传菜机器人的制作方法
1.本发明属于自动传菜技术领域,具体涉及一种传菜机器人。
背景技术:
2.传菜人员负责菜品的传送工作,厨房出菜时,及时传递餐厅用餐宾客的各种要求、并负责落实,随着现在人力成本过高,使得一些传菜机器人出现,通过餐厅传菜机器人能为就餐人员送取食物,有效减小餐厅服务人员的工作强度,改善就餐环境,提高餐厅的服务质量,而现有的传菜机器人传菜效率,大多需要往复移动实现传菜。
技术实现要素:
3.本发明的目的在于提供一种传菜机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种传菜机器人,包括设置有多个电动抽屉的柜体、设置于柜体顶部的环境图像采集系统、设置于固定底部的电动行走机构和设置于柜体内的处理器,
5.所述环境图像采集系统用于采集机器人周围的环境信息,其输出端与处理器的输入端连接;
6.所述电动行走机构用于带动柜体移动,其输入端与处理器的输出端电连接;
7.处理器,用于处理环境图像采集系统采集的环境信息并驱动电动行走机构制动至设定位置,同时,处理器的输出端与电动抽屉的输入端电连接,当机器人移动至一设定位置后自动打开对应电动抽屉。
8.进一步,所述电动行走机构为设置于柜体底部的电动行走轮。
9.进一步,所述环境图像采集系统包括设置于柜体顶部的多个摄像头。
10.本发明的有益效果是:
11.本发明公开的传菜机器人,通过设置多个电动抽屉并由处理器控制对应电动抽屉打开和关闭,实现一次传菜过程可对多桌进行依次上菜,当然,电动抽屉打开后需要客人自动取菜,所述电动抽屉还具有保温功能,避免误端的同时,保证剩余菜品的热量不易散失,利于食用。
附图说明
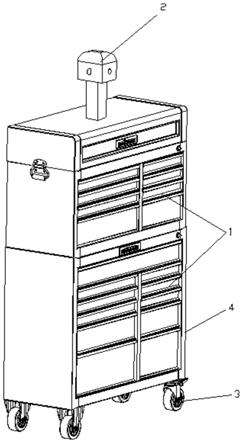
12.图1为本发明传菜机器人的结构示意图。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.如图1所示,本实施例中的传菜机器人,包括设置有多个电动抽屉1的柜体4、设置于柜体顶部的环境图像采集系统2、设置于固定底部的电动行走机构3和设置于柜体内的处理器,
15.所述环境图像采集系统用于采集机器人周围的环境信息,其输出端与处理器的输入端连接;
16.所述电动行走机构用于带动柜体移动,其输入端与处理器的输出端电连接;
17.处理器,用于处理环境图像采集系统采集的环境信息并驱动电动行走机构制动至设定位置,同时,处理器的输出端与电动抽屉的输入端电连接,当机器人移动至一设定位置后自动打开对应电动抽屉;所述电动抽屉可设置多个,通过设置多个电动抽屉并由处理器控制对应电动抽屉打开和关闭,实现一次传菜过程可对多桌进行依次上菜,当然,电动抽屉打开后需要客人自动取菜,所述电动抽屉还具有保温功能,避免误端的同时,保证剩余菜品的热量不易散失,利于食用。
18.本实施例中,所述电动行走机构为设置于柜体底部的电动行走轮;所述环境图像采集系统包括设置于柜体顶部的多个摄像头;所述电动行走轮和环境图像采集系统为现有技术,结合现有的处理器实现避让行人的目的,在此不再赘述。
19.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1