一种生态遥感多自由度支持装置的制作方法
1.本实用新型涉及支持装置技术领域,特别是涉及一种生态遥感多自由度支持装置。
背景技术:
2.生态遥感仪器是通过电磁辐射获取的记录远距离目标的特征信息,以及对所获取的信息进行处理和判读的仪器,无人机就是运用生态遥感仪器操控飞机的,让飞机进行人类不好完成的事情,生态遥感仪器需要支持装置,但是传统的生态遥感多支持装置,结构简单不能进行支持角度的改变,影响信号的发出和接收。
技术实现要素:
3.本实用新型的目的是提供一种生态遥感多自由度支持装置,能够通过感应柱接收信号,控制多个调整机构进行支持角度的改变。
4.本实用新型的目的通过以下技术方案来实现:
5.一种生态遥感多自由度支持装置,包括减振支撑底座、调整机构、遥感控制机构和支持夹具,多个调整机构均固定连接在减振支撑底座的上端,多个调整机构均转动连接在遥感控制机构的下端,支持夹具固定连接在遥感控制机构的上端;
6.所述的减振支撑底座包括支撑底板、伸缩支持杆、上支持板和减震弹簧,多个伸缩支持杆的下端分别固定连接在支撑底板上端的四角处,多个伸缩支持杆的上端分别上支持板下端的四角处,多个减震弹簧分别套设在多个伸缩支持杆上;
7.所述的调整机构包括连接座、转动连接杆、推杆连接座、调整电机a、内螺纹杆、螺纹杆和支撑连接座,转动连接杆转动连接在连接座上,推杆连接座固定连接在转动连接杆上,调整电机a转动连接在推杆连接座上,内螺纹杆固定连接在调整电机a的输出轴上,螺纹杆与内螺纹杆通过螺纹传动,螺纹杆转动连接在支撑连接座上,多个支撑连接座均固定连接在上支持板的上端,多个连接座均固定连接在上支持板的上端;
8.所述的遥感控制机构包括上承载板、感应柱、调整块、连接柱和调整连接杆,两个感应柱均固定连接在上承载板的左端,多个连接柱均固定连接在上承载板上,多个调整块分别转动连接在多个连接柱上,多个调整连接杆分别转动连接在多个调整块上,多个调整连接杆分别转动连接在多个转动连接杆上;
9.所述的支持夹具包括夹具支撑盘、固定板、电机、调整丝杆、滑动杆、加持板和调整电机b,两个固定板均固定连接在夹具支撑盘上,电机固定连接在位于右端的固定板上,调整丝杆转动连接在两个固定板上,调整丝杆固定连接在电机的输出轴上,滑动杆固定连接在两个固定板之间,两个加持板均和调整丝杆通过螺纹传动,两个加持板均滑动连接在滑动杆上,夹具支撑盘固定连接在调整电机b的输出轴上。
10.本实用新型的有益效果为:
11.本实用新型提供了一种生态遥感多自由度支持装置,将生态遥感仪放置在两个加
持板之间,启动电机调整丝杆转动,两个加持板在调整丝杆的螺纹推动下进行相向移动,将生态遥感仪固定,将生态遥感仪通过导线与两个感应柱连接,更方便信号的接收,多个减震弹簧和多个伸缩支持杆的设置能够在无人机降落起到减震的作用,能够通过启动四角处不同的调整电机,来使内螺纹杆转动,将螺纹杆进行推出或收回,能使连接的转动连接杆的旋转,调整调整连接杆的角度,能够改变所连接的上承载板的一角的高低,就能够改变支持夹具的角度。
附图说明
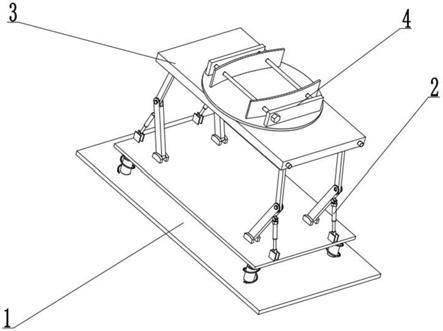
12.图1是本实用新型的整体结构示意图;
13.图2是本实用新型的减振支撑底座结构示意图;
14.图3是本实用新型的调整机构结构示意图;
15.图4是本实用新型的遥感控制机构结构剖视图;
16.图5是本实用新型的支持夹具结构示意图一;
17.图6是本实用新型的支持夹具结构示意图二。
18.图中:减振支撑底座1;支撑底板1
‑
1;伸缩支持杆1
‑
2;上支持板1
‑
3;减震弹簧1
‑
4;调整机构2;连接座2
‑
1;转动连接杆2
‑
2;推杆连接座2
‑
3;调整电机a2
‑
4;内螺纹杆2
‑
5;螺纹杆2
‑
6;支撑连接座2
‑
7;遥感控制机构3;上承载板3
‑
1;感应柱3
‑
2;调整块3
‑
3;连接柱3
‑
4;调整连接杆3
‑
5;支持夹具4;夹具支撑盘4
‑
1;固定板4
‑
2;电机4
‑
3;调整丝杆4
‑
4;滑动杆4
‑
5;加持板4
‑
6;调整电机b4
‑
7。
具体实施方式
19.下面结合附图1
‑
6对本实用新型做进一步详细说明。
20.具体实施方式一:
21.如图1
‑
6所示,一种生态遥感多自由度支持装置,包括减振支撑底座1、调整机构2、遥感控制机构3和支持夹具4,多个调整机构2均固定连接在减振支撑底座1的上端,多个调整机构2均转动连接在遥感控制机构3的下端,支持夹具4固定连接在遥感控制机构3的上端;
22.将生态遥感仪放置在两个加持板4
‑
6之间,启动电机4
‑
3调整丝杆4
‑
4转动,两个加持板4
‑
6在调整丝杆4
‑
4的螺纹推动下进行相向移动,将生态遥感仪固定,将生态遥感仪通过导线与两个感应柱3
‑
2连接,更方便信号的接收,多个减震弹簧1
‑
4和多个伸缩支持杆1
‑
2的设置能够在无人机降落起到减震的作用,能够通过启动四角处不同的调整电机a2
‑
4,来使内螺纹杆2
‑
5转动,将螺纹杆2
‑
6进行推出或收回,能使连接的转动连接杆2
‑
2的旋转,调整调整连接杆3
‑
5的角度,能够改变所连接的上承载板3
‑
1的一角的高低,就能够改变支持夹具4的角度。
23.具体实施方式二:
24.如图1
‑
6所示,所述的减振支撑底座1包括支撑底板1
‑
1、伸缩支持杆1
‑
2、上支持板1
‑
3和减震弹簧1
‑
4,多个伸缩支持杆1
‑
2的下端分别固定连接在支撑底板1
‑
1上端的四角处,多个伸缩支持杆1
‑
2的上端分别上支持板1
‑
3下端的四角处,多个减震弹簧1
‑
4分别套设在多个伸缩支持杆1
‑
2上;
25.无人机进行降落时,多个伸缩支持杆1
‑
2收缩,多个减震弹簧1
‑
4被压缩,能够吸收降落的冲击力,防止无人机降落冲击力过大损坏无人机。
26.具体实施方式三:
27.如图1
‑
6所示,所述的调整机构2包括连接座2
‑
1、转动连接杆2
‑
2、推杆连接座2
‑
3、调整电机a2
‑
4、内螺纹杆2
‑
5、螺纹杆2
‑
6和支撑连接座2
‑
7,转动连接杆2
‑
2转动连接在连接座2
‑
1上,推杆连接座2
‑
3固定连接在转动连接杆2
‑
2上,调整电机a2
‑
4转动连接在推杆连接座2
‑
3上,内螺纹杆2
‑
5固定连接在调整电机a2
‑
4的输出轴上,螺纹杆2
‑
6与内螺纹杆2
‑
5通过螺纹传动,螺纹杆2
‑
6转动连接在支撑连接座2
‑
7上,多个支撑连接座2
‑
7均固定连接在上支持板1
‑
3的上端,多个连接座2
‑
1均固定连接在上支持板1
‑
3的上端;
28.启动调整电机a2
‑
4,内螺纹杆2
‑
5转动在螺纹的推动下螺纹杆2
‑
6伸出,使转动连接杆2
‑
2与地面的角度变大。
29.具体实施方式四:
30.如图1
‑
6所示,所述的遥感控制机构3包括上承载板3
‑
1、感应柱3
‑
2、调整块3
‑
3、连接柱3
‑
4和调整连接杆3
‑
5,两个感应柱3
‑
2均固定连接在上承载板3
‑
1的左端,多个连接柱3
‑
4均固定连接在上承载板3
‑
1上,多个调整块3
‑
3 分别转动连接在多个连接柱3
‑
4上,多个调整连接杆3
‑
5分别转动连接在多个调整块3
‑
3上,多个调整连接杆3
‑
5分别转动连接在多个转动连接杆2
‑
2上;
31.转动连接杆2
‑
2与地面的角度变大,相连接的的调整连接杆3
‑
5的与转动连接杆2
‑
2的角度变大,使连接的上承载板3
‑
1的一角上升,通过调整四个角连接的调整电机a2
‑
4,来调整上承载板3
‑
1与地面的角度。
32.具体实施方式五:
33.如图1
‑
6所示,所述的支持夹具4包括夹具支撑盘4
‑
1、固定板4
‑
2、电机4
‑
3、调整丝杆4
‑
4、滑动杆4
‑
5、加持板4
‑
6和调整电机b4
‑
7,两个固定板4
‑
2 均固定连接在夹具支撑盘4
‑
1上,电机4
‑
3固定连接在位于右端的固定板4
‑
2 上,调整丝杆4
‑
4转动连接在两个固定板4
‑
2上,调整丝杆4
‑
4固定连接在电机4
‑
3的输出轴上,滑动杆4
‑
5固定连接在两个固定板4
‑
2之间,两个加持板 4
‑
6均和调整丝杆4
‑
4通过螺纹传动,两个加持板4
‑
6均滑动连接在滑动杆4
‑
5 上,夹具支撑盘4
‑
1固定连接在调整电机b4
‑
7的输出轴上;
34.启动调整电机b4
‑
7,能够使夹具支撑盘4
‑
1转动,将生态遥感仪放置着在两个加持板4
‑
6之间,启动电机4
‑
3调整丝杆4
‑
4转动,在螺纹推动下两个固定板4
‑
2同时向内移动,完成夹持固定。
35.本实用新型一种生态遥感多自由度支持装置,其使用原理为:将生态遥感仪放置在两个加持板4
‑
6之间,启动电机4
‑
3调整丝杆4
‑
4转动,两个加持板 4
‑
6在调整丝杆4
‑
4的螺纹推动下进行相向移动,将生态遥感仪固定,将生态遥感仪通过导线与两个感应柱3
‑
2连接,更方便信号的接收,多个减震弹簧1
‑
4 和多个伸缩支持杆1
‑
2的设置能够在无人机降落起到减震的作用,能够通过启动四角处不同的调整电机a2
‑
4,来使内螺纹杆2
‑
5转动,将螺纹杆2
‑
6进行推出或收回,能使连接的转动连接杆2
‑
2的旋转,调整调整连接杆3
‑
5的角度,能够改变所连接的上承载板3
‑
1的一角的高低,就能够改变支持夹具4的角度,无人机进行降落时,多个伸缩支持杆1
‑
2收缩,多个减震弹簧1
‑
4被压缩,能够吸收降落的冲击力,防止无人机降落冲击力过大损坏无人机,启动调整电机 b4
‑
7,能够使夹具支撑盘4
‑
1转动,将生
态遥感仪放置着在两个加持板4
‑
6之间,启动电机4
‑
3调整丝杆4
‑
4转动,在螺纹推动下两个固定板4
‑
2同时向内移动,完成夹持固定,启动调整电机a2
‑
4,内螺纹杆2
‑
5转动在螺纹的推动下螺纹杆2
‑
6伸出,使转动连接杆2
‑
2与地面的角度变大,转动连接杆2
‑
2与地面的角度变大,相连接的的调整连接杆3
‑
5的与转动连接杆2
‑
2的角度变大,使连接的上承载板3
‑
1的一角上升,通过调整四个角连接的调整电机a2
‑
4,来调整上承载板3
‑
1与地面的角度。
36.当然,上述说明并非对本实用新型的限制,本实用新型也不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1