用于车辆的把手装置的制作方法
1.本发明涉及用于车辆的把手装置。
背景技术:
2.专利文献1公开了一种具有闪光表面规格的把手装置,其在不使用时被容纳在形成在车辆门等中的凹部中,并且在使用时被电动致动器移动到突出位置。
3.专利文献1的把手装置包括:外把手(把手本体),其可绕旋转轴线旋转;把手杆,其可绕预定的旋转轴线旋转并且包括连结孔,在把手本体中形成的连结突部装配到该连结孔中;以及驱动杆,其被电动马达旋转地驱动。
4.当在把手本体不使用而保持在初始部分时驱动电动马达时,驱动杆发生旋转,并且抵接销被推压抵靠设置在该驱动杆上的销以旋转把手杆,从而使得把手本体从初始位置移动到弹出位置。
5.当把手本体从弹出位置进一步旋转时,伴随驱动杆的旋转通过设置在驱动杆中的闩锁机构侧臂部推动压力接收部,从而使得闩锁释放杆旋转,并且连接到闩锁释放杆的闩锁机构被解锁。
6.惯性杆可旋转地连接到支撑箱,所述把手本体附接到该支撑箱。当施加由于碰撞引起的冲击时,惯性杆旋转到限制位置并限制位于初始位置的把手本体的操作,以防止门锁的意外释放操作和伴随的门打开操作。
7.引用列表
8.专利文献
9.专利文献1:jp2015-090028a
10.在专利文献1的把手装置中,闩锁释放杆由把手杆推动以进行操作,并且能独立于把手杆朝闩锁解锁操作方向旋转。因此,在施加由于碰撞引起的冲击的情况下,例如,即使把手杆设置有抵抗碰撞冲击力的移动限制装置,并且因此把手杆不被操作,只有闩锁释放杆可能由于惯性力而旋转以释放门锁,因此防碰撞的可靠性较低。
技术实现要素:
11.技术问题
12.根据本发明的实施例,在用于车辆的把手装置中,能够防止在因碰撞而施加冲击的情况下由于闩锁释放杆独自的独立操作而导致的意外门锁释放操作。
13.根据本发明的实施例,用于车辆的把手装置包括把手本体2、闩锁释放杆3、位于门4中的门闩锁装置、电动致动器1和推动部形成构件5。把手本体2构造成被所述电动致动器1从初始位置驱动到弹出位置,并且被手动地操作到超过所述弹出位置的闩锁操作位置,并且所述把手装置构造成使得所述门闩锁装置4的闩锁通过所述闩锁释放杆3被旋转地驱动到闩锁释放位置而得到释放。所述推动部形成构件5构造成伴随所述把手本体2的操作从初始对应位置移动到闩锁操作对应位置,所述初始对应位置对应于所述把手本体2的初始位
置,并且所述闩锁操作对应位置对应于所述把手本体2的闩锁操作位置。所述推动部形成构件5具有杆推动部6,所述杆推动部构造成在所述闩锁操作对应位置处推动所述闩锁释放杆3并将所述闩锁释放杆3旋转到闩锁释放位置。所述推动部形成构件5具有限制壁7。所述限制壁7防止所述闩锁释放杆3在从所述初始对应位置到与所述把手本体2的弹出位置相对应的弹出对应位置的区域内朝向所述闩锁释放位置旋转。
14.在本发明中,当已经被电动致动器1驱动到弹出位置的把手本体2被进一步操作到闩锁操作位置时,伴随把手本体2的操作而进行操作的推动部形成构件5从与把手本体2的初始位置相对应的初始对应位置,经由与弹出位置相对应的弹出对应位置,移动到闩锁操作对应位置。伴随推动部形成构件5的移动,在推动部形成构件5中形成的杆推动部6推动闩锁释放杆3,以将闩锁释放杆3旋转到闩锁释放位置,从而操作门闩锁装置4。
15.当由于碰撞(如侧方碰撞)而产生的冲击力施加到把手装置时,即使推动部形成构件5设置有用于碰撞冲击时的适当移动限制手段以限制由惯性力引起的操作,也无法防止闩锁释放杆3由于惯性力而朝向闩锁释放位置的方向独立地操作,所述闩锁释放杆3响应于来自杆推动部6的推动操作而进行操作并且不直接连接到推动部形成构件5。
16.在限制壁7设置在推动部形成构件5中以限制闩锁释放杆3的独立操作的本发明中,闩锁释放杆3不会由于推动部形成构件5不进行操作程度的冲击载荷或者冲击载荷所导致的约束而单独操作,因此能够防止门意外打开。
17.只要推动部形成构件5能伴随把手本体2的操作从初始对应位置移动到闩锁操作对应位置,推动部形成构件5可以与把手本体2一体地形成,或者可以形成为连杆构件,其一端可旋转地连接到把手本体2。
18.用于车辆的把手装置可以进一步包括把手基座8、驱动臂9和操作连杆10。所述驱动臂构造成使得所述驱动臂9的一端可以可旋转地连接到所述把手本体2的一端,所述驱动臂9的另一端可以可旋转地连接到所述把手基座8,并且所述驱动臂9可以由所述电动致动器1驱动。所述操作连杆10可以与所述把手本体2、所述驱动臂9和把手基座8一起形成连杆机构。所述操作连杆10的一端可以可旋转地连接到所述把手本体2的另一端,并且所述操作连杆10的另一端可以可旋转地连接到所述把手基座8。所述操作连杆10可以包括所述推动部形成构件5。
19.在这方面,当驱动臂9被电动致动器1(比如马达)旋转地驱动时,把手本体2从初始位置移动到弹出位置,所述把手本体在一端处连接到操作连杆10并在另一端处连接到驱动臂9并且作为整体形成连杆机构。此后,当把手本体2被进一步操作并移动到闩锁操作位置时,设置在操作连杆10中的推动部形成构件5和闩锁释放杆3被驱动以操作门闩锁装置4。
20.连杆机构能通过把手基座8、驱动臂9、操作连杆10和把手本体2作为四关节连杆机构构造而成,在这种情况下,可以通过手动地将已被电动致动器1驱动到弹出位置的把手本体2进一步拉出到闩锁操作位置来执行门闩锁装置4的闩锁释放操作。
21.当四关节连杆机构被构造为平行连杆机构时,把手本体2从初始位置平行地移动,因此提高了可用性。
22.在所述用于车辆的把手装置中,操作连杆10和把手本体2之间的连接部可以具有滑动副。所述把手本体2可以构造成通过所述把手本体2围绕所述把手本体2和所述驱动臂9的旋转中心的旋转操作从所述弹出位置移动到所述闩锁操作位置。
23.在所述用于车辆的把手装置中,所述杆推动部6可以从所述初始对应位置到所述弹出对应位置与所述闩锁释放杆3处于非接触状态。由于设置在杆推动部6和闩锁释放杆3之间的非接触区域能吸收由于杆推动部6的误差累积等导致的未授权操作,所以能提高操作的可靠性。
24.用于车辆的把手装置可以进一步包括惯性止挡。所述惯性止挡可以构造成在被施加碰撞冲击载荷时旋转到停止位置,并防止所述推动部形成构件5朝向所述闩锁操作对应位置移动。能够可靠地防止由于碰撞冲击载荷导致的未授权开门。
25.根据本发明的实施例,能够防止在由于碰撞引起的冲击的情况下由于闩锁释放杆独自的独立操作而导致的意外门锁释放操作。
附图说明
26.[图1]图1是把手装置的前视图。
[0027]
[图2]图2是把手装置的后视图。
[0028]
[图3]图3是沿着图1的线3a-3a截取的剖视图。
[0029]
[图4]图4(a)示出了驱动臂的驱动源中的电动致动器的动力传动装置。图4(b)示出了驱动臂的驱动源中的凸轮。图4(c)示出了驱动臂的驱动源中的凸轮的线图。
[0030]
[图5]图5(a)示出了在凸轮的操作中驱动臂处于初始对应位置的状态。图5(b)示出了凸轮的操作中的初始对应位置和弹出对应位置之间的状态。图5(c)示出了凸轮的操作中的弹出对应位置。
[0031]
[图6]图6(a)示出了在把手的操作中的把手本体的弹出位置。图6(b)示出了把手的操作中的闩锁操作位置。
[0032]
[图7]图7(a)是闩锁释放杆中的图2的主要部分的放大视图。图7(b)是在图7(a)中的箭头7b的方向上观察到的视图。图7(c)是从图7(b)中的箭头7c的方向观察到的闩锁释放杆的视图。
[0033]
[图8]图8(a)是在图8(b)中箭头8a的方向上观察到的视图。图8(b)是透视图。
[0034]
[图9]图9(a)是在图9(d)中的箭头9a的方向上观察到的视图,示出了推动部形成构件。图9(b)是沿着图9(a)的线9b-9b截取的剖视图。图9(c)是沿着图9(a)的线9c-9c截取的剖视图。图9(d)是推动部形成构件的透视图。
[0035]
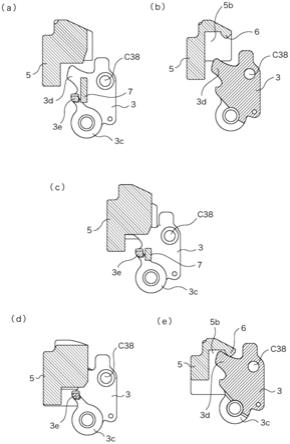
[图10]图10(a)是沿着图7(b)的线10a-10a截取的剖视图。图10(b)是沿着图7(b)的线10b-10b截取的剖视图。图10(c)是在操作连杆处于初始对应位置和弹出对应位置之间的中间位置时对应于图10(a)的视图。图10(d)是在操作连杆处于弹出对应位置时对应于图10(a)的视图。图10(e)是在操作连杆处于弹出对应位置时对应于图10(b)的视图。
[0036]
[图11]图11(a)示出了惯性止挡的操作中的非操作状态。图11(b)示出了惯性止挡在惯性止挡的操作中被冲击载荷旋转到止挡旋转位置的状态。
具体实施方式
[0037]
门把手装置包括把手基座8、把手本体2、将把手本体2连接到把手基座8的驱动臂9以及操作连杆10,并且在把手基座8处固定到车辆的门。
[0038]
在把手基座8固定到门的状态下,把手本体2能从图1和图3所示的初始位置移动到
图6(a)所示的弹出位置,并进一步移动到闩锁操作位置,在该闩锁操作位置所述把手本体2的一端如图6(b)所示从弹出位置被拉起。
[0039]
门把手装置具有齐平表面规格,其中在不使用时把手本体2容纳在门内并且把手本体2的表面与门表面基本上处于同一平面中。把手本体2的初始位置对应于不使用姿势。把手基座8形成有把手容置凹部8a,以在把手本体2处于初始位置时容置把手本体2(见图3)。
[0040]
如图3所示,驱动臂9和操作连杆10连接到把手基座8,以便能围绕旋转中心c98和c108旋转。驱动臂9和操作连杆10相对于把手基座8的旋转中心c98和c108在前后方向(即把手基座8的纵向方向)上彼此适当地间隔开,并且驱动臂9的旋转中心c98设置在操作连杆10的旋转中心c108的前方。
[0041]
在本说明书中,图1的左侧称为“前方”,右侧称为“后方”,指向图1的页面外的方向称为“前表面”方向,其相反方向称为“后表面”方向。
[0042]
电动致动器1(比如马达)固定到把手基座8,并且如图4(a)所示,马达1的动力经由蜗杆1a、蜗轮1b和减速齿轮1c传递到可旋转地连接到把手基座8的凸轮11。
[0043]
被按压部9a形成在驱动臂9上以便对应于围绕旋转中心c11被旋转地驱动的凸轮11,并且被凸轮11推动,从而使得驱动臂9根据凸轮11的旋转围绕旋转中心c98从对应于把手本体2的初始位置的初始对应位置旋转到对应于把手本体2的弹出位置的弹出对应位置。
[0044]
为了确保被按压部9a与凸轮11的接触,扭转弹簧9b安装成围绕把手基座8与驱动臂9之间的连接部c98,以在图3中逆时针偏压驱动臂9。
[0045]
如图4(b)所示,当把手本体2处于初始位置时,凸轮11在起点p1处与被按压部9a接触,并维持与被按压部9a接触的同时在图4(b)中围绕旋转中心c11逆时针旋转达角度θ。当凸轮11在终点p2处与被按压部9a接触时,把手本体2移动到弹出位置。
[0046]
图5(a)至图5(c)是示出驱动臂9由凸轮11操作的状态的说明图。图5(a)示出了驱动臂9处于初始对应位置的状态,图5(c)示出了驱动臂9处于弹出对应位置的状态,而图5(b)示出了驱动臂9处于从初始对应位置到弹出对应位置的途中的状态。图5(b)和5(c)中所示的附图标记h表示驱动臂9与把手本体2的连接点c29的移动量。图4(c)是用于获得该移动量的凸轮11的凸轮线图。横轴表示凸轮11的旋转角度θ,纵轴表示与把手本体2的连接点c29在高度方向上的移动量h。
[0047]
如图4(c)所示,凸轮11构造成使得驱动臂9与把手本体2的连接点c29在高度方向上每单位角度的移动距离的增量在旋转的初始阶段较小,并随着凸轮11接近终点而逐渐增加。紧接在开始由马达1驱动后,凸轮11在竖直方向上缓慢上升,并且随着把手本体2接近弹出位置而被驱动成逐渐增加上升速度。
[0048]
因此,在上升速度较低时的驱动初始阶段,即在把手本体2开始从初始位置移动时,驱动力最大。借助这种构造,例如,即使在围绕把手本体2形成薄冰时,也可以预期有足够的驱动力来使冰破碎,并防止由于冻结而导致的操作不良。
[0049]
当把手本体从弹出位置返回到初始位置时,由于下降速度在初始位置附近降低,因此能够防止与把手基座8、填料等发生碰撞,并且能够防止发生碰撞噪音、反弹等。
[0050]
此外,如图5(c)所示,当驱动臂9处于弹出对应位置时,凸轮11的旋转中心c11设置在从与被按压部9a的接触点向下绘制的法线n附近。因此,从被按压部9a向凸轮11的接触点
p2施加力时的水平分量(即,使凸轮旋转11的力)较小。
[0051]
因此,在把手本体2处于弹出对应位置时,即使朝向初始位置的载荷(即用于推动把手本体2的力)被施加到把手本体2,通常也只有指向旋转中心的力被施加到凸轮11,而垂直于该力的方向上的力较小。因此,施加到凸轮11的旋转操作力较小,并且从蜗轮施加到蜗杆的力可以较小。
[0052]
如图3、图6(a)和图6(b)所示,把手本体2设置有连杆连接部2a,该连杆连接部朝向后表面侧突出并且设置在把手本体的前端部和后端部处,并且在前后连杆连接部2a之间形成手持用凹部2b,其在把手本体2被操作时用作手持部。
[0053]
在一端连接到把手基座8的驱动臂9的另一端可旋转地连接到把手本体2的前连杆连接部2a,并且操作连杆10的另一端连接到后连杆连接部2a。
[0054]
操作连杆10和把手本体2之间的连接是可旋转且可滑动的。在该示例中,固定到后连杆连接部2a并且提供旋转中心c210的连接销12被插入到形成在操作连杆10的端部中的长孔10a中,因此旋转中心c210(即连接销12)是可滑动的。连接销12被插入到长孔10a中,然后视情况通过保持方式得到保持。
[0055]
如图3所示,驱动臂9与把手基座8的旋转中心c98、驱动臂9和把手本体2的旋转中心c29、把手本体2的连接销12以及操作连杆10相对于把手基座8的旋转中心c108设置在平行四边形的顶点位置处。长孔10a具有一个终端位置(初始终端位置,其是连接销12在平行四边形的顶点位置处的位置),并且在向后且稍后表面方向上延伸,即在操作连杆10的连杆长度通过连接销12的滑动而延伸的方向上延伸。
[0056]
如图3所示,操作连杆10被围绕操作连杆10与把手基座8的旋转中心108缠绕的扭转弹簧10b朝向与把手本体2的初始位置相对应的初始对应位置偏压,将驱动臂9朝向与把手本体2的初始位置相对应的初始对应位置偏压的扭转弹簧9b如上所述围绕驱动臂9相对于把手基座8的旋转中心c98缠绕,并且扭转弹簧10b朝向长孔10a中的初始终端位置(即朝向平行四边形的顶点位置)偏压连接销12,并将连接销12保持在该位置。
[0057]
因此,在该示例中,当在把手本体2处于图3所示的初始位置的状态下驱动电动致动器1以沿图3中的逆时针方向旋转凸轮11时,驱动臂9围绕旋转中心顺时针旋转。
[0058]
如上所述,由于操作连杆10和把手本体2被扭转弹簧10b和9b的作用保持在连接销12使操作连杆10b的连杆长度最小的初始对应位置,所以驱动臂9、操作连杆10、把手本体2和把手基座8形成以把手基座8作为固定连杆的平行曲柄机构,并且把手本体2通过驱动臂9的旋转从初始位置在保持平行姿势的同时移动到图6(a)所示的弹出位置。
[0059]
当把手本体2到达弹出位置时,电动致动器1的驱动由开关(未示出)停止,并且把手本体2被保持在弹出位置。当从该状态反向驱动电动致动器1时,驱动臂9通过围绕旋转中心缠绕的扭转弹簧返回到初始对应位置,并且把手本体2返回到初始位置。
[0060]
在弹出位置,把手本体2保持平行于门表面的姿势。此后,通过将把手本体2的后端侧向门的外侧拉出,把手本体2围绕与驱动臂9的旋转中心旋转直到把手本体2与止挡(未示出)发生接触,并且如图6(b)所示,把手本体2能移动到从前端部向后端部倾斜的闩锁释放位置。
[0061]
把手本体2从弹出位置向闩锁释放位置的旋转是通过手动旋转操作进行的,并且伴随把手本体2到闩锁释放位置的旋转操作,操作连杆10进一步旋转超过与把手本体2的弹
出位置相对应的弹出对应位置,并旋转到闩锁操作对应位置。
[0062]
在该示例中,门闩锁装置4的操作通过由固定于操作连杆10的推动部形成构件5对门闩锁释放杆3进行操作来执行。
[0063]
如图7(a)和7(b)所示,推动部形成构件5固定在操作连杆10与把手基座8的旋转中心c108上,并伴随操作连杆10的旋转而围绕旋转中心c108旋转。
[0064]
闩锁释放杆3围绕旋转中心c38可旋转地连接到把手基座8,所述旋转中心垂直于操作连杆10相对于把手基座8的旋转中心c108。如图8(a)和8(b)所示,闩锁释放杆3包括:板状本体部3a;供旋转轴插通的筒部3b,该筒部3b从板状本体部3a突出;以及线缆连接部3c,其用于保持线缆装置13的内部线缆(未示出)的末端,该线缆连接部3c形成在筒部3b附近。
[0065]
闩锁释放杆3被围绕旋转中心c38缠绕的扭转弹簧(未示出)沿图7(c)中的顺时针偏压,并被保持在图7(c)所示的初始位置。
[0066]
此外,闩锁释放杆3包括推动部3d。如将在后面描述的,推动部3d被推动部形成构件5的杆推动部6推动,由此使得闩锁释放杆3在图7(c)中逆时针旋转,以向线缆装置13施加拉动操作力并操作门闩锁装置4(见图2)。
[0067]
如图9(a)至9(d)所示,推动部形成构件5包括位于一端的止挡片5a和位于另一端部的构造成接收闩锁释放杆3的板状本体部3a的凹部5b,并且杆推动部6形成在凹部5b的周缘壁部上。
[0068]
伴随操作连杆10向弹出对应位置的旋转,推动部形成构件5从图10(b)所示的状态移动到图10(e)所示的状态,并且杆推动部6与闩锁释放杆3的推动部3d接触。此后,当把手本体2被操作到闩锁操作位置并且操作连杆10被旋转到操作对应位置时,推动部形成构件5的杆推动部6推动闩锁释放杆3的推动部3d,并且闩锁释放杆3围绕旋转中心c38旋转以操作门闩锁装置4。
[0069]
此外,在推动部形成构件5的杆推动部6附近形成配重部5c,以调节推动部形成构件5的惯性矩。惯性矩的值被设定为这样的大小,即当由于碰撞而产生的冲击力施加到车辆时,由惯性在推动部形成构件5中产生的并指向操作闩锁释放杆3的方向的惯性力将被惯性抵消,并且不会产生在该方向上的旋转。基于推动部形成构件5所需的惯性矩来确定配重部5c的重量、距旋转中心c108的臂长等。
[0070]
因此,在该示例中,即使在施加了碰撞冲击力时,推动部形成构件5中产生的操作力也被推动部形成构件5的惯性矩抵消,因此,闩锁释放杆3不会被推动,从而防止意外地打开门。
[0071]
此外,推动部形成构件5设置有限制壁7,并且闩锁释放杆3设置有限制突起3e。
[0072]
如图8(a)和8(b)所示,限制突起3e从板状本体部3a立设,并且限制壁7形成为凹部5b的壁表面,如图9(c)所示。
[0073]
如图10(a)所示,当推动部形成构件5处于初始对应位置时,闩锁释放杆3在朝向闩锁释放位置的方向上的旋转(即图10(a)中的逆时针旋转)是不可能的,因为限制壁7阻挡了限制突起3e的移动路径,并且能够防止闩锁释放杆3由于冲击力(比如碰撞)而独立地移动到闩锁释放位置,并防止操作门闩锁装置4。
[0074]
由限制壁7对闩锁释放杆3的旋转的限制如图10(c)所示即使在推动部形成构件5的初始对应位置和弹出对应位置之间的中间位置仍在继续,并且在推动部形成构件5如图
10(d)所示到达弹出对应位置时被消除。此后,可以通过由推动部形成构件5的杆推动部6对推动部3d的推动来旋转闩锁释放杆3。
[0075]
此外,在把手装置中并入惯性止挡14,其用于在车辆受到碰撞载荷时限制推动部形成构件5的移动。惯性止挡14可旋转地连接到把手基座8,在图11(a)所示的待机旋转位置和图11(b)所示的停止位置之间旋转,并且被围绕旋转中心c148缠绕的扭转弹簧(未示出)朝向待机旋转位置偏压。
[0076]
惯性止挡14形成为圆柱体,其重心位置设定为在由于碰撞引起的碰撞力被施加时通过惯性从待机旋转位置移动到停止位置。如图11(a)所示,由于推动部形成构件5的止挡片5a的移动路径(图11(a)中围绕旋转中心c108的顺时针旋转)在待机旋转位置处开放,所以跟随操作连杆10到闩锁操作对应位置的旋转操作的旋转被允许。
[0077]
另一方面,当碰撞力从车辆侧方施加到车辆时,惯性止挡14从待机旋转位置旋转到停止位置。如图11(b)所示,当惯性止挡14处于停止位置时,惯性止挡14阻挡推动部形成构件5的止挡片5a的移动路径,因此推动部形成构件5停留在与惯性止挡14干涉的位置,而不跟随操作连杆10的旋转。因此,能够可靠地防止闩锁释放杆3发生操作并且不必要地打开门。
[0078]
本技术基于2019年9月11日提交的日本专利申请(特愿no.2019-165089),其内容通过引用结合于此。
[0079]
附图标记列表
[0080]
1:电动致动器
[0081]
2:把手本体
[0082]
3:闩锁释放杆
[0083]
4:门闩锁装置
[0084]
5:推动部形成构件
[0085]
6:杆推动部
[0086]
7:限制壁
[0087]
8:把手基座
[0088]
9:驱动臂
[0089]
10:操作连杆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1