一种用于全自动清洗设备的防撞机械臂的制作方法
1.本实用新型属于清洗设备开发技术领域,具体涉及一种用于全自动清洗设备的防撞机械臂。
背景技术:
2.清洗设备是指可用于替代人工来清洁工件表面油、蜡、尘、氧化层等污渍与污迹的机械设备。市面上所见到清洗设备为:超声波清洗、高压喷淋清洗、激光清洗、蒸汽清洗、干冰清洗及复合型清洗设备等;其中应用领域最广泛的当属喷淋清洗和超声波清洗;在工业生产及电子产品的生产过程中,随着对产品部件表面清洁度的提高,超声波精密清洗方式正越来越多的人们所关注和认可。
3.在全自动的清洗设备中,通常会用机械臂来取料进行清洗,然而,机械臂在工作的过程中容易发生碰撞,而且与设备发生撞击故障无法进行判断,也无法进行产品的保护,一但发生类似撞击,不仅清洗的产品会受到伤害,同时对于整个机械臂也是致命的,会导致机械臂变形甚至损坏。
4.因此,设计了一种用于全自动清洗设备的防撞机械臂来解决上述问题。
技术实现要素:
5.为克服上述现有技术中的不足,本实用新型目的在于提供一种用于全自动清洗设备的防撞机械臂。
6.为实现上述目的及其他相关目的,本实用新型提供的技术方案是:一种用于全自动清洗设备的防撞机械臂,包括安装板,所述安装板与横梁臂的一端连接,所述横梁臂的另一端连接有竖向设置的主臂,所述主臂与所述横梁臂之间通过一摇摆组件摆动连接,所述摇摆组件一侧设置有感应件,所述主臂的下端设置有用于放置待清洗件的取挂件。
7.优选的技术方案为:所述摇摆组件包括第一摇摆件和第二摇摆件,所述第一摇摆件固定在所述横梁臂的一端,所述第一摇摆件上开设有连通的安装槽和v型槽,所述第二摇摆件设置有v型块,所述v型块设置在所述v型槽内,所述主臂上端通过所述安装槽与所述第二摇摆件相连。
8.优选的技术方案为:所述主臂上设置有柔性防撞装置。
9.优选的技术方案为:所述柔性防撞装置由若干个弹簧组合而成。
10.优选的技术方案为:所述v型槽的v型开口角度大于所述v型块的v型角度。
11.优选的技术方案为:所述取挂件包括与所述主臂连接的连接板,所述连接板的两侧均设置有挂杆。
12.由于上述技术方案运用,本实用新型与现有技术相比具有的优点是:
13.本实用新型设计的防撞机械臂,从电气和机械两个方面进行保护,当该机械臂的取挂件发生左右碰撞时,主臂带动部分摇摆组件进行左右偏移,摇摆组件一侧的感应件感应到物体后动作,系统可以控制设备紧急停止;该机械臂还配有机械保护机构,当机械臂的
取挂件发生左右碰撞时,柔性防撞装置可以一定限度的发生形变,此形变有柔性矩形弹簧实现,可以通过机械结构的方式保护机械手臂不受撞击损坏。
附图说明
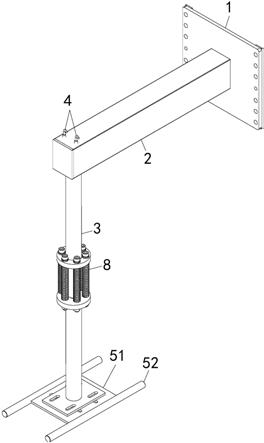
14.图1为本实用新型立体示意图。
15.图2为本实用新型侧视图。
16.图3为本实用新型俯视图。
17.图4为a
‑
a剖视图。
18.以上附图中,安装板1,横梁臂2,主臂3,感应件4,取挂件5,连接板51,挂杆52,第一摇摆件6,第二摇摆件7,柔性防撞装置8。
具体实施方式
19.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
20.请参阅图1~图4。须知,在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
21.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
22.如图1 ~图4所示,一种用于全自动清洗设备的防撞机械臂,包括安装板1,安装板1与横梁臂2的一端连接,横梁臂2的另一端连接有竖向设置的主臂3,主臂3与横梁臂2之间通过一摇摆组件摆动连接,摇摆组件一侧设置有感应件4,主臂3的下端设置有用于放置待清洗件的取挂件5。摇摆组件包括第一摇摆件6和第二摇摆件7,第一摇摆件6固定在横梁臂2的一端,第一摇摆件6上开设有连通的安装槽和v型槽,第二摇摆件7设置有v型块,v型块设置在v型槽内,主臂3上端通过安装槽与第二摇摆件7相连。
23.感应件4的型号为:欧姆龙e2b
‑
m12kn08
‑
wz
‑
c1;接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机装置提供控制指令。
24.原理:第一摇摆件6固定在横梁臂2的前端,第一摇摆件6上开设有连通的安装槽和
v型槽,第二摇摆件7设有v型块并插入第一摇摆件6中;当该机械臂的取挂件5发生左右碰撞时,第二摇摆件7可以在v型槽内进行左右偏移,感应件4(接近开关)感应到物体后动作,系统可以控制设备紧急停止。
25.优选的实施方式为:如图1、2、4所示,主臂3上设置有柔性防撞装置8,柔性防撞装置8由若干个弹簧组合而成。该机械臂还配有机械保护机构,当机械臂的取挂件5发生左右碰撞时,柔性防撞装置8可以一定限度的发生形变,此形变有八个柔性矩形弹簧实现,此时可以通过机械结构的方式保护机械手臂不受撞击损坏。
26.优选的实施方式为:v型槽的v型开口角度大于v型块的v型角度。使得主臂3可以顺利带动部分摇摆组件进行左右偏移,使得感应件4感应到物体后动作,系统可以控制设备紧急停止来保护机械臂。
27.优选的实施方式为:如图1所示,取挂件5包括与主臂3连接的连接板51,连接板51的两侧均设置有挂杆52。便于待清洗件的取挂。
28.本实用新型设计的防撞机械臂,从电气和机械两个方面进行保护,当该机械臂的取挂件发生左右碰撞时,主臂带动部分摇摆组件进行左右偏移,摇摆组件一侧的感应件感应到物体后动作,系统可以控制设备紧急停止;该机械臂还配有机械保护机构,当机械臂的取挂件发生左右碰撞时,柔性防撞装置可以一定限度的发生形变,此形变有柔性矩形弹簧实现,可以通过机械结构的方式保护机械手臂不受撞击损坏。
29.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1