扭矩传感器装置的制作方法
1.本发明涉及一种扭矩传感器装置,该扭矩传感器装置构造成用于确定某个物体的扭矩,例如从动轴或机器人关节。
背景技术:
2.精确地检测物体(例如某个从动轴或关节)的扭矩是一个与多种应用相关的问题。一个具体的应用涉及机器人关节运动过程中的扭矩测量。在机器人的关节中,各种方向的载荷作用在该关节上,为了精确地检测作用在关节上的旋转方向上的扭矩,通常必须提供一些抵消机构,以便从测量过程中排除除旋转方向之外的方向上的载荷。然而,可靠地排除这种载荷是非常困难的。
3.在现有技术中,已知通过惠斯通电路和包括径向弹性扭矩传递部分的扭矩传感器来补偿除旋转方向之外的方向上的载荷(例如,参见wo2018/041948a1)。
4.然而,已知的扭矩传感器装置仍然存在扭矩测量缺乏准确性和相对庞大的构造的问题,而且,当涉及到通过传感器装置密封齿轮箱的目的时,需要连接到传感器主体的附加构件。
5.因此,需要一种扭矩传感器装置,该扭矩传感器装置允许精确的扭矩测量,并且能够以紧凑的轻质结构形成。
技术实现要素:
6.为了解决上述需求,本发明提供了一种扭矩传感器装置,该扭矩传感器装置包括圆形主体,该圆形主体包括环形内凸缘和环形外凸缘以及位于环形内凸缘和环形外凸缘之间的圆形中间部分,其中环形内凸缘比环形外凸缘更靠近圆形主体的中心定位。圆形中间部分是连续的实心部分(不包括开口/切口),其至少部分地可以在轴向方向上具有比内和/或外凸缘更小的厚度。原则上,圆形主体可以是一体主体,或者可以包括相互附接的部件。
7.这种具有沿径向方向从内凸缘连续延伸到外凸缘的中间部分的紧凑构造允许使用扭矩传感器装置来密封例如齿轮箱,而不需要如现有技术中所必需的附加密封器件,如密封膜例如,扭矩传感器装置适于密封机器人关节的齿轮箱。
8.根据一个实施例,内施力开口形成在内凸缘中,外施力开口形成在外凸缘中。待测量扭矩例如通过所涉及的旋转轴和某静态构件,经由连接到内和外施力开口的连接构件而被传递。因此,可以测量在内凸缘和外凸缘之间施加的扭矩。
9.多个测量换能器可以特别地以成对的方式形成在圆形中间部分中和/或上。测量换能器可以包括硅应变仪、箔应变仪和薄层应变仪中的至少一者或由其组成。特别地,测量换能器对可以关于扭矩传感器装置的轴向方向(在垂直于圆形主体的主表面的方向上延伸穿过圆形主体的中心的轴线)对称地布置。应变仪可以感测剪切应变,特别地,其取向为相对于在平行于圆形主体主表面的方向上穿过圆形主体中心延伸的径向轴线倾斜45
°
,一对应变仪中的应变仪相对于该径向轴线对称地布置。彼此相对定位的测量换能器对限定了测
量通道。该布置允许消除或大大减少倾斜以及径向和轴向载荷对扭矩测量的影响,并且因此允许通过本发明的扭矩传感器装置获得的测量结果的准确度增加(也参见下面的详细描述)。
10.根据特定实施例,多个测量换能器包括至少四对测量换能器,其中每对测量换能器中的两个测量换能器相对于沿平行于圆形主体的主表面的方向延伸穿过圆形主体中心的轴线(径向轴线)对称定位。通过可靠地抑制径向和轴向载荷以及倾斜的影响,这种布置在测量精度方面可以是有利的。
11.四对测量换能器(例如,正好四对测量换能器)可以被设置为其中对于四对测量换能器中的每一对,该对测量换能器中的两个测量换能器相对于第一轴线对称地定位,该第一轴线在平行于圆形主体的主表面的方向上延伸穿过圆形主体的中心,且该第一轴线与第二轴线在周向方向上间隔90
°
,相邻的一对测量换能器中的两个测量换能器相对于该第二轴线对称地定位,且该第二轴线在平行于圆形主体的主表面的方向上延伸穿过圆形主体的中心。由于可靠地抑制了径向和轴向载荷以及倾斜的影响,通过这种布置可以提高测量精度。
12.关于减小径向载荷对所考虑的物体的扭矩测量的影响,在圆形中间部分中形成变窄/变薄部分可能是有利的,所述变窄(tapered out)/变薄(thinned out)部分不完全延伸穿过中间部分的厚度方向,厚度方向即,沿着在垂直于圆形主体的主表面的方向上延伸穿过圆形主体的中心的轴线的方向。变窄/变薄部分例如比内凸缘更靠近外凸缘,并且在圆形方向上比在径向方向上具有更长的延伸范围。
13.特别地,每个变窄部分在周向方向上的中心可以与在平行于圆形主体的主表面的方向上延伸穿过圆形主体的中心的轴线沿周向方向间隔22.5
°
,相对于该轴线,一对测量换能器中的两个测量换能器对称地定位(该轴线限定了测量通道)。
14.作为变窄部分的替代或补充,可以在中间部分提供径向弹性区域,其例如相比于外凸缘更靠近内凸缘或者基本上在内凸缘和外凸缘之间的中间(沿径向方向)。径向弹性区域可以包括形成在圆形主体的中间部分中的凹槽或由其组成。
15.借助于本发明的扭矩传感器装置的扭矩测量可以基于代表测量换能器的应变仪。应变仪可以连接到惠斯通电桥电路,当施加扭矩时惠斯通电桥电路变得不平衡,并输出与施加的扭矩成比例的电压(由应变仪的电阻变化引起)。因此,根据一个实施例,本发明的扭矩传感器装置包括布置在中间部分上的第一印刷电路板,并且该第一印刷电路板包括电连接到测量换能器的惠斯通电桥电路。第一印刷电路板还可以包括用于惠斯通电桥电路的dc或ac激励源。
16.此外,扭矩传感器装置可以包括布置在第一印刷电路板上方的第二印刷电路板,并且第二印刷电路板包括用于信号调节的电路,特别是用于由第一印刷电路板的惠斯通电桥电路提供的信号的模数转换和/或放大的器件。第二印刷电路板可以覆盖第一印刷电路板,以便保护它和形成在第一印刷电路板上的以及位于第二印刷电路板的面对第一印刷电路板的底部的敏感电路。
17.此外,提供了一种机器人,特别是协作机器人,包括关节,其中关节包括齿轮箱,并且其中机器人还包括根据上述实施例之一的扭矩传感器装置。特别地,扭矩传感器装置可以定位成密封机器人关节的齿轮箱。
18.另外,提供了一种用于测量定位在齿轮箱中的轴的扭矩的方法,特别是机器人的关节的齿轮箱,该方法包括将根据上述实施例之一的扭矩传感器装置附接到齿轮箱,使得齿轮箱被密封,并通过密封齿轮箱的扭矩传感器装置测量扭矩。
附图说明
19.将参照附图详细解释本公开的进一步特征和示例性实施例以及优点。应当理解,本公开不应被解释为受以下实施例的描述的限制。还应该理解,下面描述的一些或所有特征也可以以替代方式组合。在附图中:
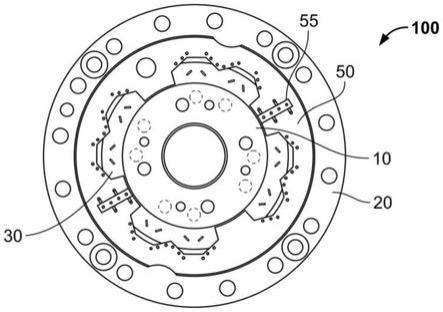
20.图1a和图1b示出了根据本发明实施例的扭矩传感器装置,每个扭矩传感器装置包括内凸缘、外凸缘和沿径向方向从内凸缘连续延伸到外凸缘的实心中间部分。
21.图2示出了图1a或1b的扭矩传感器装置,并且包括第一印刷电路板。
22.图3示出了图2的扭矩传感器装置,并且包括第二印刷电路板。
23.图4a至4d示出了带倾斜、轴向载荷和径向载荷补偿的扭矩测量。
24.图5示出了扭矩传感器装置的另一个实施例,该扭矩传感器装置在中间部分包括变窄区。
具体实施方式
25.本发明提供了一种扭矩传感器装置,其允许精确测量物体的扭矩,物体例如旋转轴或机器人关节,其中测量不受轴向或径向载荷或倾斜力矩的显著影响。特别地,扭矩传感器装置可以用于密封目的,例如用于密封齿轮箱。例如,扭矩传感器装置适于测量(协作)机器人的关节的扭矩。例如,基于由扭矩传感器装置进行的测量的扭矩控制可以有利地在机器人中实施,以便于机器人
‑
人的相互作用。
26.图1a和1b示出了本发明的扭矩传感器装置100的示例性实施例。扭矩传感器装置100包括内凸缘10和外凸缘20。中间部分30从内凸缘10向外凸缘20连续径向延伸。内凸缘10、外凸缘20和中间部分30形成圆形主体,例如一体式圆形主体。圆形主体可以由例如钢、铝或铝合金组成或包括例如钢、铝或铝合金。当没有提供一体式圆形主体时,圆形主体的不同部分可以由不同的材料制成。在中间部分30中没有形成延伸穿过整个材料的开口。因此,中间部分30可以用作密封件,例如,用于密封齿轮箱。
27.中间部分30可以包括子部分30a和30b,它们可以通过分离器30c彼此分开。分离器30c可以是边缘部,或者它可以是如图1b所示的圆周凹槽30c。这种周向凹槽30c可以用作径向弹性部分,其被设置为抑制在测量扭矩的过程中径向载荷的影响(也参见下面的描述)。
28.多个成对的测量换能器40形成在中间部分30上,例如子部分30a上,如图1a的扭矩传感器装置100的主表面的俯视图所示。测量换能器40关于垂直于主表面穿过圆形主体中心的轴线(轴向轴线)对称布置。原则上,测量传感器40可以是应变敏感换能器,特别是应变仪。
29.此外,在内凸缘10中形成具有不同尺寸的内力施加开口11和12,并且在外凸缘20中形成具有不同尺寸的外力施加开口21和22。内和外施力开口11、12、21和22可以是沿轴向方向延伸的孔。孔在至少一侧或相应的凸缘上是开口的,并且可以具有任何合适的几何形状,例如圆形或多边形横截面。
30.图2示出了图1a或1b的扭矩传感器,其中包括一些电路装置(例如电阻器和电容器)的第一印刷电路板50以及用于连接到另一印刷电路板60(见下文)的连接器55设置在中间部分30上。测量换能器40可以通过包括的测量部分连接到中间部分30,并且它们可以具有用于连接到第一印刷电路板50的自由连接部分,从而连接到第一印刷电路板50的电路装置。特别地,第一印刷电路板50可以包括惠斯通电桥元件(电阻器),用于将施加的扭矩转换成电压输出信号,如本领域已知的根据实际应用,可以使用半或全惠斯通电桥。
31.如图3所示,第一印刷电路板50可以被第二印刷电路板60覆盖。第二印刷电路板60保护测量换能器40和电路装置55免受环境影响。特别地,第二印刷电路板60可以在底部(面对第一印刷电路板50)具有敏感电路装置,并且具有用于连接到第一印刷电路板的连接器65。第二印刷电路板60被配置用于信号调节,例如,用于由第一印刷电路板50的电路装置提供的电压输出信号的模数转换。信号调节还可以包括放大由第一印刷电路板50的电路装置提供的电压输出信号。
32.如已经提到的,测量换能器40可以围绕在垂直于圆形主体主表面的方向上穿过圆形主体中心的轴向轴线布置。例如,一对或两对测量换能器40可以沿周向方向与一对或两对相邻的测量换能器40间隔90
°
布置。图4a至4d示出了一个实施例,其中应变仪40关于在垂直于圆形主体的主表面的方向上延伸穿过圆形主体的中心的轴向轴线成对对称地布置,并且其中两个测量通道c由在周向方向上彼此间隔90
°
(从一个通道到另一个通道)的应变仪的相对的对40限定。每个测量通道c穿过彼此相对设置的、应变仪40的特定对的中心。
33.扭矩(由图4a中的箭头指示)可以基于差别应变+ε和
‑
ε来测量,其中+ε由一对应变仪40中的一个应变仪承受,而
‑
ε由一对应变仪40中的另一个应变仪承受。应变仪40连接到印刷电路板50上形成的惠斯通电桥电路。由于应变仪40的布置的选定几何形状(以及惠斯通电桥电路的对应结构),由施加的扭矩(在其上提供应变仪40用于感测应变的扭矩传感器装置的中间部分中的应变)引起的惠斯通电桥电路提供的电压输出信号与σε=4ε+4ε=8ε成比例,即,可以提供足够高的期望电压输出信号。
34.另一方面,如图4b至4d所示,由于倾斜以及轴向和径向载荷引起的扰动可以被极大地抑制。图4b中的箭头表示可能施加到扭矩传感器装置的倾斜。施加到扭矩传感器装置100的倾斜分别导致限定测量通道c的四对应变仪40的不同应变+ε1和+ε2、+ε2和+ε1、
‑
ε2和
‑
ε1以及
‑
ε1和
‑
ε2。因此,由倾斜引起的应变由应变仪40的布置的选定几何形状(以及惠斯通电桥电路的对应结构)来补偿:σε=ε1
‑
ε1+ε2
‑
ε2=0,因此它不会贡献于与施加的扭矩成比例的电压输出信号,如图4a所示。
35.为了实现精确的扭矩测量,还需要补偿任何轴向载荷。如图4c所示(箭头表示施加的轴向载荷),这种补偿也可以通过应变仪40的布置的选定几何形状(以及惠斯通电桥电路的对应结构)来实现。轴向载荷(由于应变仪40的轴向对称布置)导致每个应变仪40处的应变+ε,因此净效应为零:σε=4ε
‑
4ε.关于倾斜和轴向载荷的补偿,将应变仪40定位在与内凸缘10和外凸缘20相同的径向距离处可能是有利的。
36.在图4d中示出了通过应变仪40的布置的选定几何形状(和惠斯通电桥电路的对应结构)对径向载荷的补偿。箭头表示施加的径向载荷。对于限定两个测量通道c的四对应变仪40,径向载荷分别导致不同的应变
‑
ε1和+ε2、+ε2和
‑
ε1、
‑
ε1和+ε2以及+ε2和
‑
ε1。因此,对印刷电路板50的惠斯通电桥电路的电压输出信号的贡献与ωε=
‑
2ε1+2ε2+2ε1
‑
2ε2=0成
比例。
37.然而,必须注意的是,如果一些径向载荷施加在相对于测量通道c在周向方向上偏移22.5
°
的径向方向上,则可能无法实现如图4d所示的对径向载荷的精确补偿。在这种情况下,可能会出现σε≠0,对扭矩测量的精度产生负面影响。为了减轻这个问题,在扭矩传感器装置100的中间部分30中提供径向弹性部分。径向弹性部分由凹槽30c实现,如图1b所示。径向弹性部分可以在中间部分30的顶部或底部加工。
38.根据另一种方法,针对在相对于测量通道c在周向方向上偏移22.5
°
的径向方向上施加的径向载荷的非补偿性问题,如图5所示,在扭矩传感器装置100’的中间部分30中可以形成变窄部分70。变窄部分70可以在中间部分30的顶部或底部加工。在图5所示的实施例中,变窄外部分70在22.5
°
的位置相比于内凸缘10更靠近外凸缘20布置。变窄部分70在周向方向上的尺寸大于径向方向。
39.实验已经证明,变窄部分70的这种布置显著降低了对应径向载荷对σε的任何贡献,从而降低了测量结果。必须注意,变窄部分70不必穿过中间部分30,以便不降低扭矩传感器装置100’的有利密封性能。
40.根据上述实施例,与现有技术相比,可以以紧凑的设计提供精确操作的扭矩传感器装置,该装置具有降低的高度并且成本低。它可以密封齿轮箱,而不需要任何额外的密封器件,并提供至少两个通道的测量。特别地,所有涉及的测量换能器可以形成在上述扭矩传感器装置100、100’的中间部分30的同一个表面上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1