电动作业机的制作方法
电动作业机
1.关联申请的相互参考
2.本国际申请主张2019年5月31日向日本专利局申请的日本专利申请第2019
‑
102667号的优先权,将日本专利申请第2019
‑
102667号的全部内容通过参考而引用到本国际申请中。
技术领域
3.本发明涉及具备无刷马达作为动力源的电动作业机。
背景技术:
4.专利文献1中记载有如下电动作业机,即,对朝向用于驱动马达的逆变电路的供电进行控制的供电开关元件相对于马达驱动器而被串联连接,三相逆变电路与供电开关元件之间的连接点上升至5v。
5.现有技术文献
6.专利文献
7.专利文献1:日本特许第5798134号公报
技术实现要素:
8.专利文献1中记载的电动作业机构成为:通过对使供电开关元件处于断开状态时的上述连接点的电压进行测定,来进行供电开关元件的故障诊断。然而,专利文献1中记载的电动作业机中,无法判断构成逆变电路的开关元件中是否发生短路故障。如果在构成逆变电路的开关元件中发生短路故障的状态下对马达进行驱动,则有可能有电源短路电流进行流通,蓄电池有可能疲劳。
9.本发明在电动作业机中对开关元件的短路故障进行检测。
10.本发明的一个方案是具备无刷马达来作为动力源的电动作业机,其具备:逆变电路、电源侧开关元件、电源侧电阻、至少一个电路侧电阻、以及故障判断部。
11.逆变电路构成为:具有在直流电源与无刷马达之间的多个第一通电路径各自所设置的多个半导体开关元件,借助多个半导体开关元件,对朝向无刷马达的通电进行控制。
12.电源侧开关元件设置于直流电源与逆变电路之间的第二通电路径。
13.电源侧电阻相对于电源侧开关元件进行并联连接。
14.至少一个电路侧电阻构成为:在逆变电路的多个半导体开关元件全部处于断开状态的情况下,以在逆变电路中的直流电源的正极侧与负极侧之间能够导通的状态而与逆变电路连接。
15.故障判断部构成为:使电源侧开关元件和多个半导体开关元件全部处于断开状态,基于电源侧开关元件与逆变电路连接的连接点处的连接点电压,判断多个半导体开关元件及电源侧开关元件中是否有至少一个短路。
16.像这样构成的本发明的电动作业机中,至少一个电路侧电阻以在逆变电路中的直
流电源的正极侧与负极侧之间能够导通的状态而与逆变电路连接。据此,逆变电路中,如果多个半导体开关元件中的至少一个短路,则连接点电压发生变化。另外,电源侧电阻相对于电源侧开关元件进行并联连接。因此,如果电源侧开关元件短路,则连接点电压发生变化。并且,多个半导体开关元件中的至少一个发生了短路的情形和电源侧开关元件发生了短路的情形下,连接点电压不同。
17.因此,本发明的电动作业机能够检测出:多个半导体开关元件中是否有至少一个短路、以及电源侧开关元件是否短路。
18.本发明的一个方案中,具体而言,至少一个电路侧电阻可以相对于高边开关元件中的至少一个进行并联连接,且相对于低边开关元件中的至少一个进行并联连接。高边开关元件为:多个半导体开关元件中的、在无刷马达与直流电源的正极之间的第一通电路径所设置的半导体开关元件。低边开关元件为:在无刷马达与直流电源的负极之间的第一通电路径所设置的半导体开关元件。
19.本发明的一个方案中,可以在连接点电压为:以表示多个半导体开关元件中的1个半导体开关元件发生短路故障时的连接点电压的方式而被预先设定的故障判断电压以下的情况下,故障判断部判断为多个半导体开关元件中的至少一个短路。据此,本发明的电动作业机能够以将连接点电压和故障判断电压进行比较的简便方法,来判断多个半导体开关元件中是否有至少一个短路。
20.本发明的一个方案中,可以在连接点电压为:以表示电源侧开关元件发生短路故障时的连接点电压的方式而被预先设定的电源侧故障判断电压以上的情况下,故障判断部判断为电源侧开关元件短路。据此,本发明的电动作业机能够以将连接点电压和电源侧故障判断电压进行比较的简便方法来判断电源侧开关元件是否短路。
21.本发明的一个方案中,可以具备:短路通知部和电源切断部。短路通知部构成为:在故障判断部判断为多个半导体开关元件及电源侧开关元件中的至少一个短路的情况下,对该情况进行通知。电源切断部构成为:在故障判断部判断为多个半导体开关元件及电源侧开关元件中的至少一个短路的情况下,当为了使电动作业机工作而被操作的工作开关处于接通状态时,使多个半导体开关元件的全部和电源侧开关元件处于断开状态。据此,本发明的电动作业机在多个半导体开关元件及电源侧开关元件中的至少一个短路的情况下,能够使电动作业机的使用者认识到该情况。此外,本发明的电动作业机在多个半导体开关元件及电源侧开关元件中的至少一个短路的情况下,能够抑制:短路电流在直流电源的正极与负极之间流通的事态的发生。
22.本发明的一个方案中,可以具备:并联开关元件和判断时控制部。并联开关元件相对于电源侧电阻进行串联连接,且相对于电源侧开关元件进行并联连接。判断时控制部构成为:在故障判断部开始故障判断时,使并联开关元件处于接通状态。据此,本发明的电动作业机在故障判断部执行故障判断时以外,能够使电流不流通于电源侧电阻,从而能够降低本发明的电动作业机的耗电。
23.本发明的一个方案中,电源侧电阻和至少一个电路侧电阻的电阻值可以彼此相等。据此,本发明的电动作业机能够容易地计算出:多个半导体开关元件及电源侧开关元件中的至少一个短路时的连接点电压。
24.本发明的一个方案中,可以具备禁止部,该禁止部构成为:在无刷马达旋转时,禁
止故障判断部执行故障判断。据此,本发明的电动作业机能够抑制:在随着无刷马达的旋转而产生的感应电压对连接点电压造成影响时故障判断部执行故障判断的事态的发生,从而能够使故障判断部的故障判断精度得到提高。
25.本发明的一个方案中,故障判断电压可以在正常最低值与多个半导体开关元件之一短路时的连接点电压的值之间进行设定,其中,该正常最低值为多个半导体开关元件的全部和电源侧开关元件均正常时的连接点电压的最低值。据此,本发明的电动作业机能够抑制:尽管多个半导体开关元件均未短路、但判断为多个半导体开关元件中的至少一个短路的事态的发生,从而能够使故障判断部的故障判断精度得到提高。
26.本发明的一个方案中,正常最低值可以为:负极侧要素的温度高于正极侧要素的温度时的值。正极侧要素为:作为构成电动作业机的构成要素的逆变电路及电源侧开关元件中,在从直流电源的正极至直流电源的负极为止的通电路径中,配置成靠近直流电源的正极的构成要素。负极侧要素为:配置成靠近直流电源的负极的构成要素。据此,本发明的电动作业机能够抑制:尽管多个半导体开关元件均未短路、但判断为多个半导体开关元件中的至少一个短路的事态的发生,从而能够使故障判断部的故障判断精度进一步得到提高。
附图说明
27.图1是表示第一实施方式的电动作业机的整体构成的立体图。
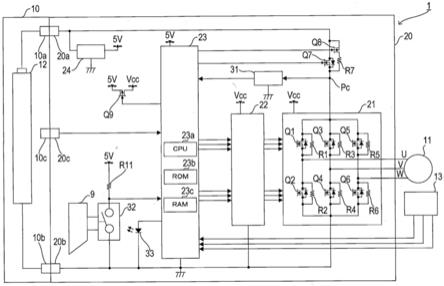
28.图2是表示第一实施方式的电动作业机的电气构成的框图。
29.图3是表示作业机控制处理的流程图。
30.图4是表示第一实施方式的故障诊断处理的流程图。
31.图5是表示防止重启处理的流程图。
32.图6是表示省电模式处理的流程图。
33.图7是表示马达控制处理的流程图。
34.图8是表示第二实施方式的电动作业机的电气构成的立体图。
35.图9是表示第二实施方式的故障诊断处理的流程图。
36.图10是表示第三实施方式的电动作业机的电气构成的立体图。
37.图11是表示第三实施方式的马达驱动器的等效电路的图。
38.图12是表示第三实施方式的故障诊断处理的流程图。
39.图13是表示连接点电压与蓄电池电压之间的关系的曲线图。
40.符号说明
[0041]1…
电动作业机,11
…
马达,12
…
蓄电池,21
…
马达驱动器,23
…
控制电路,pc
…
连接点,q1~q7
…
开关元件,r1~r7、r21
…
电阻。
具体实施方式
[0042]
(第一实施方式)
[0043]
以下,将本发明的第一实施方式与附图一同进行说明。
[0044]
如图1所示,本实施方式的电动作业机1是以被加工部件的切断为主要目的进行使用的圆锯。
[0045]
电动作业机1具备:基座2和主体部3。基座2为在进行被加工部件的切断作业时与作为切断对象的被加工部件的上表面接触的大致矩形的部件。主体部3配置于基座2的上表面侧。
[0046]
主体部3具备:圆形的锯片4、锯片壳体5、以及盖6。锯片4配置于主体部3的切断前进方向上的右侧。锯片壳体5形成为:将锯片4上侧的大致半周范围的周缘收纳于内部并覆盖。
[0047]
盖6形成为:将锯片4下侧的大致半周范围的周缘覆盖。盖6为开闭式,图1示出了盖6关闭的状态。在被加工部件的切断时,通过使电动作业机1在切断前进方向上移动,使得盖6以锯片4的旋转中心为中心沿着图1中的逆时针方向旋转而逐渐打开。据此,锯片4露出,其露出部分切入于被加工部件。
[0048]
在主体部3的左侧设置有大致圆筒状的马达壳体7。在该马达壳体7的内部收纳有作为电动作业机1的驱动源的马达11。应予说明,马达11示于图2而未示于图1。
[0049]
在马达壳体7与锯片4之间收纳有未图示的齿轮机构。当马达11进行旋转时,该旋转经由齿轮机构而向锯片4传递,使得锯片4旋转。
[0050]
在主体部3的上侧配置有由电动作业机1的使用者把持的手柄8。手柄8在主体部3的上侧被安装成拱状。即,手柄8构成为:一端固定于主体部3的切断前进方向上的后端侧,另一端固定于比该后端更靠切断前进方向上的前侧的位置。
[0051]
在手柄8安装有触发开关9。电动作业机1的使用者能够以握着手柄8的状态对触发开关9进行拉动操作及返回操作。应予说明,电动作业机1的使用者能够以对触发开关9附近处朝向手柄8的左右方向突出的锁止杆进行了操作的状态,来拉动触发开关9。具体而言,电动作业机1的使用者从左侧或右侧按压锁止杆,能够拉动触发开关9。以下,将对触发开关9进行了拉动操作的状态称为接通状态,将对触发开关9进行了返回操作的状态称为断开状态。
[0052]
在主体部3的后端,装卸自如地装配有:对能够反复充电的蓄电池12进行了收纳的蓄电池组10。在主体部3装配有蓄电池组10的状态下,若对触发开关9进行拉动操作,则主体部3内的马达11利用蓄电池12的电力而进行旋转。应予说明,蓄电池12示于图2而未示于图1。
[0053]
如图2所示,电动作业机1具备控制单元20。控制单元20具备:电源端子20a、接地端子20b及通信端子20c。当在主体部3装配有蓄电池组10时,电源端子20a、接地端子20b及通信端子20c分别与蓄电池组10的电源端子10a、接地端子10b及通信端子10c连接。
[0054]
蓄电池组10的电源端子10a与蓄电池12的正极连接。蓄电池组10的接地端子10b与蓄电池12的负极连接。蓄电池组10从通信端子10c输出放电容许信号或者放电禁止信号。
[0055]
控制单元20从蓄电池组10内的蓄电池12接受供电而对马达11进行驱动控制。本实施方式中,马达11为3相无刷马达。
[0056]
控制单元20具备:马达驱动器21、门极驱动器22、控制电路23及调节器24。
[0057]
马达驱动器21为:从蓄电池12接受供电,使电流流通于马达11的各相绕组的电路。本实施方式中,马达驱动器21构成为:具备6个开关元件q1、q2、q3、q4、q5、q6的3相全桥电路。本实施方式中,开关元件q1~q6为mosfet。
[0058]
马达驱动器21中,开关元件q1、q3、q5分别配置于:将马达11的各端子u、v、w和蓄电
池12的正极之间连接的电源线。开关元件q2、q4、q6分别配置于:将马达11的各端子u、v、w和蓄电池12的负极之间连接的地线。
[0059]
马达驱动器21具备:电阻r1、r2、r3、r4、r5、r6。电阻r1、r2、r3、r4、r5、r6分别相对于开关元件q1、q2、q3、q4、q5、q6进行并联连接。应予说明,电阻r1、r2、r3、r4、r5、r6的电阻值彼此相等。
[0060]
门极驱动器22是:按照从控制电路23输出的控制信号,使马达驱动器21内的各开关元件q1~q6处于接通状态或者断开状态,由此使电流流通于马达11的各相绕组,使得马达11进行旋转的电路。
[0061]
控制电路23是以具备cpu23a、rom23b及ram23c等的微型计算机为中心而构成的。微型计算机的各种功能通过cpu23a执行非过渡性实体记录介质中所存储的程序来实现。该例中,rom23b属于存储有程序的非过渡性实体记录介质。另外,通过执行该程序,来执行与程序相对应的方法。应予说明,可以利用一个或者多个ic等从硬件方面构成cpu23a执行的功能的一部分或全部。另外,构成控制电路23的微型计算机的数量可以为1个,也可以为多个。
[0062]
调节器24经由电源端子20a而从蓄电池12接受供电,生成用于使控制电路23动作的5v电压。
[0063]
控制单元20具备:开关元件q7、q8、q9、电阻r7、以及分压电路31。本实施方式中,开关元件q7~q9为mosfet。
[0064]
开关元件q7构成为:漏极与电源端子20a连接,源极与马达驱动器21连接,门极与控制电路23连接。开关元件q8相对于开关元件q7进行并联连接。电阻r7构成为:一端与开关元件q8的漏极连接,另一端与开关元件q7的源极连接。应予说明,电阻r7的电阻值与电阻r1~r6的电阻值相等。
[0065]
分压电路31将对开关元件q7与马达驱动器21连接的连接点pc处的连接点电压进行分压而得到的分压电压向控制电路23输出。
[0066]
在开关元件q9的源极被外加来自调节器24的5v电压,开关元件q9的漏极与马达驱动器21及门极驱动器22连接。开关元件q9的门极与控制电路23连接,开关元件q9根据来自控制电路23的控制信号的电压电平而成为接通状态及断开状态中的任一状态。开关元件q9处于接通状态时,来自调节器24的5v电压作为电源电压vcc而向马达驱动器21及门极驱动器22供给。开关元件q9处于断开状态时,电源电压vcc向马达驱动器21及门极驱动器22的供给被切断。
[0067]
控制单元20具备:开关32和发光二极管33。在开关32的一端,经由电阻r11而被外加来自调节器24的5v电压,开关32的另一端接地。当电动作业机1的使用者对触发开关9进行拉动操作时,开关32成为接通状态;当电动作业机1的使用者对触发开关9进行返回操作时,开关32成为断开状态。并且,开关32的一端与控制电路23连接,利用控制电路23对开关32的一端处的电压进行检测。
[0068]
另外,发光二极管33构成为:阳极与控制电路23连接,阴极接地。当从控制电路23输出出错显示信号时,发光二极管33发光。
[0069]
另外,电动作业机1具备旋转传感器13。旋转传感器13对马达11的旋转位置及转速进行检测,将表示检测结果的检测信号向控制电路23输出。
[0070]
接下来,对控制电路23的cpu23a执行的作业机控制处理的步骤进行说明。作业机控制处理是:向控制电路23供给5v电压而使控制电路23启动后开始的处理。
[0071]
当执行作业机控制处理时,如图3所示,cpu23a首先在s10中执行初始设定。具体而言,cpu23a将作业机控制处理中采用的各种参数设定为初始值,或者将开关元件q9从断开状态切换为接通状态。
[0072]
进而,cpu23a在s20中执行后述的故障诊断处理。然后,cpu23a在s30中判断ram23c中所设置的故障标志f1是否被设定。在以下说明中,应予说明,将标志进行设定是指:使该标志的值为1;将标志进行清除是指:使该标志的值为0。
[0073]
此处,故障标志f1未被设定的情况下,cpu23a在s40中执行后述的防止重启处理。然后,cpu23a在s50中执行后述的省电模式处理。进而,cpu23a在s60中执行后述的马达控制处理,使处理进入s50。
[0074]
另外,在s30中,故障标志f1被设定的情况下,cpu23a在s70中向发光二极管33输出出错显示信号,由此使发光二极管33发光。据此,电动作业机1显示电动作业机1中发生了故障。进而,cpu23a在s80中使开关元件q1~q7处于断开状态,结束作业机控制处理。
[0075]
接下来,对s20中cpu23a执行的故障诊断处理的步骤进行说明。
[0076]
当执行故障诊断处理时,如图4所示,cpu23a首先在s110中使开关元件q1~q7处于断开状态。
[0077]
然后,cpu23a在s120中基于来自旋转传感器13的检测信号来判断马达11是否进行惯性旋转。此处,马达11进行惯性旋转的情况下,cpu23a结束故障诊断处理。另一方面,马达11未进行惯性旋转的情况下,cpu23a在s130中使开关元件q8处于接通状态。
[0078]
然后,cpu23a在s140中基于来自分压电路31的分压电压来测定连接点电压,将所测定的电压值存储为ram23c中所设置的连接点电压vc。
[0079]
进而,cpu23a在s150中将存储为连接点电压vc的值存储为ram23c中所设置的连接点电压vc1。
[0080]
然后,cpu23a在s160中判断连接点电压vc是否大于0v。应予说明,当马达驱动器21中发生桥臂短路故障时,连接点电压vc成为0v。另一方面,马达驱动器21中未发生桥臂短路故障、且使开关元件q1~q6处于断开状态的情况下,即便使开关元件q7处于接通状态,连接点电压vc也不会成为0v。
[0081]
此处,连接点电压vc为0v以下的情况下,cpu23a使处理进入s220。另一方面,连接点电压vc大于0v的情况下,cpu23a在s170中使开关元件q7处于接通状态。然后,cpu23a在s180中基于来自分压电路31的分压电压,来测定连接点电压,将所测定的电压值存储为连接点电压vc。
[0082]
进而,cpu23a在s190中将存储为连接点电压vc的值存储为ram23c中所设置的蓄电池电压vb。然后,cpu23a在s200中使开关元件q7处于断开状态。
[0083]
然后,cpu23a在s210中判断存储为连接点电压vc1的值是否大于存储为蓄电池电压vb的值的三分之一、且小于存储为蓄电池电压vb的值。即,cpu23a判断(1/3)
×
vb<vc1<vb是否成立。
[0084]
应予说明,开关元件q1~q7处于断开状态时的开关元件q1~q7的漏极
‑
源极间电阻与电阻r1~r7相比,足够大,可以忽略,此时,开关元件q1~q7中未发生短路时的连接点
电压计算为(2/5)
×
vb。另外,开关元件q1~q6中的任一者中发生短路时的连接点电压计算为(1/3)
×
vb。另外,开关元件q7中发生短路时的连接点电压计算为vb。因此,连接点电压与vb相同或者为(1/3)
×
vb以下的情况下,可以判断为开关元件q1~q7中的至少一个中发生短路。
[0085]
此处,存储为连接点电压vc1的值为:存储为蓄电池电压vb的值的三分之一以下,或者为:存储为蓄电池电压vb的值以上的情况下,cpu23a使处理进入s220。
[0086]
然后,当进入s220后,cpu23a将故障标志f1设定,使处理进入s230。
[0087]
另外,在s210中,存储为连接点电压vc1的值大于存储为蓄电池电压vb的值的三分之一、且小于存储为蓄电池电压vb的值的情况下,cpu23a使处理进入s230。
[0088]
然后,当进入s230后,cpu23a使开关元件q8处于断开状态,结束故障诊断处理。
[0089]
接下来,对s40中cpu23a执行的防止重启处理的步骤进行说明。
[0090]
当执行防止重启处理时,如图5所示,cpu23a首先在s310中使开关元件q1~q7处于断开状态。
[0091]
然后,cpu23a在s320中判断触发开关9是否处于断开状态。此处,触发开关9处于接通状态的情况下,cpu23a反复s320的处理,进行待机直至触发开关9成为断开状态。
[0092]
然后,当触发开关9成为断开状态后,cpu23a结束防止重启处理。
[0093]
接下来,对s50中cpu23a执行的省电模式处理的步骤进行说明。
[0094]
当执行省电模式处理时,如图6所示,cpu23a首先在s410中判断触发开关9的断开状态是否持续了预先设定的模式判断时间。此处,触发开关9的断开状态未持续模式判断时间的情况下,cpu23a结束省电模式处理。
[0095]
另一方面,触发开关9的断开状态持续了模式判断时间的情况下,cpu23a在s420中进入睡眠模式。当进入睡眠模式后,cpu23a使开关元件q9处于断开状态。据此,电源电压vcc向马达驱动器21及门极驱动器22的供给被切断。
[0096]
然后,cpu23a在s430中判断触发开关9是否处于接通状态。此处,触发开关9处于断开状态的情况下,cpu23a反复s430的处理,进行待机直至触发开关9成为接通状态。
[0097]
然后,当触发开关9成为接通状态后,cpu23a在s440中唤醒,进入通常动作模式。结束省电模式处理。当进入通常动作模式后,cpu23a使开关元件q9处于接通状态。据此,电源电压vcc向马达驱动器21及门极驱动器22的供给再次开启。
[0098]
接下来,对s60中cpu23a执行的马达控制处理的步骤进行说明。
[0099]
当执行马达控制处理时,如图7所示,cpu23a首先在s510中判断触发开关9是否处于接通状态。此处,触发开关9处于断开状态的情况下,cpu23a使处理进入s540。另一方面,触发开关9处于接通状态的情况下,cpu23a在s520中判断蓄电池12是否处于放电容许状态。具体而言,cpu23a在检测到来自蓄电池组10的放电容许信号的情况下,判断为蓄电池12处于放电容许状态。
[0100]
此处,蓄电池12处于放电容许状态的情况下,cpu23a在s530中执行用于驱动马达11的马达驱动处理,使处理进入s510。另一方面,蓄电池12没有处于放电容许状态的情况下,cpu23a使处理进入s540。
[0101]
然后,当进入s540后,cpu23a执行用于将马达11的驱动停止的马达停止处理,结束马达控制处理。
[0102]
像这样构成的电动作业机1具备马达11作为动力源,且具备:马达驱动器21、开关元件q7、电阻r7、电阻r1、r2、r3、r4、r5、r6、以及控制电路23。马达11为无刷马达。
[0103]
马达驱动器21具备:在蓄电池12与马达11之间的6个第一通电路径的每一个路径上设置的6个开关元件q1、q2、q3、q4、q5、q6,借助开关元件q1~q6而对朝向马达11的通电进行控制。
[0104]
设置有开关元件q1的第一通电路径为:蓄电池12的正极与马达11的端子u之间的通电路径。设置有开关元件q3的第一通电路径为:蓄电池12的正极与马达11的端子v之间的通电路径。设置有开关元件q5的第一通电路径为:蓄电池12的正极与马达11的端子w之间的通电路径。设置有开关元件q2的第一通电路径为:蓄电池12的负极与马达11的端子u之间的通电路径。设置有开关元件q4的第一通电路径为:蓄电池12的负极与马达11的端子v之间的通电路径。设置有开关元件q6的第一通电路径为:蓄电池12的负极与马达11的端子w之间的通电路径。
[0105]
开关元件q7设置于:蓄电池12与马达驱动器21之间的第二通电路径。电阻r7相对于开关元件q7进行并联连接。
[0106]
电阻r1、r2、r3、r4、r5、r6构成为:在马达驱动器21的开关元件q1~q6全部处于断开状态的情况下,以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。
[0107]
控制电路23构成为:使开关元件q7和开关元件q1~q6的全部处于断开状态,基于开关元件q7与马达驱动器21连接的连接点pc处的连接点电压,判断开关元件q1~q6及开关元件q7中是否有至少一个短路。
[0108]
具体而言,电阻r1、r3、r5分别与开关元件q1、q3、q5进行并联连接,电阻r2、r4、r6分别与开关元件q2、q4、q6进行并联连接。开关元件q1~q6中,开关元件q1、q3、q5设置于马达11与蓄电池12的正极之间的第一通电路径。开关元件q1~q6中,开关元件q2、q4、q6设置于马达11与蓄电池12的负极之间的第一通电路径。
[0109]
像这样的电动作业机1中,电阻r1~r6以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。据此,马达驱动器21中,如果开关元件q1~q6中的至少一个短路,则连接点电压发生变化。另外,电阻r7与开关元件q7进行并联连接。因此,如果开关元件q7短路,则连接点电压发生变化。并且,开关元件q1~q6中的至少一个发生了短路的情形和开关元件q7发生了短路的情形下,连接点电压不同。
[0110]
因此,电动作业机1能够检测出:开关元件q1~q6中是否有至少一个短路、以及开关元件q7是否短路。
[0111]
在连接点电压为:以表示开关元件q1~q6中的1个开关元件发生短路故障时的连接点电压的方式而被预先设定的故障判断电压(本实施方式中为(1/3)
×
vb)以下的情况下,控制电路23判断为开关元件q1~q6中的至少一个短路。据此,电动作业机1能够以将连接点电压和故障判断电压进行比较的简便方法,来判断开关元件q1~q6中是否有至少一个短路。
[0112]
在连接点电压为:以表示开关元件q7发生短路故障时的连接点电压的方式而被预先设定的电源侧故障判断电压(本实施方式中为vb)以上的情况下,控制电路23判断为开关元件q7短路。据此,电动作业机1能够以将连接点电压和电源侧故障判断电压进行比较的简
便方法,来判断开关元件q7是否短路。
[0113]
电动作业机1的发光二极管33构成为:在控制电路23判断为开关元件q1~q6及开关元件q7中的至少一个短路的情况下,对该情况进行通知。控制电路23在判断为开关元件q1~q6及开关元件q7中的至少一个短路的情况下,当为了使电动作业机1进行工作而被操作的触发开关9处于接通状态时,使开关元件q1~q6的全部和开关元件q7处于断开状态。据此,电动作业机1在开关元件q1~q6及开关元件q7中的至少一个短路的情况下,能够使电动作业机1的使用者认识到该情况。此外,电动作业机1在开关元件q1~q6及开关元件q7中的至少一个短路的情况下,能够抑制:短路电流在蓄电池12的正极与负极之间流通的事态的发生。
[0114]
开关元件q8与电阻r7进行串联连接,且与开关元件q7进行并联连接。控制电路23构成为:在控制电路23开始故障判断时,使开关元件q8处于接通状态。据此,电动作业机1在控制电路23执行故障判断时以外,能够使电流不流通于电阻r7,从而能够降低电动作业机1的耗电。
[0115]
另外,电阻r7和电阻r1~r6的电阻值彼此相等。据此,电动作业机1能够容易地计算出:开关元件q1~q6及开关元件q7中的至少一个短路时的连接点电压。
[0116]
控制电路23构成为:在马达11旋转时,禁止控制电路23执行故障判断。据此,电动作业机1能够抑制:在随着马达11的惯性旋转而产生的感应电压对连接点电压造成影响时控制电路23执行故障判断的事态的发生,从而能够使控制电路23的故障判断精度得到提高。
[0117]
以上说明的实施方式中,马达11相当于无刷马达,马达驱动器21相当于逆变电路,开关元件q1~q6相当于多个半导体开关元件,开关元件q7相当于电源侧开关元件。
[0118]
另外,蓄电池12相当于直流电源,电阻r7相当于电源侧电阻,电阻r1~r6相当于至少一个电路侧电阻,s110~s230相当于作为故障判断部的处理。
[0119]
另外,开关元件q1、q3、q5相当于高边开关元件,开关元件q2、q4、q6相当于低边开关元件,发光二极管33相当于短路通知部,s80相当于作为电源切断部的处理。
[0120]
另外,开关元件q8相当于并联开关元件,s130相当于作为判断时控制部的处理,s120相当于作为禁止部的处理。
[0121]
(第二实施方式)
[0122]
以下,将本发明的第二实施方式与附图一同进行说明。应予说明,第二实施方式中,对与第一实施方式不同的部分进行说明。对通用的构成标记相同的符号。
[0123]
第二实施方式的电动作业机1与第一实施方式的不同点在于:对电动作业机1的电气构成进行了变更、以及对故障诊断处理进行了变更。
[0124]
第二实施方式的电动作业机1与第一实施方式的不同点在于:如图8所示,省略了电阻r1、r2、r3、r4、r5、r6,并追加了电阻r21。
[0125]
电阻r21与马达驱动器21进行并联连接。具体而言,电阻r21的一端与连接点pc连接,电阻r21的另一端接地。
[0126]
此处,对第二实施方式中的检测开关元件q1~q7的短路故障的方法进行说明。
[0127]
首先,开关元件q1~q7处于断开状态时的开关元件q1~q7的漏极
‑
源极间电阻与电阻r7及电阻r21相比,足够大,可以忽略。
[0128]
另外,马达11的绕组电阻与电阻r7及电阻r21相比,足够小,可以忽略。这种情况下,马达驱动器21中,如虚线l1及点p1、p2、p3所示,等效地看作:以开关元件q1、q3、q5的源极和开关元件q2、q4、q6的漏极连接的方式进行连结。
[0129]
此外,电阻r7和电阻r21设为相同的电阻值。这样的条件下,开关元件q1~q7处于断开状态时的连接点电压(以下为断开时连接点电压)在开关元件q1~q7中未发生短路的情况下,计算为(1/2)
×
vb。
[0130]
另外,开关元件q7中发生短路时的断开时连接点电压计算为vb。
[0131]
另外,开关元件q1、q3、q5中的至少一个中发生短路、且使开关元件q2、q4、q6中的至少一个处于接通状态时的连接点电压计算为0v。
[0132]
另外,开关元件q2、q4、q6中的至少一个中发生短路、且使开关元件q1、q3、q5中的至少一个处于接通状态时的连接点电压计算为0v。
[0133]
因此,连接点电压与vb或者0v相同的情况下,可以判断为开关元件q1~q7中的至少一个中发生短路。
[0134]
接下来,对第二实施方式的故障诊断处理的步骤进行说明。
[0135]
第二实施方式的故障诊断处理与第一实施方式的不同特点在于:如图9所示,省略了s210,并追加了s610~s690。
[0136]
即,当s200的处理结束后,cpu23a在s610中判断:存储为连接点电压vc1的值是否小于存储为蓄电池电压vb的值。此处,存储为连接点电压vc1的值为:存储为蓄电池电压vb的值以上的情况下,cpu23a使处理进入s220。
[0137]
另一方面,存储为连接点电压vc1的值小于存储为蓄电池电压vb的值的情况下,cpu23a在s620中使开关元件q2、q4、q6处于接通状态。然后,cpu23a在s630中基于来自分压电路31的分压电压,来测定连接点电压,并将所测定的电压值存储为连接点电压vc。此外,cpu23a在s640中使开关元件q2、q4、q6处于断开状态。
[0138]
然后,cpu23a在s650中判断连接点电压vc是否大于0v。此处,连接点电压vc为0v以下的情况下,cpu23a使处理进入s220。另一方面,连接点电压vc大于0v的情况下,cpu23a在s660中使开关元件q1、q3、q5处于接通状态。然后,cpu23a在s670中基于来自分压电路31的分压电压,来测定连接点电压,并将所测定的电压值存储为连接点电压vc。此外,cpu23a在s680中使开关元件q1、q3、q5处于断开状态。
[0139]
然后,cpu23a在s690中判断连接点电压vc是否大于0v。此处,连接点电压vc为0v以下的情况下,cpu23a使处理进入s220。另一方面,连接点电压vc大于0v的情况下,cpu23a使处理进入s230。
[0140]
像这样构成的电动作业机1具备马达11作为动力源,且具备:马达驱动器21、开关元件q7、电阻r7、电阻r21、以及控制电路23。
[0141]
电阻r21构成为:在马达驱动器21的开关元件q1~q6全部处于断开状态的情况下,以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。具体而言,电阻r21与马达驱动器21进行并联连接。
[0142]
控制电路23构成为:使开关元件q7和开关元件q1~q6的全部处于断开状态,基于开关元件q7与马达驱动器21连接的连接点pc处的连接点电压,判断开关元件q1~q6及开关元件q7中是否有至少一个短路。
[0143]
像这样的电动作业机1中,电阻r21以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。据此,马达驱动器21中,如果开关元件q1~q6中的至少一个短路,则连接点电压发生变化。另外,电阻r7与开关元件q7进行并联连接。因此,如果开关元件q7短路,则连接点电压发生变化。并且,开关元件q1~q6中的至少一个发生了短路的情形和开关元件q7发生了短路的情形下,连接点电压不同。
[0144]
因此,电动作业机1能够检测出:开关元件q1~q6中是否有至少一个短路、以及开关元件q7是否短路。
[0145]
以上说明的实施方式中,电阻r21相当于至少一个电路侧电阻,s110~s200、s220、s230、s610~s690相当于作为故障判断部的处理。
[0146]
(第三实施方式)
[0147]
以下,将本发明的第三实施方式与附图一同进行说明。应予说明,第三实施方式中,对与第一实施方式不同的部分进行说明。对通用的构成标记相同的符号。
[0148]
第三实施方式的电动作业机1与第一实施方式的不同点在于:对电动作业机1的电气构成进行了变更、以及对故障诊断处理进行了变更。
[0149]
第三实施方式的电动作业机1与第一实施方式的不同点在于:如图10所示,省略了电阻r3、r4、r5、r6。
[0150]
此处,对第三实施方式中的检测开关元件q1~q7的短路故障的方法进行说明。
[0151]
首先,开关元件q1~q7处于断开状态时的开关元件q1~q7的漏极
‑
源极间电阻与电阻r1、r2、r7相比,足够大,可以忽略。
[0152]
另外,马达11的绕组电阻与电阻r1、r2、r7相比,足够小,可以忽略。这种情况下,如图8所示,马达驱动器21中,如虚线l1及点p1、p2、p3所示,等效地看作:以开关元件q1、q3、q5的源极和开关元件q2、q4、q6的漏极连接的方式进行连结。
[0153]
此外,如上所述,开关元件q1~q7处于断开状态时的开关元件q1~q7的漏极
‑
源极间电阻与电阻r1、r2、r7相比,足够大。因此,如图11所示,马达驱动器21等效地看作如下电路,即,开关元件q1、开关元件q3及开关元件q5进行并联连接,开关元件q2、开关元件q4及开关元件q6进行并联连接,并联连接的开关元件q1、q3、q5、和开关元件q2、q4、q6进行串联连接,并联连接的开关元件q1、q3、q5再与电阻r1进行并联连接,并联连接的开关元件q2、q4、q6再与电阻r2进行并联连接。
[0154]
此外,电阻r7和电阻r1、r2设为相同的电阻值。这样的条件下,开关元件q1~q7处于断开状态时的连接点电压(以下为断开时连接点电压)在开关元件q1~q7中未发生短路的情况下,计算为(2/3)
×
vb。
[0155]
另外,开关元件q7中发生短路时的断开时连接点电压计算为vb。
[0156]
另外,开关元件q1~q6中的任一个开关元件中发生短路时的连接点电压计算为(1/2)
×
vb。
[0157]
因此,连接点电压与vb相同、或者为(1/2)
×
vb以下的情况下,可以判断为开关元件q1~q7中的至少一个发生短路。
[0158]
接下来,对第三实施方式的故障诊断处理的步骤进行说明。
[0159]
第三实施方式的故障诊断处理与第一实施方式的不同特点在于:如图12所示,省略了s210,并追加了s710。
[0160]
即,当s200的处理结束后,cpu23a在s710中判断:存储为连接点电压vc1的值是否大于存储为蓄电池电压vb的值的二分之一、且小于存储为蓄电池电压vb的值。即,cpu23a判断(1/2)
×
vb<vc1<vb是否成立。
[0161]
此处,存储为连接点电压vc1的值为:存储为蓄电池电压vb的值的二分之一以下,或者为:存储为蓄电池电压vb的值以上的情况下,cpu23a使处理进入s220。
[0162]
另一方面,存储为连接点电压vc1的值大于存储为蓄电池电压vb的值的二分之一、且小于存储为蓄电池电压vb的值的情况下,cpu23a使处理进入s230。
[0163]
像这样构成的电动作业机1具备马达11作为动力源,且具备:马达驱动器21、开关元件q7、电阻r7、电阻r1、r2、以及控制电路23。
[0164]
电阻r1、r2构成为:在马达驱动器21的开关元件q1~q6全部处于断开状态的情况下,以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。
[0165]
控制电路23构成为:使开关元件q7、和开关元件q1~q6的全部处于断开状态,基于开关元件q7与马达驱动器21连接的连接点pc处的连接点电压,判断开关元件q1~q6及开关元件q7中是否有至少一个短路。
[0166]
具体而言,电阻r1与开关元件q1进行并联连接,电阻r2与开关元件q2进行并联连接。开关元件q1设置于马达11与蓄电池12的正极之间的第一通电路径。开关元件q2设置于马达11与蓄电池12的负极之间的第一通电路径。
[0167]
像这样的电动作业机1中,电阻r1、r2以在马达驱动器21中的蓄电池12的正极侧与负极侧之间能够导通的状态而与马达驱动器21连接。据此,马达驱动器21中,如果开关元件q1~q6中的至少一个短路,则连接点电压发生变化。另外,电阻r7与开关元件q7进行并联连接。因此,如果开关元件q7短路,则连接点电压发生变化。并且,开关元件q1~q6中的至少一个发生了短路的情形和开关元件q7发生了短路的情形下,连接点电压不同。
[0168]
因此,电动作业机1能够检测出:开关元件q1~q6中是否有至少一个短路、以及开关元件q7是否短路。
[0169]
以上说明的实施方式中,电阻r1、r2相当于至少一个电路侧电阻,s110~s200、s220、s230、s710相当于作为故障判断部的处理。
[0170]
以上,虽然对本发明的一个实施方式进行了说明,但是,本发明不限定于上述实施方式,可以进行各种变形并实施。
[0171]
例如,上述实施方式中给出了:在蓄电池12的正极与马达驱动器21之间的通电路径配置有开关元件q7的方案,不过,也可以为:在蓄电池12的负极与马达驱动器21之间的通电路径配置有开关元件q7。
[0172]
另外,上述第一实施方式中给出了:vc1≤(1/3)
×
vb的情况下判断为开关元件q1~q6中的至少一个发生短路的方案(即、将故障判断电压设为(1/3)
×
vb的方案)。不过,故障判断电压可以设定在正常最低值与开关元件q1~q6之一发生短路时的连接点电压的值之间,其中,该正常最低值为:开关元件q1~q7正常时的连接点电压的最低值。
[0173]
图13是表示开关元件q1~q7正常时的连接点电压、开关元件q1~q6之一发生短路时的连接点电压、开关元件q7发生短路时的连接点电压、以及蓄电池电压之间的关系的曲线图。
[0174]
图13的直线sl1表示开关元件q7发生短路时的连接点电压。图13的直线sl2表示开关元件q1~q6之一发生短路时的连接点电压。图13的直线sl3为开关元件q1~q6处于低温、开关元件q7处于高温且正常时的连接点电压。图13的直线sl4为开关元件q1~q7处于常温且正常时的连接点电压。图13的直线sl5为开关元件q1~q6处于高温、开关元件q7处于低温且正常时的连接点电压。
[0175]
如图13的直线sl3、sl4、sl5所示,开关元件q1~q7正常时的连接点电压根据开关元件q1~q7的温度而发生变化。然后,连接点电压随着开关元件q1~q6的温度降低或者开关元件q7的温度升高而升高。
[0176]
因此,故障判断电压可以设定在:电动作业机1使用时所假定的开关元件q1~q6的最高温度且开关元件q7的最低温度下的连接点电压(以下为正常最低值)、与开关元件q1~q6之一发生短路时的连接点电压的值之间。据此,电动作业机1能够抑制:尽管开关元件q1~q6均未短路、但判断为开关元件q1~q6中的至少一个短路的事态的发生,从而能够使控制电路23的故障判断精度得到提高。
[0177]
应予说明,即便开关元件q1~q7处于断开状态,开关元件q1~q7的漏极
‑
源极间也有微小的漏电流流通,该漏电流随着开关元件q1~q7的温度上升而增大。亦即,开关元件q1~q7处于断开状态时的漏极
‑
源极间电阻随着开关元件q1~q7的温度上升而减少。
[0178]
另外,开关元件q1~q7发生短路的情况下,漏极
‑
源极间电阻未必为0ω,由于具有某种程度的阻抗,所以,优选在正常范围附近设定故障判断电压,以便提高故障诊断精度。
[0179]
此处,需要避免尽管开关元件q1~q7正常、但判断为短路故障的情形,因此,需要计算出包含偏差的正常范围,并在该正常范围外来设定故障判断电压。
[0180]
上述第一实施方式的电路构成中的偏差的最大原因是由开关元件q1~q7的温度引起的。并且,对正常最低值的温度条件进行研究,配置于地面附近的马达驱动器21的温度较高(即、漏极
‑
源极间电阻最低)、且靠近蓄电池12的开关元件q7的温度较低(漏极
‑
源极间电阻最高)时,成为偏差最大的条件,可以将该条件下的连接点电压设为正常最低值。据此,电动作业机1能够抑制:尽管开关元件q1~q6均未短路、但判断为开关元件q1~q6中的至少一个短路的事态的发生,从而能够使控制电路23的故障判断精度进一步得到提高。这种情况下,开关元件q7相当于正极侧要素,马达驱动器21相当于负极侧要素。
[0181]
本发明的技术可以适用于例如电动锤子、电动锤钻、电动钻、电动起子、电动扳手、电动研磨机、电动圆锯、电动往复锯、电动线锯、电动切割机、电动链锯、电动刨、电动打钉机(包括铆接机)、电动绿篱机、电动割草机、电动草坪剪、电动割灌机、电动吸尘器、电动鼓风机、电动喷雾器、电动撒布机、电动集尘机等各种电动作业机。
[0182]
可以将上述实施方式中的1个构成要素所具有的多个功能通过多个构成要素来实现,或者将1个构成要素所具有的1个功能通过多个构成要素来实现。另外,可以将多个构成要素所具有的多个功能通过1个构成要素来实现,或者将通过多个构成要素实现的1个功能通过1个构成要素来实现。另外,可以将上述实施方式的构成的一部分省略。另外,可以将上述实施方式的构成的至少一部分相对于其他上述实施方式的构成进行附加或置换。
[0183]
除了上述的电动作业机1以外,还可以利用使计算机作为控制单元20发挥作用的程序、记录有该程序的半导体存储器等非过渡性实体记录介质、故障诊断方法等各种方案来实现本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1