助老起坐式移动护理机器人装置的制作方法
1.本实用新型涉及护理机器人领域,更为具体地,本实用新型涉及一种助老起坐式移动护理机器人装置。
背景技术:
2.随着我国进入老龄化社会,社会老年人占比急剧增长,养老护老问题成为我国医护领域的一大难题,针对行动不便老年人的转运转移场合,转运护理机器人应运而生。转运护理机器人能够辅助护理人员完成对病患/老年人群的特殊检查、挪动、转床等高强度、高技术含量的的工作,改善护理质量和效率,降低护理费用、具有深远的社会意义和巨大的应用价值。
3.根据病患的受伤部位、护理要求、转运场景以及机器人的结构特点,现有的转运护理机器人可分为五大类,即:对不适合直接接触转运的患者,如骨折或皮肤损伤的患者,开发了可将床体整体搬运的床臂结合型转运护理机器人;对休克、麻醉及昏迷等失去自主行动能力的病患,研制出配有传送带的板式转运床;为满足失能老人的日常自理需求推出了床椅分离型护理床;针对多场景、多样化的护理要求,提出护理机器人装置,从最大化减轻患者身心负担的角度出发,设计了移动护理机器人系统。本实用新型提出一种助老起坐式移动护理机器人装置,可帮助无法自主站立的患者进行转移转运,避免搬动患者时可能造成的二次损伤、提高医护效率。
4.移动护理机器人起步较晚,但因其具有巨大的应用潜力,一经研发,便迅速投入市场应用。当前,移动护理机器人虽然应用逐渐扩大,但其移动效果、方便程度均有待改进,所以,设计出一种简单方便且经济实惠的移动护理机器人具有重要的意义。
技术实现要素:
5.针对现有技术中存在的问题,本实用新型的目的在于提供一种助老起坐式移动护理机器人装置,将移动底盘与移动护理机器人系统结合起来,本实用新型的结构新颖,其具有动作灵活,护理转运安全,适用人群广,地形适应性强等优点。
6.为实现上述目的,本实用新型提供了如下方案:
7.一种助老起坐式移动护理机器人装置,其包括四部分,分别是底盘部分、主体升降部分、辅助支撑部分与整体结构外壳部分;其中整体结构左右对称,主体升降部分、辅助支撑部分与外壳部分都安装在底盘部分之上,通过底盘部分内置电机进行驱动。
8.优选地,所述底盘部分包括底盘轮、底盘外壳、底盘转盘、推力轴承、推力轴承套、底盘运动驱动电机、底盘转向电机、底盘光轴电机、丝杠挡板、直线导轨与导轨滑块等,通过内置于底盘外壳之中的底盘运动驱动电机进行驱动,使助老起坐式机器人前后移动,底盘转向电机同样置于底盘外壳中,通过推力轴承控制与推力轴承相连的底盘转盘转动,底盘转盘上方置有底盘光轴电机与丝杠挡板,底盘光轴电机工作时带动与其相连的主体升降部分进行直线运动,方向与底盘运动方向相同。底盘转盘转动时,因与主体升降部分相连,可
使主体升降部分产生一定程度的转动,提高助老起坐式移动护理机器人自由度。将底盘轮、底盘电机、底盘传动装置安装于底盘外壳内部,将推力轴承与推力轴承套安装于底盘外壳上方,将底盘转盘安装于推力轴承与推力轴承套上方,将底盘光轴电机、丝杠挡板、直线导轨与导轨滑块安装于底盘转盘上方,所述底盘部分便安装完成。
9.优选地,所述主体升降部分包括剪叉机构、伸缩套、电动推杆等。电动推杆置于剪叉机构之上,推动剪叉机构进行上升与下降运动。伸缩套安装于剪叉机构外侧,轴向方向与剪叉机构伸缩方向相同,从而保证剪叉机构正常运行。
10.优选地,所述辅助支撑部分包括液压罩、液压杆、液压杆底部轴、光轴座、液压杆顶部罩、支撑板与把手等组成。光轴座安装于剪叉机构顶部平板上方,液压杆一侧通过液压杆底部轴与光轴座相连,另一侧通过液压杆顶部罩与支撑板相连,支撑板上安装有把手供患者扶握,工作过程中,患者靠在支撑板上,双手紧握把手,液压杆作用推动支撑板转动,从而帮助患者站立。液压罩安装于上述系统外部,保证患者安全性。
11.优选地,所述外壳部分安装于底盘部分之上,主体伸缩部分之外,起到保护患者的作用,同时还可确保机器人系统正常运行不受干扰。
12.优选地,所述底盘部分采用单个电机控制,只可进行前后移动,不可转向,整体结构简单,维修护理方便。
13.优选地,机器人整体驱动装置包括一个底盘运动驱动电机,一个底盘转向电机,一个底盘光轴电机,一个电动推杆,一个液压杆。其中底部运动驱动电机负责机器人前后移动,底盘转向电机负责控制主体升降机构的旋转,底部光轴电机可负责主体升降部分相对底盘部分沿机器人运动方向的运动,电动推杆负责推动剪叉机构进行运动,实现该机器人系统整体高度的升降,电动推杆负责控制支撑板转动的角度,帮助患者转移。
14.优选地,所述底盘部分外壳、整体结构外壳部分、伸缩套与液压罩部分均进行圆角处理,保证与患者接触过程中的安全性,提高助老起坐式移动护理机器人的人机交互性。
15.本实用新型相对于现有技术取得了以下有益技术效果:
16.本实用新型的助老起坐式移动护理机器人装置,与现有技术相比具有以下优点:
17.1.安全性:本实用新型与病患相接触处均采用柔性装置,连接板外形符合人体工学设计,具有高度人体亲和性,辅助支撑部分转动速度适当,可保证患者移动过程中的安全性。
18.2.简易性:本实用新型组成零件少,已获得,价格低廉,维修与安装都较为方便。
19.3.经济性:本实用新型尽量选用标准件,材料价格低廉,成本低。
20.4.适应性强:本实用新型变形程度高,角度覆盖完全,整体结构具有四个自由度,可实现机器人整体部分的升降、主体升降部分的转动
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
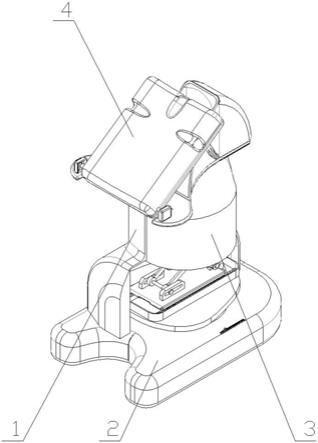
22.图1为根据本实用新型的助老起坐式移动护理机器人整体结构立体示意图(外壳
部分半剖);
23.图2为根据本实用新型的助老起坐式移动护理机器人底盘结构立体示意图;
24.图3为根据本实用新型的助老起坐式移动护理机器人底盘结构右视图;
25.图4为根据本实用新型的助老起坐式移动护理机器人主体升降部分立体示意图(伸缩套半剖);
26.图5为根据本实用新型的助老起坐式移动护理机器人辅助支撑部分右视图(液压罩半剖);
27.图中:1
‑
外壳部分、2
‑
底盘部分、3
‑
主体升降部分、4
‑
辅助支撑部分、21
‑
底盘外壳、22
‑
底盘转盘、23
‑
丝杠挡板、24
‑
导轨滑块、25
‑
直线导轨、26
‑
底盘光轴电机,27
‑
底盘轮、28
‑
推力轴承与推力轴承套装配体、31
‑
剪叉机构、32
‑
电动推杆、33
‑
伸缩套、41
‑
支撑板、42
‑
把手、43
‑
液压杆顶部罩、44
‑
液压罩、45
‑
液压杆、46
‑
光轴座、47
‑
液压杆底部轴。
具体实施方式
28.在图1至图5所示的根据本实用新型的助老起坐式移动护理机器人装置包括四部分,分别是底盘部分、主体升降部分、辅助支撑部分与整体结构外壳部分;其中整体结构左右对称,主体升降部分、辅助支撑部分与外壳部分都安装在底盘部分之上,通过底盘部分内置电机进行驱动。
29.优选地,所述底盘部分包括底盘轮、底盘外壳、底盘转盘、推力轴承、推力轴承套、底盘运动驱动电机、底盘转向电机、底盘光轴电机、丝杠挡板、直线导轨与导轨滑块等,通过内置于底盘外壳之中的底盘运动驱动电机进行驱动,使助老起坐式机器人前后移动,底盘转向电机同样置于底盘外壳中,通过推力轴承控制与推力轴承相连的底盘转盘转动,底盘转盘上方置有底盘光轴电机与丝杠挡板,底盘光轴电机工作时带动与其相连的主体升降部分进行直线运动,方向与底盘运动方向相同。底盘转盘转动时,因与主体升降部分相连,可使主体升降部分产生一定程度的转动,提高助老起坐式移动护理机器人自由度。将底盘轮、底盘电机、底盘传动装置安装于底盘外壳内部,将推力轴承与推力轴承套安装于底盘外壳上方,将底盘转盘安装于推力轴承与推力轴承套上方,将底盘光轴电机、丝杠挡板、直线导轨与导轨滑块安装于底盘转盘上方,所述底盘部分便安装完成。
30.优选地,所述主体升降部分包括剪叉机构、伸缩套、电动推杆等。电动推杆置于剪叉机构之上,推动剪叉机构进行上升与下降运动。伸缩套安装于剪叉机构外侧,轴向方向与剪叉机构伸缩方向相同,从而保证剪叉机构正常运行。
31.优选地,所述辅助支撑部分包括液压罩、液压杆、液压杆底部轴、光轴座、液压杆顶部罩、支撑板与把手等组成。光轴座安装于剪叉机构顶部平板上方,液压杆一侧通过液压杆底部轴与光轴座相连,另一侧通过液压杆顶部罩与支撑板相连,支撑板上安装有把手供患者扶握,工作过程中,患者靠在支撑板上,双手紧握把手,液压杆作用推动支撑板转动,从而帮助患者站立。液压罩安装于上述系统外部,保证患者安全性。
32.优选地,所述外壳部分安装于底盘部分之上,主体伸缩部分之外,起到保护患者的作用,同时还可确保机器人系统正常运行不受干扰。
33.优选地,所述底盘部分采用单个电机控制,只可进行前后移动,不可转向,整体结构简单,维修护理方便。
34.优选地,机器人整体驱动装置包括一个底盘运动驱动电机,一个底盘转向电机,一个底盘光轴电机,一个电动推杆,一个液压杆。其中底部运动驱动电机负责机器人前后移动,底盘转向电机负责控制主体升降机构的旋转,底部光轴电机可负责主体升降部分相对底盘部分沿机器人运动方向的运动,电动推杆负责推动剪叉机构进行运动,实现该机器人系统整体高度的升降,电动推杆负责控制支撑板转动的角度,帮助患者转移。
35.优选地,所述底盘部分外壳、整体结构外壳部分、伸缩套与液压罩部分均进行圆角处理,保证与患者接触过程中的安全性,提高助老起坐式移动护理机器人的人机交互性。
36.在图1至图5所示所示的根据本实用新型的助老起坐式移动护理机器人装置的中,其包括四部分,分别是底盘部分、主体升降部分、辅助支撑部分与外壳部分。其中主体升降部分安装于底盘部分顶部,主体升降部分剪叉机构底部与底盘部分顶部导轨滑块相连,滑动方向与机器人运动方向相同。辅助支撑部分安装在主体升降部分顶部,由液压杆控制运动。外壳部分安装于主体升降部分外部,底盘部分之上,在底盘光轴电机作用下随主体升降部分同步运动。
37.优选地,所述外壳部分整体采用硬质塑料材料,质量轻且与人体亲和性较好,外壳部分均进行圆角处理,避免对患者造成二次伤害。
38.具体地,底盘部分中所述推力轴承与推力轴承套装配体28安装于底盘外壳21之上,由底盘外壳内置电机进行控制,可整体转动其上部的整体结构,底盘转盘22和推力轴承与推力轴承套装配体28固连,起到支撑其上方主体升降部分3、辅助支撑部分4与外壳部分1的作用。底盘轮27由底盘外壳内置电机控制,可进行前后移动,无法转弯。
39.具体地,主体升降部分由剪叉机构31、电动推杆32与伸缩套33相连,电动推杆32一端安装在剪叉机构底板上,另一端连接至剪叉机构31执行部分,通过电动推杆32作用控制剪叉机构运动。伸缩套33部分为圆周对称结构,整体为“圆筒+圆台”形状,安装在剪叉机构31外部,轴线方向与剪叉机构31运动方向平行,可保护剪叉机构31运动不被外部条件所干扰。剪叉机构31底板与底盘部分2的导轨滑块24相连,与其同步受底盘光轴电机26的控制前后移动。
40.具体地,所述辅助支撑部分4包括支撑板41、把手42、液压杆顶部罩43、液压罩44、液压杆45、光轴座46与液压杆底部轴47组成,整体由液压杆45控制,液压杆45一端安装于剪叉机构31顶部,另一端与液压杆顶部罩43连接,液压杆顶部罩43与支撑板41相连,液压杆45工作时,通过液压杆顶部罩控制支撑板41角度变化,从而帮助患者进行移动工作。
41.具体地,所述外壳部分为一个零件,起到整体结构的保护作用,整体进行圆角处理,较为安全。
42.优选地,所述推力轴承与推力轴承套装配体28、直线导轨25、导轨滑块24等均采用标准件,降低成本且方便维护。
43.优选的,辅助支撑部分4的支撑板41采用软体结构,提高了其人体亲和性,使患者移动过程中更加舒适。
44.如图1所示,根据本实用新型的助老起坐式移动护理机器人整体安装方式如图,包括四大部分:外壳部分1、底盘部分2、主体升降部分3、辅助支撑部分4.通过底盘光轴电机26、电动推杆32与液压杆45进行驱动。
45.如图2、3所示,底盘部分2结构份为四层,第一层为底盘外壳21,其上为第二层推力
轴承与推力轴承套装配体28,其上为第三层底盘转盘23,其上为第四层丝杠挡板23、导轨滑块24、直线导轨25与底盘光轴电机26,底盘部分其到机器人整体的支撑作用与整体运动驱动。
46.如图4所示,主体升降部分3整体结构较为简单,电动推杆32推动剪叉结构31进行运动,实现整体结构的升降,伸缩套33起保护作用。
47.如图5所示,辅助支撑部分4安装于机器人最顶部,可实现机器人的核心功能,通过液压杆45工作带动支撑板41角度转动,从而实现对患者的移动。
48.需要理解的是在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。术语“第一”、“第二”、“第三”等仅用于简化文字描述以区别于类似的对象,而不能理解为特定的次序间的先后关系。
49.本实用新型应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1