工业机器人装调维护实训装置的制作方法
1.本实用新型涉及机器人领域,特别是涉及一种工业机器人装调维护实训装置。
背景技术:
2.随着机器人技术的发展,机器人智能性越来越重要,避开障碍是机器人智能化的一个重要指标。避障是机器人进行决策规划和运动控制等高级智能行为的基础,对于在复杂环境或者未知环境中的导航非常重要。当前机器人避障存在的问题包括:仅仅依赖单一的传感器,且传感器出现故障或采集到的传感信号收到干扰时无法实现机器人的精准避障。因此,亟需一种工业机器人装调维护实训装置来解决上述问题。
技术实现要素:
3.为了解决上述问题,本实用新型的目的是提供一种工业机器人装调维护实训装置,可以提高机器人避障的安全性能。
4.基于此,本实用新型提供了一种工业机器人装调维护实训装置,所述装置包括:
5.依次相连的超声波测距传感器,信号调整电路、微控制器,所述微控制器还分别与行走控制器、无线收发器、全景摄像头相连;
6.所述信号调整电路包括依次相连的采样电路、带通滤波电路、第一放大电路、隔离电路、第二放大电路和稳压电路,所述超声波测距传感器和全景摄像头均安装于机器人前部,所述超声波测距传感器采集到的传感信号通过所述信号调整电路的调整之后发送至所述微控制器,所述全景摄像头采集机器人前部图像信号并将所述图像信号上传至外部上位机,外部上位机对所述图像信号进行分析之后发送图像控制信号至所述微控制器,所述微控制器对所述传感信号及图像控制信号进行分析之后发送控制指令至所述行走控制器,所述行走控制器控制机器人的行走。
7.其中,所述采样电路包括:信号采样器,所述信号采样器的电源端接电压vcc1,所述信号采样器的接地端接地,所述信号采样器的输出端接所述带通滤波电路。
8.其中,所述信号采样器为型号为dam
‑
3056ah的信号采样器。
9.其中,所述带通滤波电路包括:第一电容、第二电容、第三电容、第四电容、第五电容、第六电容、第七电容、第一电感、第二电感;所述第一电容的一端连接所述采样电路的输出端,另一端分别连接所述第二电容的一端、所述第一电感的一端、第四电容的一端,所述第二电容的另一端接地,所述第一电感的另一端连接所述第三电容的一端,所述第三电容的另一端接地,所述第四电容的另一端分别连接所述第二电感的一端、所述第六电容的一端、所述第七电容的一端,所述第二电感的另一端连接所述第五电容的一端,所述第五电容的另一端接地,所述第六电容的另一端接地,所述第七电容的另一端连接所述第一放大电路的输入端。
10.其中,所述第一放大电路包括:型号为spf5043z放大器芯片。
11.其中,所述隔离电路包括:第一运放器;所述第一运放器的同相输入端与所述第一
放大电路的输出端相连,所述第一运放器的反相输入端与所述第一运放器的输出端相连,所述第一运放器的输出端与所述第二放大电路相连。
12.其中,所述第二放大电路包括:第一电阻、第二电阻、第三电阻、第一三极管;所述第一电阻的一端连接所述隔离电路的输出端,另一端分别连接所述第一三极管的基极、所述第二电阻的一端,所述第二电阻的另一端连接外部电压vcc2,所述第一三极管的集电极连接外部电压vcc2,所述第一三极管的发射极分别连接所述稳压电路的输入端、所述第三电阻的一端,所述第三电阻的另一端接地。
13.其中,所述稳压电路包括:稳压芯片、第八电容、第九电容;所述稳压芯片的第一端连接所述第八电容的一端,所述稳压芯片的第二端连接所述第九电容的一端,所述第八电容的另一端、所述第九电容的另一端、所述稳压芯片的第三端均接地。
14.采用本实用新型,所述超声波测距传感器用于采集机器人前方障碍物与机器人之间的包含距离信息的传感信号,所述传感信号可能包含干扰信号或者所述超声波测距传感器损坏导致的错误信号,故所述传感信号经所述信号调整电路进行信号调整去除干扰信号或错误信号后输入至所述微控制器,所述微控制器才能对所述传感信号进行精准分析,除此之外,机器人前部位置的全景摄像头采集到的图像信号上传至外部上位机,外部上位机可以对所述图像信号进行分析之后发送图像控制信号至所述微控制器,所述微控制器对所述传感信号以及所述图像控制信号进行分析之后,发送控制指令至所述行走控制器,所述行走控制器控制机器人的行走。采用本实用新型,不单单仅从所述超声波测距传感器出发来控制机器人的行走状态,而是根据全景摄像头采集到的图像信号,根据对图像信号的分析结果以及传感信号来更加全面的分析机器人是否应该行走以及如何行走等行走状态,提高了机器人的行走安全性能,避免机器人行走至泥泞、有污水等恶劣地带。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
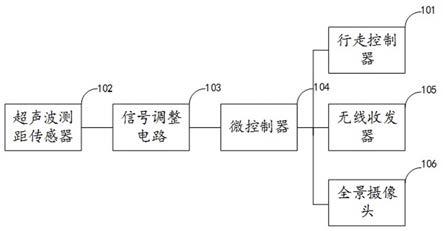
16.图1是本实用新型实施例提供的工业机器人装调维护实训装置的示意图;
17.图2是本实用新型实施例提供的信号调整电路的示意图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.图1是本实用新型实施例提供的工业机器人装调维护实训装置的示意图,所述装置包括:
20.依次相连的超声波测距传感器101,信号调整电路102、微控制器103,所述微控制器103还分别与行走控制器104、无线收发器105、全景摄像头106相连;
21.所述信号调整电路102包括依次相连的采样电路、带通滤波电路、第一放大电路、隔离电路、第二放大电路和稳压电路,所述超声波测距传感器101和全景摄像头106均安装于机器人前部,所述超声波测距传感器101采集到的传感信号通过所述信号调整电路102的调整之后发送至所述微控制器103,所述全景摄像头106采集机器人前部图像信号并将所述图像信号上传至外部上位机,外部上位机对所述图像信号进行分析之后发送图像控制信号至所述微控制器103,所述微控制器103对所述传感信号及图像控制信号进行分析之后发送控制指令至所述行走控制器104,所述行走控制器104控制机器人的行走。
22.图2是本实用新型实施例提供的信号调整电路的示意图,所述信号调整电路包括:依次相连的采样电路、带通滤波电路、第一放大电路、隔离电路、第二放大电路和稳压电路;
23.其中,所述采样电路包括:信号采样器,所述信号采样器的电源端接电压vcc1,所述信号采样器的接地端接地,所述信号采样器的输出端接所述带通滤波电路。
24.其中,所述信号采样器为型号为dam
‑
3056ah的信号采样器。
25.其中,所述带通滤波电路包括:第一电容c1、第二电容c2、第三电容c3、第四电容c4、第五电容c5、第六电容c6、第七电容c7、第一电感、第二电感;所述第一电容c1的一端连接所述采样电路的输出端,另一端分别连接所述第二电容c2的一端、所述第一电感的一端、第四电容c4的一端,所述第二电容c2的另一端接地,所述第一电感的另一端连接所述第三电容c3的一端,所述第三电容c3的另一端接地,所述第四电容c4的另一端分别连接所述第二电感的一端、所述第六电容c6的一端、所述第七电容c7的一端,所述第二电感的另一端连接所述第五电容c5的一端,所述第五电容c5的另一端接地,所述第六电容c6的另一端接地,所述第七电容c7的另一端连接所述第一放大电路的输入端。
26.其中,所述第一放大电路包括:型号为spf5043z放大器芯片。
27.其中,所述隔离电路包括:第一运放器ar1;所述第一运放器ar1的同相输入端与所述第一放大电路的输出端相连,所述第一运放器ar1的反相输入端与所述第一运放器ar1的输出端相连,所述第一运放器ar1的输出端与所述第二放大电路相连。
28.其中,所述第二放大电路包括:第一电阻r1、第二电阻r2、第三电阻r3、第一三极管t1;所述第一电阻r1的一端连接所述隔离电路的输出端,另一端分别连接所述第一三极管t1的基极、所述第二电阻r2的一端,所述第二电阻r2的另一端连接外部电压vcc2,所述第一三极管t1的集电极连接外部电压vcc2,所述第一三极管t1的发射极分别连接所述稳压电路的输入端、所述第三电阻r3的一端,所述第三电阻r3的另一端接地。
29.其中,所述稳压电路包括:稳压芯片、第八电容c8、第九电容c9;所述稳压芯片的第一端连接所述第八电容c8的一端,所述稳压芯片的第二端连接所述第九电容c9的一端,所述第八电容c8的另一端、所述第九电容c9的另一端、所述稳压芯片的第三端均接地。
30.采用本实用新型,所述超声波测距传感器用于采集机器人前方障碍物与机器人之间的包含距离信息的传感信号,所述传感信号可能包含干扰信号或者所述超声波测距传感器损坏导致的错误信号,故所述传感信号经所述信号调整电路进行信号调整去除干扰信号或错误信号后输入至所述微控制器,所述微控制器才能对所述传感信号进行精准分析,除此之外,机器人前部位置的全景摄像头采集到的图像信号上传至外部上位机,外部上位机可以对所述图像信号进行分析之后发送图像控制信号至所述微控制器,所述微控制器对所述传感信号以及所述图像控制信号进行分析之后,发送控制指令至所述行走控制器,所述
行走控制器控制机器人的行走。采用本实用新型,不单单仅从所述超声波测距传感器出发来控制机器人的行走状态,而是根据全景摄像头采集到的图像信号,根据对图像信号的分析结果以及传感信号来更加全面的分析机器人是否应该行走以及如何行走等行走状态,提高了机器人的行走安全性能,避免机器人行走至泥泞、有污水等恶劣地带。
31.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1