一种基于UWB室内定位模块的服务机器人系统的制作方法
一种基于uwb室内定位模块的服务机器人系统
技术领域
1.本实用新型属于机器人应用技术领域,具体涉及一种基于uwb室内定位模块的服务机器人系统。
背景技术:
2.近年来,随着科技的快速发展,机器人的应用领域越来越广泛,特别是在一些高危领域,比如探险、危化学品的生产线等;或者是在一些高精端的无尘工厂,机器人已经得到了广泛的应用,但是针对于一些民用领域,比如餐馆,居家等,机器人则处于起步阶段;在一些特殊情况下,比如高危传染病的病房,机器人与人类相比,无形中具有更大的优势,在传染病流行的地区,机器人的存在能够减少不必要的污染环节,为此,人们对无人餐馆的需求越来越迫切,众所周知,定位技术是机器人的核心技术之一,在野外,机器人可以利用gps或者北斗进行定位,但是在室内,受到建筑物的遮挡,传统的定位技术很难满足室内高精度定位的需求,为此,涉及开发一种基于uwb室内定位模块的服务机器人系统显得是尤为重要。
技术实现要素:
3.本实用新型为解决公知技术中存在的技术问题,提供一种基于uwb室内定位模块的服务机器人系统,通过多个uwb定位基站对室内的物品和机器人位置进行准确定位,随后通过控制终端控制机器人到达相应物品的位置进行取放物品。
4.本实用新型的目的是提供一种基于uwb室内定位模块的服务机器人系统,至少包括:
5.至少三个定位模块;所述定位模块为uwb定位基站;
6.安装于机器人上的第一定位标签;
7.安装于每件物品上的第二定位标签;
8.与所述机器人进行数据交互的控制终端。
9.优选地,每间屋子设置有四个uwb定位基站。
10.优选地,每件物品上设置有身份识别码,所述机器人上安装有扫码枪。
11.优选地,所述机器人和控制终端上均安装有通信用的zigbee模块。
12.优选地,所述uwb定位基站为uwb1000定位模块。
13.优选地,所述机器人安装有jy61p姿态传感器。
14.优选地,所述机器人安装有语音播报模块。
15.优选地,所述机器人安装有避障模块。
16.优选地,所述控制终端为手机。
17.本实用新型具有的优点和积极效果是:
18.1、本实用新型通过多个uwb定位基站对室内的物品和机器人位置进行准确定位,随后通过控制终端控制机器人到达相应物品的位置进行取放物品,一方面适用于行动不便的人群,另外一方面也避免了交叉感染,减少病毒传播的环节;
19.2、本实用新型采用的各项技术均为较为成熟的现有技术,因此,实施采购和搭建比较方便,稳定性高。
附图说明
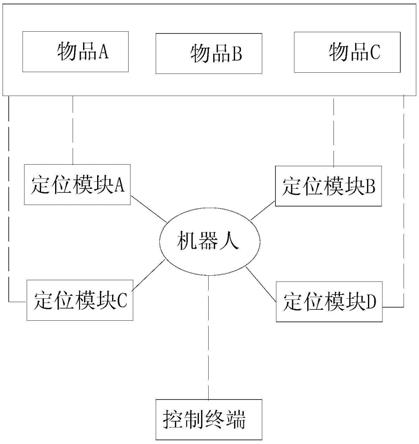
20.图1为本实用新型优选实施例的结构框图;
21.图2为本实用新型优选实施例的电路图。
具体实施方式
22.为能进一步了解本实用新型的
技术实现要素:
、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
23.如图1和图2所示,本实用新型的技术方案为:
24.一种基于uwb室内定位模块的服务机器人系统,包括:
25.设置于室内四个角上的四个定位模块;所述定位模块为uwb定位基站;
26.安装于机器人上的第一定位标签;
27.安装于每件物品上的第二定位标签;
28.与所述机器人进行数据交互的控制终端。
29.在本优选实施例中:uwb的室内定位功能是通过室内布置4个已知坐标的定位基站,需要定位的机器人和物品设备携带定位标签,标签按照一定的频率发射脉冲,不断和4个已知位置的基站进行测距,通过一定的精确算法定出标签的位置;测量算法为现有技术,因此此处不再赘述;
30.为了放置取错物品,本实用新型在上述优选实施例的基础上,在每件物品上设置有身份识别码,所述机器人上安装有扫码枪,上述身份识别码优选的是技术比较成熟的二维码。
31.由于并非所有的室内环境都覆盖了wifi信号,蓝牙传输受限于距离且易受干扰,故在上述优选实施例的基础上,本实施例采用组网简单、传输距离较长的zigbee模块进行无线数据传输。即所述机器人和控制终端上均安装有通信用的zigbee模块。
32.zigbee网络具有三种节点:终端节点(精简功能设备)、路由结点(全功能设备)、中心节点(网络协调器),由三种节点组成了zigbee网络的3种拓扑结构:星型、树形和网状网络拓扑。
33.(1)星型网络拓扑,由三种节点组成。网络中所有节点都与中心节点直接连接,节点间不能直接通信,只能通过中心节点来完成数据的传输。
34.(2)网状网络拓扑,由三种节点组成,路由节点间可以相互通信,终端节点可以与相邻的路由节点通信。
35.(3)树状网络拓扑,由三种节点组成,每个全功能设备(中心节点、路由节点)都可以组成一个星型网络,然后组合成整个树状网络。
36.在zigbee技术中,存在三种数据传输模式:第一种是数据从设备传输到协调器;第二种是数据从协调器传输到设备上;第三种是数据传输在两个对等设备之间。在星形网络中,只有第一种和第二种这两种传输模式,因为数据交互只能在协调器和设备之间进行;而在对等网络中,设备之间可以交互数据。zigbee的ieee 802.15.4网络中所有节点都工作在
同一个信道上,因此如果邻近的节点同时发送数据就有可能发生冲突。为此mac层采用了csma/ca的技术,通过这种信道接入技术,所有节点竞争共享同一个信道。
37.dl
‑
20无线串口模块为串口转2.4g无线模块,可以通过无线将两个或者多个串口连接起来。串口发入模块的数据会被模块使用无线发出,收到无线数据的模块会将这个数据使用串口发出,在两个设备上使用模块就像将这两个设备用串口连接起来一样。
38.dl
‑
20模块可以配置为点对点模式和广播模式使用。点对点模式分为a端和b端,a端串口收到的数据会被b端串口发出,反之亦然。此模式下同一频道只准许两个节点相互通信,通信可保证数据丢失率为0.00%。广播模式下,一个节点的串口收到的数据会从所有距离可及、且频道相同的节点收到,并从串口发出。此模式下数据会有1%左右的误比特率,在多点同时发送数据时,误比特率会显著提高。dl
‑
20模块配置分为5个步骤:进入设置模式、设置波特率、设置频道、设置主从机、确认设置。
39.通过测试,上述优选实施例中,所述uwb定位基站为uwb1000定位模块。
40.为了防止机器人侧翻和持物稳定,所述机器人安装有jy61p姿态传感器。
41.jy61p传感器模块使用bmi160芯片实现,bmi160是一款低成本的6轴传感器芯片,芯片内部由加速度计、陀螺仪、地磁场传感器、角度测量传感器四部分组成。其中,角度测量传感器包括三轴加速度、三轴角速度、三轴陀螺仪。采用标准iic通信协议,芯片内置16bit ad转换器进行16位数据传输,以数字输出6轴或9轴的旋转矩阵、四元数、欧拉角格式的融合演算数据。
42.使用jy61p模块输出角速度和加速度的原始数据,用算法进行姿态融合,得到角度数据,从而控制小车轮子的移动。综合利用陀螺仪和加速度计的特点,配合动态卡尔曼滤波算法进行数据融合,优势互补获得准确的姿态角度。模块姿态用四元素表示,作为系统的状态量,模块的姿态运动学方程作为滤波的状态转移方程,加速度作为滤波的观察量,利用卡尔曼滤波的计算方法迭代更新。
43.同时,所述机器人安装有语音播报模块。
44.为了防止机器人碰撞,所述机器人安装有避障模块。
45.所述控制终端可以是手机,也可以是其他专用的通信终端,当为手机时,需要根据机器人的型号,下载与之对应的控制app。
46.本实用新型的工作原理为:
47.首先在室内建立uwb定位基站;uwb定位基站进而对室内的机器人和每件物品的位置进行实时监测;并将监测结果发送给机器人;
48.然后机器人和控制终端建立通信关系,通过控制终端向机器人下发取物指令;
49.之后机器人根据指令,到达指定物品的位置进行相应的动作;
50.当指令动作完成后,机器人进入待机状态,等待下一指令。
51.本实用新型通过多个uwb定位基站对室内的物品和机器人位置进行准确定位,随后通过控制终端控制机器人到达相应物品的位置进行取放物品,一方面适用于行动不便的人群,另外一方面也避免了交叉感染,减少病毒传播的环节。
52.以上所述仅是对本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1