所述缓冲杆外侧设置有防护板,
[0008]
所述防护板包括外防护层和内结构层,所述外防护层内部设置有沉孔槽,所述沉孔槽内部转动安装有紧固螺栓,通过紧固螺栓将外防护层和内结构层进行连接,通过外防护层和内结构层的复合可以结合碳纤维和芳纶纤维的优势,可以进行定期的更换外防护层,且可以保证良好经济性。
[0009]
优选的,所述外防护层的芳纶纤维材料的注塑完成后无需进行表面加工,可以更好的保证结晶体的质量,从而提升外防护层的力学强度,所述外防护层右侧设置有涂层,所述涂层为石墨烯涂层,具有良好的散热能力。
[0010]
优选的,所述外防护层为碳纤维材质制成的碳板,碳纤维是一种含碳量在95%以上的高强度、高模量新型纤维材料,它的力学性能表现突出,具有各项异性的特点,碳纤维具有高强轻质、抗腐蚀、耐老化、物理性能稳定等极其优越的品质,但是该材料成本很高,表面容易被刮花,所述内结构层为芳纶材料制成的碳板,芳纶纤维除具有高强度、高弹性模量性能外,还有较高的耐热性能,常用的芳纶纤维为芳纶。
[0011]
优选的,所述防护板外侧设置有外侧包条,所述外侧包条为环形的橡胶垫,可以吸收能量,提升安全性,所述外侧包条中部设置有结构加强杆,所述结构加强杆为纵横分布的碳纤维杆,该产品结构分为纤维复合层+芳纶复合层+纤维复合层,充分发挥碳纤维复合材
料的耐候性、抗老化、轻量化、刚度提高等特性以及芳纶复合材料的较好的刚性性能等,可以有效阻止产品内部爆炸物的辐射状冲击,将爆炸冲击波和破片飞溅的伤害限制的筒体范围内,同时通过防爆产品壳体自身的吸能特性消除冲击能量,有效防止井矿爆炸危险,减少对于结构的稳定性高。
[0012]
优选的,所述机体底部设置有两组行走轮,所述行走轮外侧设置有大尺寸的防滑轮胎,提升机器人的通过能力,更好的适应平整性差的井下路况,所述机体下方前后两侧设置有防撞块,所述防撞块中部设施有毫米雷达波,对前后的障碍物进行扫描测距,当机体与障碍物的距离小于设定的安全距离会进行报警,通过防撞块发生碰撞来进行吸能,避免对机体造成损坏,从而可以提升机器人的耐用性。
[0013]
优选的,所述机体上方设置有存储腔,所述存储腔内为空腔结构,用于存放需要进行携带的工具,以及可以井下进行传递的货物,提升适用性。
[0014]
优选的,所述机体上方前侧设置有通信模块,所述通信模块内设置有信号输出和接收装置,用于将机体内的信息与基站进行互通,保证信息的交互,所述机体上中部设置有探照模组,所述探照模组为旋转的360
°
全息探照头,会不间断的机器人四周的环境进行录像,并将录像信息通过通信模块传递到基站经过处理器处理后发回指令信息形成对于路线的判断。
[0015]
优选的,所述防护板外侧设置有外侧包条,所述外侧包条为环形的橡胶垫,可以吸收能量,提升安全性,所述外侧包条中部设置有斜拉绳,所述斜拉绳为x形状的交错设计碳纤维杆,提升结构的抗斜拉能力,所述斜拉绳中部设置有固定块,用于对斜拉绳结构的固定,提升稳定性。
[0016]
与现有技术相比,本发明具有如下有益效果:
[0017]
1、该产品结构分为纤维复合层+芳纶复合层+纤维复合层,充分发挥碳纤维复合材料的耐候性、抗老化、轻量化、刚度提高等特性以及芳纶复合材料的较好的刚性性能等,可以有效阻止产品内部爆炸物的辐射状冲击,将爆炸冲击波和破片飞溅的伤害限制的筒体范围内,同时通过防爆产品壳体自身的吸能特性消除冲击能量,有效防止井矿爆炸危险,减少对于结构的稳定性高。
[0018]
2、所述缓冲杆外侧设置有防护板,通过防护板来对机器人四周进行结构的防护,所述缓冲杆中部设置有弹簧,可以让防护板在收到外力冲击时进行形变吸能,进一步减少对于机体本体的冲击,外防护层和内结构层之间形成空腔,在发生碰撞时,空腔可以产生部分形变,缓冲吸能,从而进一步提升防护板的防护能力。
[0019]
3、通过防撞块中部设施的毫米雷达波,对前后的障碍物进行扫描测距,当机体与障碍物的距离小于设定的安全距离会进行报警,通过防撞块发生碰撞来进行吸能,避免对机体造成损坏,从而可以提升机器人的耐用性。
附图说明
[0020]
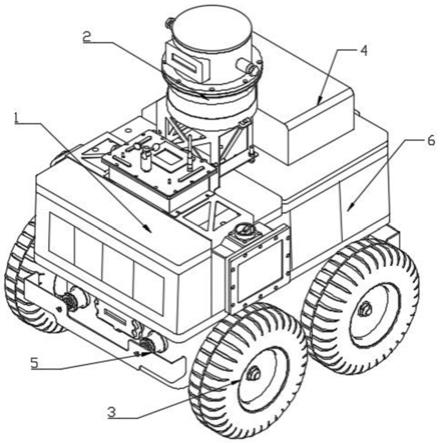
图1为实施例1的本发明一种井下机器人的碳纤维防爆外壳的整体结构图;
[0021]
图2为实施例1的本发明一种井下机器人的碳纤维防爆外壳的侧视结构图;
[0022]
图3为实施例1的本发明一种井下机器人的碳纤维防爆外壳的俯视结构图;
[0023]
图4为实施例1的本发明一种井下机器人的碳纤维防爆外壳中防护板的侧视结构
图;
[0024]
图5为实施例2的本发明一种井下机器人的碳纤维防爆外壳中防护板的侧视结构图;
[0025]
图6为实施例1的本发明一种井下机器人的碳纤维防爆外壳中防护板的侧剖结构图。
[0026]
图中:1、机体;2、探照模组;3、行走轮;4、存储腔;5、防撞块;6、防护板;61、外防护层;62、涂层;63、内结构层;64、沉孔槽;65、紧固螺栓;7、通信模块;8、缓冲杆;9、斜拉绳;10、固定块;11、结构加强杆;12、外侧包条。
具体实施方式
[0027]
以下结合附图对本发明作进一步详细说明。
[0028]
其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
[0029]
实施例1
[0030]
参照图1和图2所示,一种井下机器人的碳纤维防爆外壳,包括:机体1,所述机体1机器人的支撑主体结构,内部集成有用于控制设备的相关部件,所述机体1底部设置有两组行走轮3,所述行走轮3外侧设置有大尺寸的防滑轮胎,提升机器人的通过能力,更好的适应平整性差的井下路况,所述机体1下方前后两侧设置有防撞块5,所述防撞块5中部设施有毫米雷达波,对前后的障碍物进行扫描测距,当机体1与障碍物的距离小于设定的安全距离会进行报警,通过防撞块5发生碰撞来进行吸能,避免对机体1造成损坏,从而可以提升机器人的耐用性,
[0031]
所述机体1上方前侧设置有通信模块7,所述通信模块7内设置有信号输出和接收装置,用于将机体1内的信息与基站进行互通,保证信息的交互,所述机体1上中部设置有探照模组2,所述探照模组2为旋转的360
°
全息探照头,会不间断的机器人四周的环境进行录像,并将录像信息通过通信模块7传递到基站经过处理器处理后发回指令信息形成对于路线的判断,
[0032]
所述机体1上方设置有存储腔4,所述存储腔4内为空腔结构,用于存放需要进行携带的工具,以及可以井下进行传递的货物,提升适用性,
[0033]
综合图3所示,所述机体1的每个侧边均设置有两组缓冲杆8,所述缓冲杆8外侧设置有防护板6,通过防护板6来对机器人四周进行结构的防护,所述缓冲杆8中部设置有弹簧,可以让防护板6在收到外力冲击时进行形变吸能,进一步减少对于机体1本体的冲击,
[0034]
如图4所示,所述防护板6包括外防护层61和内结构层63,所述外防护层61为碳纤维材质制成的碳板,碳纤维是一种含碳量在95%以上的高强度、高模量新型纤维材料,它的力学性能表现突出,具有各项异性的特点,碳纤维具有高强轻质、抗腐蚀、耐老化、物理性能稳定等极其优越的品质,但是该材料成本很高,表面容易被刮花,所述内结构层63为芳纶材料制成的碳板,芳纶纤维除具有高强度、高弹性模量性能外,还有较高的耐热性能,常用的芳纶纤维为芳纶,其原丝的抗拉强度为2.67~2.9gpa,弹性模量为38.9~50gpa,弹性模量可增加到88.9gpa,所述外防护层61内部设置有沉孔槽64,所述沉孔槽64内部转动安装有紧
固螺栓65,通过紧固螺栓65将外防护层61和内结构层63进行连接,通过外防护层61和内结构层63的复合可以结合碳纤维和芳纶纤维的优势,可以进行定期的更换外防护层61,且可以保证良好经济性,所述外防护层61的芳纶纤维材料的注塑完成后无需进行表面加工,可以更好的保证结晶体的质量,从而提升外防护层61的力学强度,所述外防护层61右侧设置有涂层62,所述涂层62为石墨烯涂层,具有良好的散热能力,并且可以在外防护层61和内结构层63之间形成空腔,在发生碰撞时,空腔可以产生部分形变,缓冲吸能,从而进一步提升防护板6的防护能力,
[0035]
如图5所示,所述防护板6外侧设置有外侧包条12,所述外侧包条12为环形的橡胶垫,可以吸收能量,提升安全性,所述外侧包条12中部设置有结构加强杆11,所述结构加强杆11为纵横分布的碳纤维杆,该产品结构分为纤维复合层+芳纶复合层+纤维复合层,充分发挥碳纤维复合材料的耐候性、抗老化、轻量化、刚度提高等特性以及芳纶复合材料的较好的刚性性能等,可以有效阻止产品内部爆炸物的辐射状冲击,将爆炸冲击波和破片飞溅的伤害限制的筒体范围内,同时通过防爆产品壳体自身的吸能特性消除冲击能量,有效防止井矿爆炸危险,减少对于结构的稳定性高。
[0036]
实施例2
[0037]
参照图1和图2所示,一种井下机器人的碳纤维防爆外壳,包括:机体1,所述机体1机器人的支撑主体结构,内部集成有用于控制设备的相关部件,所述机体1底部设置有两组行走轮3,所述行走轮3外侧设置有大尺寸的防滑轮胎,提升机器人的通过能力,更好的适应平整性差的井下路况,所述机体1下方前后两侧设置有防撞块5,所述防撞块5中部设施有毫米雷达波,对前后的障碍物进行扫描测距,当机体1与障碍物的距离小于设定的安全距离会进行报警,通过防撞块5发生碰撞来进行吸能,避免对机体1造成损坏,从而可以提升机器人的耐用性,
[0038]
所述机体1上方前侧设置有通信模块7,所述通信模块7内设置有信号输出和接收装置,用于将机体1内的信息与基站进行互通,保证信息的交互,所述机体1上中部设置有探照模组2,所述探照模组2为旋转的360
°
全息探照头,会不间断的机器人四周的环境进行录像,并将录像信息通过通信模块7传递到基站经过处理器处理后发回指令信息形成对于路线的判断,
[0039]
所述机体1上方设置有存储腔4,所述存储腔4内为空腔结构,用于存放需要进行携带的工具,以及可以井下进行传递的货物,提升适用性,
[0040]
综合图3所示,所述机体1的每个侧边均设置有两组缓冲杆8,所述缓冲杆8外侧设置有防护板6,通过防护板6来对机器人四周进行结构的防护,所述缓冲杆8中部设置有弹簧,可以让防护板6在收到外力冲击时进行形变吸能,进一步减少对于机体1本体的冲击,
[0041]
如图4所示,所述防护板6包括外防护层61和内结构层63,所述外防护层61为碳纤维材质制成的碳板,碳纤维是一种含碳量在95%以上的高强度、高模量新型纤维材料,它的力学性能表现突出,具有各项异性的特点,碳纤维具有高强轻质、抗腐蚀、耐老化、物理性能稳定等极其优越的品质,但是该材料成本很高,表面容易被刮花,所述内结构层63为芳纶材料制成的碳板,芳纶纤维除具有高强度、高弹性模量性能外,还有较高的耐热性能,常用的芳纶纤维为芳纶,其原丝的抗拉强度为2.67~2.9gpa,弹性模量为38.9~50gpa,弹性模量可增加到88.9gpa,所述外防护层61内部设置有沉孔槽64,所述沉孔槽64内部转动安装有紧
固螺栓65,通过紧固螺栓65将外防护层61和内结构层63进行连接,通过外防护层61和内结构层63的复合可以结合碳纤维和芳纶纤维的优势,可以进行定期的更换外防护层61,且可以保证良好经济性,所述外防护层61的芳纶纤维材料的注塑完成后无需进行表面加工,可以更好的保证结晶体的质量,从而提升外防护层61的力学强度,所述外防护层61右侧设置有涂层62,所述涂层62为石墨烯涂层,具有良好的散热能力,并且可以在外防护层61和内结构层63之间形成空腔,在发生碰撞时,空腔可以产生部分形变,缓冲吸能,从而进一步提升防护板6的防护能力,
[0042]
如图6所示,所述防护板6外侧设置有外侧包条12,所述外侧包条12为环形的橡胶垫,可以吸收能量,提升安全性,所述外侧包条12中部设置有斜拉绳9,所述斜拉绳9为x形状的交错设计碳纤维杆,提升结构的抗斜拉能力,所述斜拉绳9中部设置有固定块10,用于对斜拉绳9结构的固定,提升稳定性,该产品结构分为纤维复合层+芳纶复合层+纤维复合层,充分发挥碳纤维复合材料的耐候性、抗老化、轻量化、刚度提高等特性以及芳纶复合材料的较好的刚性性能等,可以有效阻止产品内部爆炸物的辐射状冲击,将爆炸冲击波和破片飞溅的伤害限制的筒体范围内,同时通过防爆产品壳体自身的吸能特性消除冲击能量,有效防止井矿爆炸危险,减少对于结构的稳定性高。
[0043]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1