一种防脱落智能海绵夹具装置的制作方法
1.本实用新型属于海绵加工技术领域,尤其涉及一种防脱落智能海绵夹具装置。
背景技术:
2.在目前的海绵加工领域通常会使用海绵夹具,在海绵加工中,海绵夹具用来夹持海绵,对海面进行移动,或者对海绵进行加工。
3.我们现在常见的海绵夹具通常夹持效果不好,海绵容易脱落效率较低,且普通夹具结构过于简单,功能单一,体积较大,不适用于现在的智能化生产。
技术实现要素:
4.本实用新型提供一种防脱落智能海绵夹具装置,旨在解决上述背景技术中提到的夹持效果较差、功能单一、架构过于简单的问题。
5.本实用新型是这样实现的,一种防脱落智能海绵夹具装置,包括传送组件和夹具组件,所述传送组件放置在所述夹具组件下方。
6.所述传送组件包括支撑架、传动辊、张紧辊、传送带和减速电机,所述支撑架安装有所述传动辊和张紧辊,所述传送带套装在所述传动辊和张紧辊上,所述减速电机固定安装在所述支撑架的外表面上,所述减速电机通过皮带传动连接所述传动辊,所述支撑架下表面安装有底座。
7.所述夹具组件包括主支架、滑动装置一、滑动装置二、滑动装置三、滑动杆、安装平台、抱紧板、电动推杆和传感器,所述主支架上放置在所述传送组件上方,所述主支架上表面安装有所述滑动装置一,所述滑动装置一上安装有滑块一,所述滑块一上安装有所述滑动装置二,所述滑动装置二上安装有滑块二,所述滑块二上安装有所述滑动装置三,所述滑动装置三上安装有滑动杆,所述滑动杆下端固定连接所述安装平台,所述安装平台下表面对称安装有两个固定架,两个所述固定架上均安装有滑动轴,两个所述抱紧板上均设置有和滑动轴相配合的通孔,两个所述抱紧板通过所述通孔套装在对应的所述滑动轴上,所述安装平台下表面安装有两个所述电动推杆,两个所述电动推杆的伸缩端连接对应的所述抱紧板,所述主支架上安装有所述传感器,所述传感器检测端正对所述传送带。
8.优选的,所述主支架下表面安装有固定垫脚,且所述固定垫脚通过螺栓固定在地面上。
9.优选的,所述抱紧板表面开设有长条形的减重孔,多个所述减重孔依次排列在所述抱紧板的表面上。
10.优选的,所述抱紧板的表面上开设有可供电动推杆通过的方形槽,且所述抱紧板侧表面设置有多个圆形凸起。
11.优选的,所述主支架上表面的两端设置有限位架。
12.优选的,所述滑动轴两端均设置有限位块。
13.优选的,所述支撑架上设置有滑动槽,所述张紧辊两端放置在所述滑动槽内,所述
张紧辊在所述滑动槽内的部分一端弹压有压缩弹簧,另一端抵触有调节螺栓,且所述调节螺栓可拆卸连接所述滑动槽。
14.优选的,所述主支架一侧放置有控制箱,所述控制箱内部安装有可编程控制器,且所述可编程控制器分别电性连接减速电机、滑动装置一、滑动装置二、滑动装置三、电动推杆和传感器。
15.与现有技术相比,本实用新型的有益效果是:通过减速电机可以使传送带转动,无需手动,提高工作效率;传送带可运输海绵,无需人工搬运,节省成本;传感器可感应海绵所在的位置,夹具抓取更准确;电动推杆可移动抱紧板,使抱紧板抱紧海绵,对海绵进行加工或者是移动,电力推动,使用方便,性价比较高,值得推广使用。
附图说明
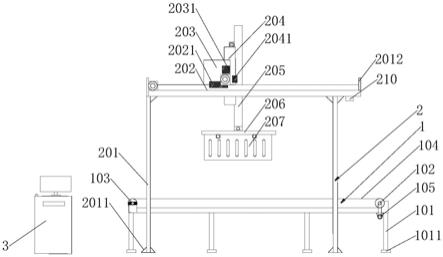
16.图1为本实用新型的整体结构正视图;
17.图2为本实用新型的整体结构侧视图;
18.图3为本实用新型的抱紧板结构图;
19.图4为本实用新型的张紧辊结构图;
20.图中:1
‑
传送组件、101
‑
支撑架、1011
‑
底座、1012
‑
滑动槽、102
‑
传动辊、103
‑
张紧辊、1031
‑
调节螺栓、1032
‑
压缩弹簧、104
‑
传送带、105
‑
减速电机、2
‑
夹具组件、201
‑
主支架、2011
‑
固定垫脚、2012
‑
限位架、202
‑
滑动装置一、2021
‑
滑块一、203
‑
滑动装置、2031
‑
滑块二、204
‑
滑动装置三、2041
‑
滑块三、205
‑
滑动杆、206
‑
安装平台、2061
‑
固定架、207
‑
抱紧板、2071
‑
减重孔、2072
‑
方形槽、2073
‑
凸起、208
‑
电动推杆、209
‑
滑动轴、2091
‑
限位块、3
‑
控制箱。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.请参阅图1
‑
4,本实用新型提供一种技术方案:一种防脱落智能海绵夹具装置,包括传送组件1和夹具组件2,传送组件2放置在夹具组件2下方。
23.传送组件1包括支撑架101、传动辊102、张紧辊103、传送带(104)和减速电机105,支撑架101安装有传动辊102和张紧辊103,传送带104套装在传动辊102和张紧辊103上,减速电机105固定安装在支撑架101的外表面上,减速电机105通过皮带传动连接传动辊102,支撑架101下表面安装有底座1011。
24.夹具组件包括主支架201、滑动装置一202、滑动装置二203、滑动装置三204、滑动杆205、安装平台206、抱紧板207、电动推杆208和传感器210,主支架201上放置在传送组件1上方,主支架201上表面安装有滑动装置一202,滑动装置一202上安装有滑块一2021,滑块一2021上安装有滑动装置二203,滑动装置二203上安装有滑块二2031,滑块二2031上安装有滑动装置三204,滑动装置三204上安装有滑动杆205,滑动杆205下端固定连接安装平台206,安装平台206下表面对称安装有两个固定架2061,两个固定架2061上均安装有滑动轴209,两个抱紧板207上均设置有和滑动轴209相配合的通孔,两个抱紧板207通过通孔套装
在对应的所述滑动轴209上,安装平台206下表面安装有两个电动推杆208,两个电动推杆208的伸缩端连接对应的抱紧板207,主支架201上安装有传感器210,传感器210检测端正对传送带104。
25.在本实施方式中,传感器210感应下方是否有物体,并传输信号给可编程控制器,传感器210可以是型号为p228电红外传感器,滑动装置一202、滑动装置二203、滑动装置三204内均安装有滚珠丝杠和步进电机,步进电机带动滚珠丝杠转动实现滑块一2021、滑块二2031、滑块三2041的滑动,从而调整滑动装置二203、滑动装置三204、滑动杆205的位置,且滚珠丝杠可以采用型号为rxs
‑
40的精密滚珠丝杆,其配套的驱动器、控制器以及连轴器可以由同一厂家提供,进步电机可以是产品型号为862f156的步进电机,其配套的电路和电源可以由同一厂家提供;电动推杆208可以是型号为rla220的折叠式电动推杆,其所需的适配电源可以由同一厂家提供,电动推杆208可通过自身伸缩从而移动抱紧板207,使抱紧板207夹持海绵,节省人力,减速电机105传输动力给传动辊102,时传动辊102带动传送带104传动运输海绵,效率更高,节省成本。
26.进一步的,主支架201下表面安装有固定垫脚2011,且固定垫脚2011通过螺栓固定在地面上。
27.在本实施方式中,垫脚2011固定在底面上,增强主支架201的刚性,减缓装置工作时产生的震动。
28.进一步的,抱紧板207表面开设有长条形的减重孔2071,多个减重孔2071依次排列在抱紧板207的表面上。
29.在本实施方式中,减重孔2071减少抱紧板207的重量,使抱紧板207可抱紧更多的海绵,在保证抱紧板207的机械强度下,对减重孔2071的数量不做要求。
30.进一步的,抱紧板207的表面上开设有可供电动推杆208通过的方形槽2072,且抱紧板207侧表面设置有多个圆形凸起2073。
31.在本实施方式中,方形槽2072可使抱紧板207在运动时不碰撞电动推杆208,使电动推杆208由方形槽2072处通过,圆形凸起2073可增强抱紧板207的摩擦力,防止抱紧时海绵下落。
32.进一步的,主支架201上表面的两端设置有限位架2012。
33.在本实施方式中,限位架2012限制防止滑块一2021在滑动装置一202上的位置,防止滑块一2021掉落。
34.进一步的,滑动轴209两端均设置有限位块2091。
35.在本实施方式中,限位块2091限制抱紧板207的移动位置,防止抱紧板207掉落。
36.进一步的,支撑架101上设置有滑动槽1012,张紧辊103两端放置在滑动槽1012内,张紧辊103在滑动槽1012内的部分一端弹压有压缩弹簧1032,另一端抵触有调节螺栓1031,且调节螺栓1031可拆卸连接滑动槽1012。
37.在本实施方式中,可通过转动调节螺栓1031控制张紧辊103在滑动槽10121内的位置,压缩弹簧1032根据自身弹性回弹张紧辊103,从而时张紧辊13张紧传送带104,放置传送带104打滑。
38.进一步的,主支架201一侧放置有控制箱3,控制箱3内部安装有可编程控制器,且可编程控制器分别电性连接减速电机105、滑动装置一202、滑动装置二203、滑动装置三
204、电动推杆208和传感器210。
39.在本实施方式中,可编程控制器可以是有基恩士生产的型号为kv
‑
8000的可编程控制器,且可编程控制器可以配备计算机,并可以通过计算机编写可编程控制器,可编程控制器可控制减速电机105、滑动装置一202、滑动装置二203、滑动装置三204和电动推杆208电源,并预设滑动装置一202、滑动装置二203和滑动装置三204的移动位置,且可接收传感器210传输的信号。
40.本实用新型的工作原理及使用流程:本实用新型安装好过后,接通电源,将需要夹持的海绵放置在传送带104上,减速电机105通过皮带带动传动辊102转动,传动辊102带动传送带104转动,从而带动张紧辊103转动,传送带104使海绵移动,当海绵经过传感器210下方时,传感器210传输信号给可编程控制器,可编程控制器关闭减速电机105的电源,传送带104停止转动,可编程控制器依次控制滑动装置一202和滑动装置二203移动,使伸缩杆205移动到海绵上方,控制滑动装置三204使伸缩杆205下落,同时可编程控制器控制电动推杆208伸长,带动抱紧板207在滑动轴209上平移,两个抱紧板207相互远离,当伸缩杆205下降到预设位置时,电动推杆208收缩带动抱紧板207在滑动轴209上滑动,两个抱紧板207相互靠近夹持海绵,可编程控制器控制滑动装置一202、滑动装置二204、滑动装置三205设滑动杆205移动预先设置位置,原理传送带104,对海绵进行加工,或者控制电动推杆208松开海绵对海绵进行移动,之后通过可编程控制器打开减速电机105,传送带继续运输海绵,重复夹持海绵,从而完成了一种防脱落智能海绵夹具装置运行的全过程。
41.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1