一种基于柔性应变传感器的机械手同步控制演示仪
1.本发明属于柔性传感技术领域,具体涉及一种基于柔性应变传感器的机械手同步控制演示仪。
背景技术:
2.随着信息时代的发展,人类社会和工业技术领域对信息的测量范围、精度和稳定情况等各性能参数的期望值和理想化要求逐步提高。针对特殊环境与特殊信号下气体、压力、湿度的测量需求,普通传感器已经远远不能满足需求,于是科研人员纷纷投身开发新材料、新工艺和开发新型传感器。同时,希望传感器还能够具有透明、柔韧、延展、可自由弯曲甚至折叠、便于携带、可穿戴等特点。随着柔性基底材料的发展,满足上述各类趋势特点的柔性传感器在此基础上应运而生。
3.现有的机械手同步控制演示仪,触觉反馈装置一般采用弹簧、电磁铁、液压机构等机械装置,存在结构复杂、体积大、不易穿戴等问题。基于柔性基底材料,提出一种基于柔性应变传感器的机械手同步控制演示仪,即通过柔性传感手套捕获操作者手的动作,进而通过单片机控制机械手实现做出相同动作的目的。既实现了接触式传感上的创新,又使人机交互更加自然。但目前还没有广泛的市场应用,因此设计一种演示仪器来展示其在教学应用上的价值。
技术实现要素:
4.要解决的技术问题:
5.为了避免现有技术的不足之处,本发明提出一种基于柔性应变传感器的机械手同步控制演示仪,利用柔性传感手套捕获使用者手指的动作,经过手套上的单片机将控制节点运动的信号发送给控制机械手的单片机,控制各舵机转动实现机械手模仿人手运动的目的。
6.本发明的技术方案是:一种基于柔性应变传感器的机械手同步控制演示仪,其特征在于:包括柔性传感手套、机械控制模块和仿真机械手;所述仿真机械手固定于操作台上,与所述机械控制模块连接;
7.所述柔性传感手套包括手套、柔性传感器、第一单片机和第一电源模块,5个所述柔性传感器分别设置于手套的五个手指上,并与第一单片机连接,用于捕获使用者手指的动作;所述第一单片机和第一电源模块设置于手套上,所述第一电源模块用于给第一单片机供电;
8.所述机械控制模块包括第二单片机、舵机控制板、舵机和第二电源模块,所述第二单片机、舵机控制板和舵机依次连接,多个所述舵机安装于所述仿真机械手上,所述第二电源模块用于给第二单片机供电;所述第二单片机通过蓝牙接收第一单片机关于使用者手指动作的信号,通过所述舵机驱动板控制多个所述舵机进行运动,实现仿真机械手的手势和人体手势的同步演示。
9.本发明的进一步技术方案是:所述第一单片机和第二单片机均为stm32f103zet6。
10.本发明的进一步技术方案是:所述柔性传感器包括仿真机械手涂层和基底,所述涂层为氮化钒与碳纳米管的混合物,所述基底为聚二甲基硅氧烷。
11.本发明的进一步技术方案是:所述舵机的数量为5个,分别安装于所述仿真机械手的五个手指上。
12.有益效果
13.本发明的有益效果在于:本发明将柔性应变传感器设置于手套上,制作成柔性传感手套,实现了手指与机械手指同步运动,使机械手的控制方式更加灵活多样,人机交互更加自然。该演示仪操作简单方便,能够直观的展示柔性传感与人机交互技术,具有较强的演示效果。
附图说明
14.图1为柔性传感器示意图;
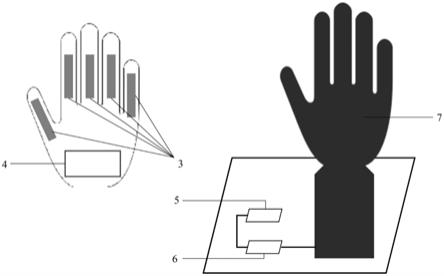
15.图2为柔性传感手套示意图;
16.图3为基于柔性传感器的同步控制机械手演示仪电路整体布局图;
17.附图标记说明:1-氮化钒与碳纳米管的混合物,2-聚二甲基硅氧烷(pdms,polydimethylsiloxane)基底,3-柔性传感器,4-第一单片机,5-第二单片机,6-舵机控制板,7-仿真机械手。
具体实施方式
18.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
19.本发明一种基于柔性应变传感器的机械手同步控制演示仪包括柔性传感手套、机械控制模块和仿真机械手7;
20.如图2所示,所述柔性传感手套包括手套、柔性传感器3、第一单片机4和第一电源模块,5个柔性传感器3分别设置于手套的五个手指内侧,并与第一单片机4连接,用于捕获使用者手指的动作;所述第一单片机和第一电源模块设置于手套上,所述第一电源模块用于给第一单片机供电;
21.如图3所示,所述机械控制模块包括第二单片机5、舵机控制板6、舵机和第二电源模块,所述第二单片机5、舵机控制板6和舵机依次连接,多个所述舵机安装于仿真机械手7上,所述第二电源模块用于给第二单片机5供电;第二单片机5通过蓝牙接收第一单片机4关于使用者手指动作的信号,通过舵机驱动板6控制多个所述舵机进行运动,实现仿真机械手7的手势和人体手势的同步演示。
22.所述第一单片机和第二单片机均为stm32f103zet6。
23.如图1所示,柔性传感器3是一种新型应力传感器,在制备该传感器时,将氮化钒与碳纳米管的混合物1涂覆到聚二甲基硅氧烷(pdms,polydimethylsiloxane)基底2上,烘干后制备成性能稳定的应力传感器,传感器的两端分别设有导线,可分别接入电路中。
24.如图3所示,将仿真机械手7固定在桌面上,并与机械控制模块相连,使用者穿戴柔性传感手套。装置工作时,柔性传感手套的第一电源模块为固定于手套上的第一单片机4供
电,机械控制模块的第二电源模块为桌面上的第二单片机5供电,用于驱动仿真机械手的运动。使用者穿戴柔性传感手套活动手指时,手指的运动信息通过固定在手套上的柔性传感器3,传输给手套上的第一单片机4,经过第一单片机4处理后,将柔性传感器3所在的控制节点运动的信息通过蓝牙发送给控制机械手的第二单片机5。控制机械手的第二单片机5根据处理后的信息控制舵机驱动板6,舵机驱动板6控制仿真机械手7各处的舵机运动,使仿真机械手7的手势和人体手势相同,实现通过手势控制机械手运动的演示。
25.本发明实现了柔性传感手套捕获人体手势,并无线控制仿真机械手动作,能直观的演示柔性传感及控制技术,操作简单方便,演示效果直观,以仿真机械手做出和人体手势同样动作的方式进行演示,增强了柔性传感和控制演示的趣味性和可操作性。同时本演示仪适用范围广,手势识别还原精度高,提高了学生对柔性传感的认知和了解,在实际应用中取得了良好的教学效果。
26.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1