一种多功能物流机器人
:
1.本实用新型涉及物流机器人技术领域,尤其涉及一种多功能物流机器人。
背景技术:
2.物流是指为了满足客户的需求,通过运输、保管、配送等方式实现原材料、半成品、成品或相关信息进行由商品的产地到商品的消费地的计划、实施和管理的全过程。
3.目前,在物流中对物件的分拣与搬运大部分还是依赖人工,这种依赖人工的方式不仅分拣、搬运效率较低,而且分拣、搬运过程中容易出现错误,不能很好地应用于物流中。
技术实现要素:
4.本实用新型的目的就是针对现有技术存在的不足而提供一种多功能物流机器人,能够替代人工对物件进行分拣、搬运,不仅能够提高分拣、搬运的效率,而且能够避免分拣、搬运出现错误,能够很好地适用于物流中。
5.为了实现上述目的,本实用新型采用的技术方案是:一种多功能物流机器人,包括底座、设置于底座底部的若干个车轮、用于为车轮提供动力的移动动力机构、具有多自由度的夹取机械手、控制模块、用于扫描识别物件信息的扫描模块、巡线模块,所述移动动力机构设置于底座的底部,移动动力机构的输出端驱动连接车轮,移动动力机构、扫描模块、巡线模块分别与控制模块电连接。
6.对上述方案的进一步改进为,所述夹取机械手包括沿z轴方向转动连接于底座上的旋转台、用于驱动旋转台转动的旋转动力机构、沿x轴方向铰接于旋转台上的第一铰接架、用于驱动第一铰接架旋转的第一铰接动力机构、沿x轴方向铰接于第一铰接架上的第二铰接架、用于驱动第二铰接架旋转的第二铰接动力机构、设置于第二铰接架上的夹取模组,旋转动力机构设置于底座上,旋转动力机构的输出端驱动连接旋转台,第一铰接动力机构设置于旋转台上,第一铰接动力机构的输出端驱动连接第一铰接架的底端,第一铰接架的顶端与第二铰接架的后端铰接,第二铰接动力机构设置于第一铰接架的顶端上,第二铰接动力机构的输出端驱动连接第二铰接架的后端,夹取模组设置于第二铰接架的前端上,旋转动力机构、第一铰接动力机构、第二铰接动力机构分别与控制模块电连接。
7.对上述方案的进一步改进为,所述夹取模组包括第一夹爪、第二夹爪、夹取动力机构,第一夹爪、第二夹爪分别沿z轴方向铰接于第二铰接架的前端,夹取动力机构设置于第二铰接架的前端上,夹取动力机构的输出端驱动连接第一夹爪,第一夹爪、第二夹爪分别成型有齿轮部,第一夹爪、第二夹爪对称设置于第二铰接架的前端上,第一夹爪的齿轮部与第二夹爪的齿轮部啮合连接,夹取动力机构与控制模块电连接。
8.对上述方案的进一步改进为,所述巡线模块包括第一巡线模组、第二巡线模组,第一巡线模组包括第一灰度传感器、第二灰度传感器、第三灰度传感器,第一灰度传感器设置于底座底部的一侧的正中间位置处,第二灰度传感器、第三灰度传感器分别设置于底座底部中间位置处,第二灰度传感器、第三灰度传感器分别对称设置于底座在x轴方向上的中轴
线的前后两端,第二巡线模组包括第四灰度传感器、第五灰度传感器、第六灰度传感器,第四灰度传感器设置于底座底部的一端的正中间位置处,第五灰度传感器、第六灰度传感器分别对称设置于底座在y轴方向上的中轴线的两侧,第一灰度传感器、第二灰度传感器、第三灰度传感器、第四灰度传感器、第五灰度传感器、第六灰度传感器分别与控制模块电连接。
9.对上述方案的进一步改进为,所述第一灰度传感器、第二灰度传感器、第三灰度传感器、第四灰度传感器、第五灰度传感器、第六灰度传感器分别罩设有遮光罩。
10.对上述方案的进一步改进为,所述车轮有四个,四个车轮分别设置于底座底部的四角,四个车轮均为麦克纳姆轮。
11.对上述方案的进一步改进为,所述移动动力机构包括与车轮数量相同、位置相对应的步进电机,各个步进电机分别设置于底座底部,各个步进电机的输出端分别驱动连接所对应的车轮。
12.本实用新型有益效果在于:本实用新型提供的一种多功能物流机器人,包括底座、设置于底座底部的若干个车轮、用于为车轮提供动力的移动动力机构、具有多自由度的夹取机械手、控制模块、用于扫描识别物件信息的扫描模块、巡线模块,所述移动动力机构设置于底座的底部,移动动力机构的输出端驱动连接车轮,移动动力机构、扫描模块、巡线模块分别与控制模块电连接;
13.本实用新型通过具有多自由度的夹取机械手能够对底座四周的物件进行夹取、放置,通过扫描模块能够对各个物件进行信息识别,通过巡线模块、车轮、移动动力机构的结合能够快速移动至各个位置处,本实用新型通过移动动力机构、车轮、夹取机械手、扫描模块、巡线模块的结合能够对各个位置处的物件进行信息识别并夹取,然后再将各个物件运载至所需位置处放置,本实用新型能够替代人工对物件进行分拣、搬运,不仅能够提高分拣、搬运的效率,而且能够避免分拣、搬运出现错误,能够很好地适用于物流中。
附图说明:
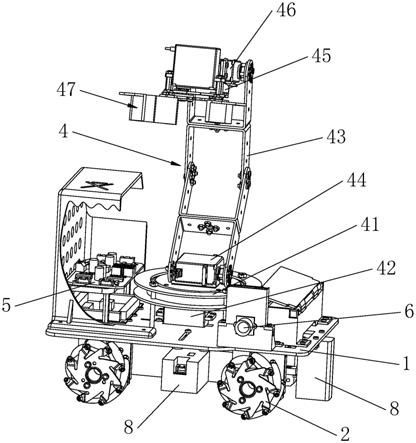
14.图1为本实用新型的结构示意图。
15.图2为本实用新型另一视角的结构示意图。
16.图3为本实用新型夹取模组的结构示意图。
17.图4为本实用新型的控制原理框图。
18.附图标记说明:底座1、车轮2、移动动力机构3、步进电机31、夹取机械手4、旋转台41、旋转动力机构42、第一铰接架43、第一铰接动力机构44、第二铰接架45、第二铰接动力机构46、夹取模组47、第一夹爪471、齿轮部4711、第二夹爪472、夹取动力机构473、控制模块5、扫描模块6、巡线模块7、第一巡线模组71、第一灰度传感器711、第二灰度传感器712、第三灰度传感器713、第二巡线模组72、第四灰度传感器721、第五灰度传感器722、第六灰度传感器723、遮光罩8。
具体实施方式:
19.下面结合附图对本实用新型作进一步的说明,如图1
‑
4所示,本实用新型包括底座1、设置于底座1底部的若干个车轮2、用于为车轮2提供动力的移动动力机构3、具有多自由
度的夹取机械手4、控制模块5、用于扫描识别物件信息的扫描模块6、巡线模块7,所述移动动力机构3设置于底座1的底部,本实施例中的扫描模块6为openmv相机,通过openmv相机能够快速、精确地对各个物件上的二维码信息进行扫描识别,移动动力机构3的输出端驱动连接车轮2,移动动力机构3、扫描模块6、巡线模块7分别与控制模块5电连接;本实用新型通过具有多自由度的夹取机械手4能够对底座1四周的物件进行夹取、放置,通过扫描模块6能够对各个物件进行信息识别,通过巡线模块7、车轮2、移动动力机构3的结合能够快速移动至各个位置处,本实用新型通过移动动力机构3、车轮2、夹取机械手4、扫描模块6、巡线模块7的结合能够对各个位置处的物件进行信息识别并夹取,然后再将各个物件运载至所需位置处放置,本实用新型能够替代人工对物件进行分拣、搬运,不仅能够提高分拣、搬运的效率,而且能够避免分拣、搬运出现错误,能够很好地适用于物流中。
20.夹取机械手4包括沿z轴方向转动连接于底座1上的旋转台41、用于驱动旋转台41转动的旋转动力机构42、沿x轴方向铰接于旋转台41上的第一铰接架43、用于驱动第一铰接架43旋转的第一铰接动力机构44、沿x轴方向铰接于第一铰接架43上的第二铰接架45、用于驱动第二铰接架45旋转的第二铰接动力机构46、设置于第二铰接架45上的夹取模组47,旋转动力机构42设置于底座1上,旋转动力机构42的输出端驱动连接旋转台41,第一铰接动力机构44设置于旋转台41上,第一铰接动力机构44的输出端驱动连接第一铰接架43的底端,第一铰接架43的顶端与第二铰接架45的后端铰接,第二铰接动力机构46设置于第一铰接架43的顶端上,第二铰接动力机构46的输出端驱动连接第二铰接架45的后端,夹取模组47设置于第二铰接架45的前端上,旋转动力机构42、第一铰接动力机构44、第二铰接动力机构46分别与控制模块5电连接,本实用新型的夹取机械手4具有多自由度,能够快速地对底座1四周的物件进行夹取、放置。
21.夹取模组47包括第一夹爪471、第二夹爪472、夹取动力机构473,第一夹爪471、第二夹爪472分别沿z轴方向铰接于第二铰接架45的前端,夹取动力机构473设置于第二铰接架45的前端上,夹取动力机构473的输出端驱动连接第一夹爪471,第一夹爪471、第二夹爪472分别成型有齿轮部4711,第一夹爪471、第二夹爪472对称设置于第二铰接架45的前端上,第一夹爪471的齿轮部4711与第二夹爪472的齿轮部4711啮合连接,夹取动力机构473与控制模块5电连接,本实用新型的夹取模组47能够快速、稳定地对物件进行夹取、放置。
22.巡线模块7包括第一巡线模组71、第二巡线模组72,第一巡线模组71包括第一灰度传感器711、第二灰度传感器712、第三灰度传感器713,第一灰度传感器711设置于底座1底部的一侧的正中间位置处,第二灰度传感器712、第三灰度传感器713分别设置于底座1底部中间位置处,第二灰度传感器712、第三灰度传感器713分别对称设置于底座1在x轴方向上的中轴线的前后两端,第二巡线模组72包括第四灰度传感器721、第五灰度传感器722、第六灰度传感器723,第四灰度传感器721设置于底座1底部的一端的正中间位置处,第五灰度传感器722、第六灰度传感器723分别对称设置于底座1在y轴方向上的中轴线的两侧,第一灰度传感器711、第二灰度传感器712、第三灰度传感器713、第四灰度传感器721、第五灰度传感器722、第六灰度传感器723分别与控制模块5电连接;本实用新型的巡线模块7包括第一巡线模组71及第二巡线模组72,通过第一巡线模组71的第二灰度传感器712、第三灰度传感器713的结合能够实现x轴方向的巡线,在进行x轴方向移动时,通过第一灰度传感器711能够对行进方向进行微调及修正,从而能够保证快速、稳定地在x轴方向上移动,通过第二巡
线模组72的第五灰度传感器722、第六灰度传感器723的结合能够实现y轴方向的巡线,在进行y轴方向移动时,通过第四灰度传感器721能够对行进方向进行微调及修正,从而能够保证快速、稳定地在y轴方向上移动,本实用新型分别通过第一巡线模组71及第二巡线模组72能够快速、稳定地实现x轴方向、y轴方向的巡线移动,无需底座1进行方向掉转,更能快速地实现移动,从而能够进一步提高物件分拣、搬运效率。
23.第一灰度传感器711、第二灰度传感器712、第三灰度传感器713、第四灰度传感器721、第五灰度传感器722、第六灰度传感器723分别罩设有遮光罩8,遮光罩8能够极大地降低外部光线对灰度传感器的影响,能够提高灰度传感器识别精度,从而能够保证巡线模块7精准、稳定地实现巡线。
24.本实施例中的车轮2有四个,当然,在其他实施例中,也可以包括其他数量的车轮2,四个车轮2分别设置于底座1底部的四角,四个车轮2均为麦克纳姆轮,通过麦克纳姆轮能够更好地进行全方位移动。
25.移动动力机构3包括与车轮2数量相同、位置相对应的步进电机31,各个步进电机31分别设置于底座1底部,各个步进电机31的输出端分别驱动连接所对应的车轮2。
26.工作原理:
27.将本实用新型放置于设有黑色路线的仓库地面上,本实用新型通过巡线模块7对地面上的黑色路线进行识别并实现巡线行进,待本实用新型行进至待取物件位置处,扫描模块6对待取物件上的二维码信息进行扫描识别并获取搬运相关信息,夹取机械手4对待取物件进行夹取,本实用新型通过巡线模块7对地面上的黑色路线进行识别并巡线行进至本次夹取物件所需放置位置处,待本实用新型行进至本次夹取物件所需放置位置处时,夹取机械手4将物件进行放置,完成本次物件分拣、搬运的整个过程;本实用新型能够替代人工对物件进行分拣、搬运,不仅能够提高分拣、搬运的效率,而且能够避免分拣、搬运出现错误,能够很好地适用于物流中。
28.当然,以上所述仅是本实用新型的较佳实施方式,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本实用新型专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1