一种用于电站巡检的移动操作装置的制作方法
1.本实用新型涉及一种协作机器人,更具体地说是一种用于电站巡检的移动操作装置。
背景技术:
2.随着科技日新月异的发展,保证电力的正常安全供给显的尤为重要,而变电站电力设备的运行状态好坏、设备出现问题能否及时维修都会影响到电力供给,目前是依靠工作人员人工巡检的方式来完成电站巡检作业,虽然电站有一些基本的保护措施,但是无法保证作业人员的安全性,并且需要投入大量人力物力,容易造成资源的浪费。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决上述技术问题。为此,本实用新型提出一种用于电站巡检的移动操作装置,以期能够代替人工作业的电站巡检方式,以免除人工作业潜在的安全隐患,同时也降低人力物力成本的投入。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种用于电站巡检的移动操作装置,其结构特点是:
6.包括移动底盘组件与安装在移动底盘上的gps天线、激光雷达组件、相机、超声局放检测仪、六轴机械臂、微型计算机及用于供电的电池模块,以电站待检测电力设备为巡检目标;
7.所述移动操作装置以移动底盘组件的移动底盘作为整体基架,在所述移动底盘底部配置四轮独立伺服驱动结构与双横臂独立悬架结构;
8.所述gps天线由gps天线安装架支撑在移动底盘的上方,用于接收卫星信号以定位移动操作装置所在位置;
9.所述激光雷达组件包括由激光雷达安装架支撑在移动底盘上方的陀螺仪、激光雷达与北斗星天线,所述陀螺仪与激光雷达分别用于测量巡检目标所在位置相对移动操作装置所在位置的角度信息与距离信息,所述北斗星天线用于为移动操作装置朝向指定位置的运行提供导航;
10.所述相机由相机安装架支撑在移动底盘其中一侧边的上方,用于获取移动操作装置正前方的图像信息;
11.所述超声局放检测仪安装在移动底盘上端后侧,用于在移动操作装置到达指定位置后检测巡检目标;
12.所述六轴机械臂通过机械臂安装板件安装在移动底盘上端前侧中部,用于在移动操作装置到达指定位置后开关电站按钮;
13.所述微型计算机包括机械臂控制系统、移动底盘控制系统、数据发送模块,用于接收由所述陀螺仪与激光雷达反馈的巡检目标相对位置信息、由所述gps天线反馈的移动操作装置所在位置信息、由所述北斗星天线反馈的导航信息、由所述超声局放检测仪反馈的
检测信息、由所述相机反馈的图像信息,并通过所述数据发送模块与远程控制电脑传输数据,通过所述机械臂控制系统控制六轴机械臂的动作,通过所述移动底盘控制系统控制移动操作装置的运行。
14.本实用新型的结构特点也在于:
15.所述gps天线为蘑菇头天线,安装在gps天线安装架的顶端,位于所述移动底盘的中部上方。
16.所述六轴机械臂于安装座端通过机械臂加强板安装在移动底盘上端的安装垫板上。
17.所述激光雷达组件位于所述移动底盘的后侧中部,所述激光雷达安装架为立杆结构,杆顶端安装所述激光雷达,杆上端部安装所述北斗星天线,杆体在位于所述北斗星天线下方处悬伸一朝向正前方的横杆,在所述横杆外杆端安装所述陀螺仪。
18.所述相机安装架底端通过相机安装板安装在移动底盘上端左侧,摄像端朝向正前方。
19.所述电池模块包括大电池与小电池,所述大电池用于为六轴机械臂与四轮独立伺服驱动结构供电,所述小电池设有多个,用于为移动操作装置除六轴机械臂与四轮独立伺服驱动结构之外的用电设备供电。
20.所述移动底盘其中一侧设有急停按钮。
21.所述微型计算机与超声局放检测仪分设于移动底盘后侧左右端。
22.与已有技术相比,本实用新型有益效果体现在:
23.1、本实用新型以移动底盘组件为移动载体,设有六轴机械臂、gps天线、激光雷达组件、超声局放检测仪、相机、微型计算机、电池模块,通过gps天线定位移动操作装置所在位置,通过激光雷达组件中的陀螺仪与激光雷达获取巡检目标所在位置相对移动操作装置所在位置的角度信息与距离信息,由激光雷达组件中的北斗星天线为移动操作装置的运行导航,由超声局放检测仪检测巡检目标,由相机获取移动操作装置正前方的图像信息,利用六轴机械臂完成对当前巡检目标位置的开关电站按钮动作。通过本实用新型的移动操作装置替代人工作业,免除人工作业的安全隐患,降低人力成本,起到了减负提效的作用;
24.2、本实用新型结构设计紧凑,在移动底盘底部配置四轮独立伺服驱动结构与双横臂独立悬架结构,能够适应崎岖路径,适用于电站巡检作业,适用性与实用性佳。
附图说明
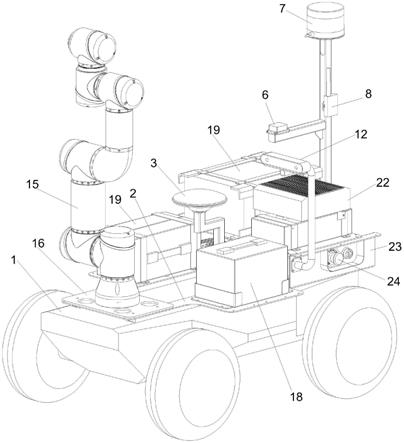
25.图1是本实用新型的立体结构示意图;
26.图2是本实用新型的后视结构示意图;
27.图3是gps天线的结构示意图;
28.图4是相机的结构示意图;
29.图5是激光雷达组件的结构示意图;
30.图6是六轴机械臂的结构示意图;
31.图7是本实用新型的结构框图。
32.图中,1移动底盘;2安装垫板;3 gps天线;4 gps天线安装架;5 gps天线安装板;6陀螺仪;7激光雷达;8北斗星天线;9激光雷达安装架;10横杆;11安装架底板;12相机;13相
机安装架;14相机安装板;15六轴机械臂;16机械臂加强板;17大电池;18小电池;19超声局放检测仪;20“匚”型支架;21“匚”型小支架;22微型计算机;23垫板侧面板;24急停按钮。
具体实施方式
33.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.请参照图1至图7,本实施例的用于电站巡检的移动操作装置包括移动底盘组件与安装在移动底盘1上的gps天线3、激光雷达组件、相机12、超声局放检测仪19、六轴机械臂15、微型计算机22及用于供电的电池模块,以电站待检测电力设备为巡检目标;
35.移动操作装置以移动底盘组件的移动底盘1作为整体基架,在移动底盘1底部配置四轮独立伺服驱动结构与双横臂独立悬架结构;
36.gps天线3由gps天线安装架4支撑在移动底盘1的上方,用于接收卫星信号以定位移动操作装置所在位置;
37.激光雷达组件包括由激光雷达安装架9支撑在移动底盘1上方的陀螺仪6、激光雷达7与北斗星天线8,陀螺仪6与激光雷达7分别用于测量巡检目标所在位置相对移动操作装置所在位置的角度信息与距离信息,北斗星天线8用于为移动操作装置朝向指定位置的运行提供导航;以及可利用激光雷达7为移动操作装置的运行避障;
38.相机12由相机安装架13支撑在移动底盘1其中一侧边的上方,用于获取移动操作装置正前方的图像信息;
39.超声局放检测仪19安装在移动底盘1上端后侧,用于在移动操作装置到达指定位置后检测巡检目标;
40.六轴机械臂15通过机械臂安装板件安装在移动底盘1上端前侧中部,用于在移动操作装置到达指定位置后开关电站按钮;
41.微型计算机22包括机械臂控制系统、移动底盘1控制系统、数据发送模块,用于接收由陀螺仪6与激光雷达7反馈的巡检目标相对位置信息、由gps天线3反馈的移动操作装置所在位置信息、由北斗星天线8反馈的导航信息、由超声局放检测仪19反馈的检测信息、由相机12反馈的图像信息,并通过数据发送模块与远程控制电脑传输数据,通过机械臂控制系统控制六轴机械臂15的动作,通过移动底盘1控制系统控制移动操作装置的运行。
42.具体实施中,相应的结构设置也包括:
43.gps天线3为蘑菇头天线,安装在gps天线安装架4的顶端,位于移动底盘1的中部上方,gps天线安装架4底端通过gps天线安装板5安装在安装垫板2上。
44.移动底盘1上设有安装孔,安装垫板2于安装孔处通过安装螺栓安装在移动底盘1上,安装垫板2于后端部左侧通过螺栓固装有竖置的垫板侧面板23,六轴机械臂15是于安装座端通过机械臂加强板16安装在移动底盘1上端的安装垫板2前端。机械臂加强板16与安装垫板2前端于对应位置处设有适配于六轴机械臂15安装座端的螺纹定位孔,于螺纹定位孔处通过螺栓固接。
45.激光雷达组件位于移动底盘1的后侧中部,激光雷达安装架9为立杆结构,杆顶端安装激光雷达7,杆上端部安装北斗星天线8,杆体在位于北斗星天线8下方处悬伸一朝向正前方的横杆10,在横杆10外杆端安装陀螺仪6。激光雷达安装架9底端通过安装架底板11安装在安装垫板2上。
46.相机安装架13底端通过相机安装板14安装在安装垫板2上端左侧,摄像端朝向正前方。
47.电池模块包括大电池17与小电池18,大电池17用于为六轴机械臂15与四轮独立伺服驱动结构供电,通过电池箍板安装在安装垫板2上,位于移动底盘1的左侧,位于相机12所在位置的前侧;小电池18设有多个,用于为移动操作装置除六轴机械臂15与四轮独立伺服驱动结构之外的用电设备供电,各小电池18的位置依据待供电的用电设备所在位置对应布置。
48.移动底盘1其中一侧设有急停按钮24,急停按钮24安装在右侧的垫板侧面板23上。
49.微型计算机22与超声局放检测仪19分设于移动底盘1后侧左右端。设置“匚”型支架20,“匚”型支架20以开口端朝下,两竖板于底端朝外水平折弯作为安装座端,于安装座端通过螺栓固装在安装垫板2的后端,顶部横板上端右侧安装超声局放检测仪19,左侧则安装微型计算机22。本实施例中,在“匚”型支架20的上端左侧通过一结构形式相同的“匚”型小支架21于顶部安装微型计算机22,在“匚”型小支架21与“匚”型支架20顶端之间的区域放置一个小电池18。
50.工作原理:
51.本实施例的移动操作装置,为移动底盘组件的移动底盘1底部配置四轮独立伺服驱动结构与双横臂独立悬架结构,使结构紧凑,且具有能够轻松胜任多种复杂环境的特点,采用独立的悬挂可以适应各种崎岖路径,适用于在电站巡检环境中使用。
52.由gps天线3接收卫星信号,定位移动操作装置当前所在位置,并将位置信号反馈至微型计算机22;
53.通过激光雷达7与陀螺仪6测量巡检目标所在位置相对移动操作装置所在位置的角度信息与距离信息,并将相对位置信号反馈至微型计算机22;
54.由微型计算机22依据接收到的移动操作装置位置信息与巡检目标的相对位置信息,通过北斗星天线8为移动操作装置朝向指定位置的运行制定导航路径,并通过移动底盘1控制系统控制四轮独立伺服驱动结构驱动移动操作装置按照导航路径运行;
55.运行至到达指定位置后,通过超声局放检测仪19检测巡检目标,通过机械臂控制系统控制六轴机械臂15对巡检目标执行开关电站按钮动作,由相机12获取移动操作装置正前方巡检目标的图像信息,可直观记录各仪器仪表的读数,微型计算机22通过数据发送模块将超声局放检测仪19的检测信息、相机12获取的图像信息传输至远程控制电脑,以记录并保存当前巡检目标的实时工作状态与数据,便于远程控制电脑端的工作人员实时监控;
56.当前巡检目标检测作业完成后,由工作人员通过远程控制电脑向微型计算机22发送下一步检测指令,重复上述步骤,直至结束巡检作业。
57.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1