一种仿真机器人的制作方法
[0001]
本实用新型涉及仿真机器人技术领域,具体涉及一种仿真机器人。
背景技术:
[0002]
高仿真人形机器人的整体结构,可以高度还原人体的运动,有较高的自由度,可以实现多种肢体运动,动作灵活且协调,由于人形机器人的尺寸决定了安装空间问题,结构复杂的设计给控制、维修和检修带来不便和未知的问题。
[0003]
机器人结构的自由度越多,仿真的指数就越高,由于结构的复杂,导致机构运行时为了控制机器人本身的平衡问题,现有的机器人腿部采用仿真脚掌进行设置,由于仿真脚掌呈支板状,机器人运动时,支撑脚和移动脚底部的仿真脚掌倾斜角度相反,不便于根据运动状态对仿真脚掌的倾斜角度进行控制,导致机器人不便于协调的实现运动。
技术实现要素:
[0004]
(一)要解决的技术问题
[0005]
为了克服现有技术不足,现提出一种仿真机器人,解决了机器人的由于仿真脚掌呈支板状,机器人运动时,支撑脚和移动脚底部的仿真脚掌倾斜角度相反,不便于根据运动状态对仿真脚掌的倾斜角度进行控制,导致机器人不便于协调的实现运动的问题。
[0006]
(二)技术方案
[0007]
本实用新型通过如下技术方案实现:本实用新型提出了一种仿真机器人,包括身体主体,
[0008]
支撑主板,用于对腿部机构进行支撑;
[0009]
腿部机构,用于对机器人的移动进行驱动;
[0010]
处理器,用于对腿部机构进行控制;
[0011]
进一步的,所述腿部机构设置有两个,且结构一致,分别设置与支撑主板底部左右两侧;
[0012]
进一步的,所述支撑主板呈水平面设置。
[0013]
进一步的,所述身体主体顶端安装有机器头部,所述身体主体左右两侧顶端安装有手臂机构,所述身体主体底端通过螺栓与支撑主板相互锁固,所述支撑主板底端通过转轴与腿部机构进行转动连接。
[0014]
进一步的,所述腿部机构由大腿部直杆、第一电动推杆、第一转轴、小腿部直杆、第二电动推杆、电机、转动轴和脚掌机构组成,所述大腿部直杆后侧顶端通过转轴与第一电动推杆进行转动连接,所述大腿部直杆底端通过第一转轴与小腿部直杆进行同心转动,所述第二电动推杆前端分别通过转轴与大腿部直杆和小腿部直杆进行转动,所述小腿部直杆内部底端嵌入有电机,且通过螺栓与电机相互锁固,所述电机底端的输出轴与转动轴相互锁固,且转动轴底端通过螺栓与脚掌机构相互锁固,所述大腿部直杆和第一电动推杆顶端均通过转轴与支撑主板进行转动连接。
[0015]
进一步的,所述脚掌机构由脚掌底板、第一支板、旋转支杆、第二支板、第三电动推杆、第三支板和支撑橡胶垫组成,所述脚掌底板顶端左侧焊接有第一支板,所述第一支板通过转轴与旋转支杆进行同心转动,所述脚掌底板顶端右侧与第二支板相互焊接,且第二支板转轴与第三电动推杆进行转动连接,所述第三电动推杆顶端通过转轴与第三支板进行转动连接,且第三支板焊接在旋转支杆右侧顶部,所述脚掌底板底端粘接有支撑橡胶垫,所述旋转支杆顶端通过螺栓与转动轴进行转动连接,所述第一电动推杆、第二电动推杆、电机、第三电动推杆、机器头部、手臂机构和蓄电池分别与处理器外侧的连接端口电连接。
[0016]
进一步的,所述第一电动推杆延展时,由前至后向上呈四十五度角倾斜。
[0017]
进一步的,所述电机的每次运作的旋转角度为一百八十度,且往复进行旋转。
[0018]
进一步的,所述支撑橡胶垫的厚度为一厘米,且底部设置有防滑纹路。
[0019]
进一步的,所述第三电动推杆延展时,脚掌底板与旋转支杆之间的夹角呈九十度。
[0020]
进一步的,所述电机采用型号为bl60系列伺服电机。
[0021]
进一步的,所述支撑橡胶垫采用丁晴橡胶材质。
[0022]
(三)有益效果
[0023]
本实用新型相对于现有技术,具有以下有益效果:
[0024]
本实用新型通过在仿真机器人底部设置了腿部机构,腿部机构用于模仿人体的腿部弯曲,且在腿部机构底部安装了脚掌机构,脚掌机构呈 l状,且通过第三电动推杆对脚掌底板的倾斜角度进行调节控制,脚掌机构顶端通过电机进行转动控制,电机的每次运作的旋转角度为一百八十度,且往复进行旋转,在机器人运动时,由于支撑脚和移动脚底部的仿真脚掌倾斜角度相反,通过电机控制脚掌的倾斜角度和方向,使仿真腿部的与地面呈平面接触,增加对机器人运动的协调性。
附图说明
[0025]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
[0026]
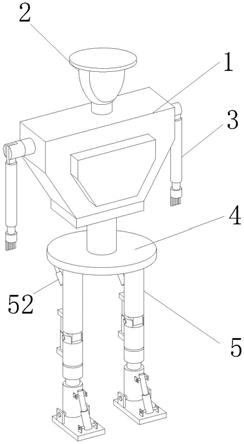
图1为本实用新型的结构示意图;
[0027]
图2为本实用新型的身体主体内部结构剖面图;
[0028]
图3为本实用新型的腿部机构结构示意图;
[0029]
图4为本实用新型的小腿部直杆内部结构示意图;
[0030]
图5为本实用新型的支撑橡胶垫结构侧视图。
[0031]
图中:身体主体-1、机器头部-2、手臂机构-3、支撑主板-4、腿部机构-5、蓄电池-6、处理器-7、大腿部直杆-51、第一电动推杆-52、第一转轴-53、小腿部直杆-54、第二电动推杆-55、电机-56、转动轴-57、脚掌机构-58、脚掌底板-581、第一支板-582、旋转支杆-583、第二支板-584、第三电动推杆-585、第三支板-586、支撑橡胶垫-587。
具体实施方式
[0032]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0033]
请参阅图1、图2、图3、图4和图5,本实用新型提供一种仿真机器人:包括身体主体1,
[0034]
支撑主板4,用于对腿部机构5进行支撑,对腿部机构5提供支撑点;
[0035]
腿部机构5,用于对机器人的移动进行驱动,用于仿真人体进行移动;
[0036]
处理器7,用于对腿部机构5进行控制,控制腿部机构5进行驱动,进而控制机器人进行行走;
[0037]
其中,腿部机构5设置有两个,且结构一致,分别设置与支撑主板 4底部左右两侧,使机器人进行仿真行走;
[0038]
其中,支撑主板4呈水平面设置,对两个腿部机构5进行平行支撑。
[0039]
其中,所述身体主体1顶端安装有机器头部2,所述身体主体1左右两侧顶端安装有手臂机构3,所述身体主体1底端通过螺栓与支撑主板4相互锁固,所述支撑主板4底端通过转轴与腿部机构5进行转动连接。
[0040]
其中,所述腿部机构5由大腿部直杆51、第一电动推杆52、第一转轴53、小腿部直杆54、第二电动推杆55、电机56、转动轴57和脚掌机构58组成,所述大腿部直杆51后侧顶端通过转轴与第一电动推杆52进行转动连接,所述大腿部直杆51底端通过第一转轴53与小腿部直杆54进行同心转动,所述第二电动推杆55前端分别通过转轴与大腿部直杆51和小腿部直杆54进行转动,所述小腿部直杆54内部底端嵌入有电机56,且通过螺栓与电机56相互锁固,所述电机56底端的输出轴与转动轴57相互锁固,且转动轴57底端通过螺栓与脚掌机构58相互锁固,所述大腿部直杆51和第一电动推杆52顶端均通过转轴与支撑主板4进行转动连接。
[0041]
其中,所述脚掌机构58由脚掌底板581、第一支板582、旋转支杆 583、第二支板584、第三电动推杆585、第三支板586和支撑橡胶垫 587组成,所述脚掌底板581顶端左侧焊接有第一支板582,所述第一支板582通过转轴与旋转支杆583进行同心转动,所述脚掌底板581 顶端右侧与第二支板584相互焊接,且第二支板584转轴与第三电动推杆585进行转动连接,所述第三电动推杆585顶端通过转轴与第三支板586进行转动连接,且第三支板586焊接在旋转支杆583右侧顶部,所述脚掌底板581底端粘接有支撑橡胶垫587,所述旋转支杆583 顶端通过螺栓与转动轴57进行转动连接,所述第一电动推杆52、第二电动推杆55、电机56、第三电动推杆585、机器头部2、手臂机构3 和蓄电池6分别与处理器7外侧的连接端口电连接。
[0042]
其中,所述第一电动推杆52延展时,由前至后向上呈四十五度角倾斜,有利于使第一电动推杆52收缩时控制大腿部直杆51进行弯折。
[0043]
其中,所述电机56的每次运作的旋转角度为一百八十度,且往复进行旋转,对脚掌机构58的支撑方向进行旋转。
[0044]
其中,所述支撑橡胶垫587的厚度为一厘米,且底部设置有防滑纹路,对脚掌底板581底部进行减震,且具有防滑效果。
[0045]
其中,所述第三电动推杆585延展时,脚掌底板581与旋转支杆583 之间的夹角呈九十度,通过第三电动推杆585延展时对脚掌底板581 的倾斜角度进行控制。
[0046]
其中,所述电机56采用型号为bl60系列伺服电机,控制效果好,且不易损坏。
[0047]
其中,所述支撑橡胶垫587采用丁晴橡胶材质,减震效果好,且不易损坏,增加其使用寿命。
[0048]
本专利所述的支撑橡胶垫587采用丁晴橡胶材质,丁腈橡胶是由丁二烯和丙烯腈经乳液聚合法制得的,丁腈橡胶主要采用低温乳液聚合法生产,耐油性极好,耐磨性较高,耐热性较好,粘接力强。
[0049]
工作原理:在使用前,首先对蓄电池6进行充电,在使用时,通过身体主体1内部的处理器7进行数据计算,且分别对第一电动推杆52、第二电动推杆55、电机56、第三电动推杆585、机器头部2、手臂机构3进行控制,在控制仿真机器人进行移动时,首先控制一个腿部机构5内的第一电动推杆52进行收缩,使大腿部直杆51向上进行抬起,且控制第二电动推杆55进行收缩,使小腿部直杆54沿第一转轴53向下进行弯折,然后控制电机56产生动力通过输出轴带动底部的脚掌机构58进行旋转一百八十度角,同时控制底部的脚掌机构58内的第三电动推杆585进行收缩,以便于使脚掌底板581与地面进行平面接触,且控制另一腿部机构5内的第二电动推杆55和第三电动推杆858进行收缩,使大腿部直杆51和小腿部直杆54之间进行弯折,通过第三电动推杆858收缩使该腿部机构5向前倾斜,使伸出的腿部机构5与地面呈平面接触,然后控制抬出的腿部机构5的第二电动推杆55和第三电动推杆858进行延展,同时控制支撑受力的腿部机构5重复另一腿部机构5的抬脚动作进行运动,重复该动作的切换,使机器人进行行走运动,通过电机56控制脚掌机构58的倾斜角度和方向,使腿部机构5的脚掌底板581与地面呈平面接触,增加对机器人运动的协调性。
[0050]
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,并且本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式, 在此不再详述。
[0051]
对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0052]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1