一种机械灵巧手及机器人的制作方法
1.本发明涉及机器人技术领域,特别是涉及一种机械灵巧手及机器人。
背景技术:
2.机械灵巧手是人形机器人最复杂的结构之一,为了更进一步地接近于真实人手,需同时满足抓握力、抓握精度、自适应以及自由度等各方面条件。目前机械灵巧手的手指多为单自由度结构,只能适用于对要抓取的物体有一定外形要求的场合,应用范围十分受限,因此,如何改进机械灵巧手以更好地适应物体外形,完成更多动作,成为本领域技术人员亟待解决的技术问题。
技术实现要素:
3.有鉴于此,本发明提供了一种机械灵巧手及机器人,该机械灵巧手在不改变手指外形结构的前提下,有效地提升了机械手指的自由度和灵活度,因而能够完成对更多不同外形的物体的抓取,有利于扩大机械灵巧手的应用范围。
4.为了达到上述目的,本发明提供如下技术方案:
5.一种机械灵巧手,包括掌骨单元、与所述掌骨单元铰接的第一指节单元和与所述第一指节单元铰接的第二指节单元,所述第一指节单元包括双摇杆机构,所述双摇杆机构的连杆与所述第二指节单元连接,所述双摇杆机构的第一摇杆和第二摇杆与所述掌骨单元连接,所述掌骨单元包括用于驱动所述第一指节单元相对所述掌骨单元转动的直线驱动器,所述直线驱动器沿掌骨方向布置,所述第一指节单元或者所述第二指节单元包括用于驱动所述第二指节单元相对所述第一指节单元转动的丝杠螺母机构,所述丝杠螺母机构的丝杠沿指节方向布置。
6.可选地,在上述机械灵巧手中,所述第二指节单元与所述双摇杆机构的连杆铰接,所述丝杠螺母机构设置于所述第二指节单元,所述双摇杆机构的连杆与所述丝杠螺母机构的螺母分别与连接杆铰接构成曲柄滑块机构。
7.可选地,在上述机械灵巧手中,所述双摇杆机构的连杆与所述第一摇杆的铰接点或者与所述第二摇杆的铰接点为所述第二指节单元与所述双摇杆机构的连杆的铰接点。
8.可选地,在上述机械灵巧手中,所述第一摇杆或者所述第二摇杆为由所述丝杠螺母机构连接的分体式结构,所述第二指节单元与所述双摇杆机构的连杆固定连接。
9.可选地,在上述机械灵巧手中,设置有所述丝杠螺母机构的所述第一摇杆或者所述第二摇杆的分体之间通过导向杆连接,所述导向杆平行于所述丝杠螺母机构的丝杠布置。
10.可选地,在上述机械灵巧手中,所述第一指节单元包括复位弹簧,所述复位弹簧的一端与所述掌骨单元连接,另一端与所述第一摇杆或者所述第二摇杆连接。
11.可选地,在上述机械灵巧手中,所述第一摇杆与所述连杆的铰接点比所述第二摇杆与所述连杆的铰接点靠近手心侧,所述第一摇杆与所述掌骨单元的铰接点比所述第二摇
杆与所述掌骨单元的铰接点靠近手背侧。
12.一种机器人,包括如上述任意一项所公开的机械灵巧手。
13.根据上述技术方案可知,本发明提供的机械灵巧手不但在掌骨单元设置了用于驱动第一指节单元相对掌骨单元转动的直线驱动器,还在第一指节单元或者第二指节单元设置了用于驱动第二指节单元相对第一指节单元转动的丝杠螺母机构,在不改变手指外形结构的前提下,有效地提升了机械手指的自由度和灵活度,因而能够完成对更多不同外形的物体的抓取,有利于扩大机械灵巧手的应用范围。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
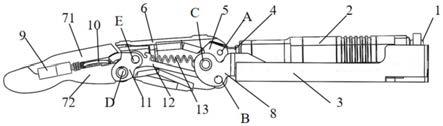
15.图1是本发明提供的机械灵巧手的外观示意图;
16.图2是本发明实施例一提供的机械灵巧手的内部结构示意图;
17.图3是图2的局部放大图;
18.图4是图3中丝杠螺母机构的示意图;
19.图5~图7是本发明实施例一提供的机械灵巧手的屈伸状态示意图;
20.图8~图10是本发明实施例一提供的机械灵巧手抓取物体的过程示意图;
21.图11是本发明实施例二提供的机械灵巧手的内部结构示意图;
22.图12是本发明实施例二提供的机械灵巧手中的丝杠螺母机构的示意图;
23.图13~图15是本发明实施例二提供的机械灵巧手的屈伸状态示意图;
24.图16~图18是本发明实施例二提供的机械灵巧手抓取物体的过程示意图。
25.图中标记为:
26.x、掌骨单元;y、第一指节单元;z、第二指节单元;a~g、铰接点;
27.1、球铰;2、直线驱动器;3、手掌固定座;4、伸缩杆;5、摆杆;6、第一摇杆;7、包覆体;71、上覆体;72、下覆体;8、机架;9、丝杠螺母机构;91、马达;92、减速器;93、轴承组;94、螺母;95、丝杠;96、螺母;10、连接杆;11、连杆;12、第二摇杆;13、复位弹簧;14、第一分体;15、壳体;16、导向杆;17、第二分体。
具体实施方式
28.为了便于理解,下面结合附图对本发明作进一步的描述。
29.参见图1,本发明提供的机械灵巧手包括掌骨单元x、第一指节单元y和第二指节单元z,第一指节单元y的两端分别与掌骨单元x和第二指节单元z铰接。
30.实施例一
31.参见图2~图4,在本发明实施例一提供的机械灵巧手中,掌骨单元x包括直线驱动器2、手掌固定座3、摆杆5和机架8,其中,直线驱动器2沿掌骨方向布置,直线驱动器2靠近手腕的一端通过球铰1与手掌固定座3连接,另一端具有伸缩杆4,伸缩杆4与摆杆5铰接于a点,机架8与手掌固定座3固定连接,摆杆5与机架8铰接于c点。当直线驱动器2的伸缩杆4向前移
动时,能够使摆杆5相对机架8转动,从而驱动第一指节单元y相对掌骨单元x转动。
32.第一指节单元y包括双摇杆机构,该双摇杆机构包括第一摇杆6、连杆11和第二摇杆12,其中,第一摇杆6的一端与机架8铰接于c点,另一端与连杆11铰接于d点,第二摇杆12的一端与机架8铰接于b点,另一端与连杆11铰接于e点,另外,第二摇杆12上挂有复位弹簧13,复位弹簧13的另一端连接于摆杆5的一结构孔上,或者与机架8连接于c点附近。
33.第二指节单元z包括上覆体71、下覆体72,以及位于两者之间的丝杠螺母机构9,其中,下覆体72与连杆11铰接于d点,丝杠螺母机构9用于驱动第二指节单元z相对第一指节单元y转动。丝杠螺母机构9包括马达91、减速器92、轴承组93、螺母94和丝杠95,马达91通过减速器92将动力输出给丝杠95,丝杠95在轴承组93的支撑下相对上覆体71和下覆体72转动。丝杠95沿指节方向布置,螺母94通过连接杆10与连杆11连接构成曲柄滑块机构,螺母94与连接杆10铰接于f点,连杆11与连接杆10铰接于g点。
34.容易理解的是,掌骨单元x、第一指节单元y和第二指节单元z可以应用于机械灵巧手的任意一根机械手指,下面介绍机械手指在直线驱动器2和马达91两个动力源下的屈伸运动,分为三种情况:
35.情况a,直线驱动器2运动,马达91保持不动。
36.如图5所示,初始状态时,机械手指伸直。直线驱动器2开始运动后推动伸缩杆4向前移动,伸缩杆4推动摆杆5以c点为中心旋转,由于第一摇杆6在复位弹簧13的作用下与摆杆5保持贴合,所以第一摇杆6随摆杆5一同旋转。根据双摇杆机构的运动原理,当伸缩杆4向前移动到极限位置时,在第一摇杆6和第二摇杆12的带动下,连杆11运动到图6所示的状态,机械手指形成弯曲。虽然第二指节单元z与连杆11是铰接的,但由于马达91保持不动,所以第二指节单元z与连杆11在情况a无相对运动。
37.情况b,直线驱动器2保持不动,马达91运动。
38.同样地,初始状态如图5所示,机械手指伸直。马达91开始运动后驱动丝杠95旋转,螺母94在丝杠95的带动下向连杆11移动,根据曲柄滑块机构的运动原理,当螺母94移动到离马达91最远的位置时,第二指节单元z相对连杆11转动到图7所示的状态,与图6的状态相比,机械手指仅局部形成弯曲。
39.情况c,直线驱动器2运动,马达91运动。
40.这种情况,尤其适用于机械手指自适应物体外形的运动。参见图8~图10,为机械手指从伸展状态到第一指节单元y和第二指节单元z均触碰物体(以图中的圆圈表示)的屈曲状态的整个过程。
41.需要说明的是,实施例一选择连杆11与第一摇杆6的铰接点(即d点)作为第二指节单元z与连杆11的铰接点,能够起到简化结构的作用,当然,第二指节单元z与连杆11也可以铰接于e点或者其他位置,只要螺母94、连接杆10和连杆11能够构成曲柄滑块机构即可。
42.实施例二
43.与实施例一不同的是,实施例二将丝杠螺母机构9设置于第一指节单元y,而且,第二指节单元z与双摇杆机构的连杆11固定连接。如图11和图12所示,包覆体7与连杆11固定连接,第二摇杆12为分体式结构,包括第一分体14和第二分体17,需要说明的是,图12展示的是第一分体14和第二分体17剖开后的内部结构,第一分体14具有壳体15,壳体15内设置有马达91、减速器92和轴承组93,马达91通过减速器92将动力输出给丝杠95,丝杠95在轴承
组93的支撑下相对第一分体14转动,丝杠95上的螺母96嵌在第二分体17的凹槽内,由于复位弹簧13挂在第二分体17上,所以第二分体17在复位弹簧13的作用力下始终与螺母96保持贴合,当螺母96在丝杠95上移动时,第二摇杆12的长度发生改变,从而使连杆11的姿态发生改变,由于第二指节单元z与连杆11固定连接,所以第二指节单元z随连杆11一起运动。
44.第二摇杆12的长度发生改变时,第一分体14与第二分体17发生相对运动,为了提高运动的稳定性,可以在两个分体之间设置导向杆16,如图12所示,导向杆16平行于丝杠螺母机构9的丝杠布置,其一端与第二分体17固定连接,另一端插入第一分体14的导向孔中,导向杆16与导向孔滑动连接。
45.下面介绍实施例二的机械手指在直线驱动器2和马达91两个动力源下的屈伸运动,同样分为三种情况:
46.情况a,直线驱动器2运动,马达91保持不动。
47.如图13所示,初始状态时,机械手指伸直。由于马达91保持不动,所以第一分体14和第二分体17相对位置不变,即第二摇杆12的长度不发生改变,因此机械手指的运动方式与实施例一的情况a相同。直线驱动器2开始运动后推动伸缩杆4向前移动,当伸缩杆4向前移动到极限位置时,在第一摇杆6和第二摇杆12的带动下,连杆11运动到图14所示的状态,机械手指形成弯曲。
48.情况b,直线驱动器2保持不动,马达91运动。
49.同样地,初始状态如图13所示,机械手指伸直。马达91开始运动后驱动丝杠95旋转,螺母96在丝杠95的带动下向远离马达91的方向移动,第一分体14和第二分体17之间的距离变大,即第二摇杆12的长度增大,迫使连杆11以d点为中心旋转,由于第二指节单元z与连杆11固定连接,所以第二指节单元z同样以d点为中心旋转。当螺母96移动到离马达91最远的位置时,第二指节单元z相对第一指节单元y转动到图15所示的状态,与图14的状态相比,机械手指仅局部形成弯曲。
50.情况c,直线驱动器2运动,马达91运动。
51.这种情况,尤其适用于机械手指自适应物体外形的运动。参见图16~图18,为机械手指从伸展状态到第一指节单元y和第二指节单元z均触碰物体(以图中的圆圈表示)的屈曲状态的整个过程。
52.不难理解的是,与第二摇杆12相类似,第一摇杆6同样可以设计为由丝杠螺母机构9连接的分体式结构。在实施例一和实施例二中,第一摇杆6与连杆11的铰接点比第二摇杆12与连杆11的铰接点靠近手心侧,第一摇杆6与掌骨单元x的铰接点比第二摇杆12与掌骨单元x的铰接点靠近手背侧,即第一摇杆6与第二摇杆12呈交叉布置,在其他的实施例中,两个摇杆也可不以交叉形式布置。另外,复位弹簧13也可以选择挂在第一摇杆6上,只要能够使第一摇杆6与摆杆5保持贴合即可。当然,如果将第一摇杆6与摆杆5设计为一体式结构,也可以省去复位弹簧13,利用直线驱动器2主动实现复位。
53.由实施例一和实施例二介绍的屈伸运动可知,直线驱动器2和马达91两个动力源提升了机械手指的自由度和灵活度,使机械灵巧手能够更好地适应物体外形,完成更多动作,因而本发明提供的机械灵巧手能够完成对更多不同外形的物体的抓取,具有更大的适用范围。
54.本发明还提供一种机器人,该机器人包括上述实施例公开的机械灵巧手。由于上
述实施例公开的机械灵巧手具有上述技术效果,因此具有该机械灵巧手的机器人同样具有上述技术效果,本文在此不再赘述。
55.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1