一种刚软耦合欠驱动灵巧手装置的制作方法
1.本发明属于机器人领域,涉及一种机器人装置,尤其涉及一种刚软耦合欠驱动灵巧手装置。
背景技术:
2.最初的机械手作为工业生产线上的末端操作器,结构简单,关节与自由度都较少,其抓取对象通常单一特定,适应性窄。随着驱动电机的发展、传动结构的优化以及传感器系统的完善,便开始仿照人手进行机械手设计,使其尽量还原人手的高自由度、结构紧凑、功能复杂等特点,提高通用性和稳定性。此外,“智能制造2025”等国家政策的提出,拓展了机器人的应用领域,对其末端执行器灵活性的要求也相应提高,如小型物体的精细化操作、不规则物体的自适应抓取等。通过机器人技术和相关学科的带动,许多优秀的灵巧手装置被研制出来,例如utah/mit,buaa,allegro等全驱动灵巧手,robonaut,dlr/hit,pisa/iit,shadow,i
‑
limb等欠驱动灵巧手。相较与全驱动灵巧手,欠驱动灵巧手结构相对简单、控制方便、便于集成,且柔顺性较好,因而成为当前研究的重点。
3.另外根据材料不同,灵巧手还可分为刚性手和软体手两类。经典的刚性手通过位置和力传感器可以实现精确可靠的抓取控制,从而实现精细化操作。而软体手的优势在于更强的环境适应性和交互安全性,非常适合抓取表面脆弱易损伤的物体。若在设计中结合使用刚性材料和软体材料,综合两者的长处,消除各自的短板,就能进一步扩展提升灵巧手的抓取能力。刚软耦合灵巧手的设计思路便是由此而来,其中具体的耦合形式有结构耦合和材料相变等。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种刚软耦合欠驱动灵巧手装置,该装置通过刚性和软材料的串联连接,使欠驱动灵巧手在操作灵活的基础上,获得更好的自适应性和柔顺性,扩大机械手在食品、医疗等方面的应用领域。
5.为了达到上述目的,本发明的技术方案如下:
6.一种刚软耦合欠驱动灵巧手装置,包括手指、手掌6、手掌连接底座7和固定平台8;所述手指包括拇指1、食指2、中指3、无名指4、小指5,五个手指的结构相同,每个手指设有三个指节和三个关节,使手指具有三个“张开闭合”的自由度,其中拇指1还通过手掌6上的锥齿轮机构另外增加一个“摆动”自由度。所述五个手指的指节均由软体材料制成,所有手指的关节均由刚性材料制成,指节和关节依次交替粘接形成刚软耦合结构。所有手指的根部固定于手掌6上,手掌6与手掌连接底座7通过螺纹连接方式固定,手掌连接底座7与固定平台8通过螺纹连接方式固定。五个手指分别通过腱绳204驱动,所有的驱动系统集成于刚软耦合欠驱动灵巧手装置内部。
7.因为五个手指的结构相同,以食指2为例对手指结构进行说明:
8.所述食指2包括食指第一指节201、食指第二指节202、食指第三指节203、腱绳204、
近关节组件、中关节组件和远关节组件,其中,第一指节201、第二指节202均由软体材料成型,三个关节组件的结构组成相同。所述近关节组件包括上外壳一205、下外壳一206、转轴一207、扭簧一208、扭簧二209、卡簧一210、卡簧二211、滑轮一212、端盖一213和端盖二214;中关节组件包括上外壳二215、下外壳二216、转轴二217、扭簧三218、扭簧四219、卡簧三220、卡簧四221、滑轮二222、端盖三223和端盖四224;远关节组件包括上外壳三225、下外壳三226、转轴三227、扭簧五228、扭簧六229、卡簧五230、卡簧六231、滑轮三232、端盖五233和端盖六234。
9.所述的下外壳一206的端面设有两个螺纹孔用于与手掌6螺纹连接;食指第一指节201的两个端面分别与上外壳205一、下外壳二216的端面粘接,食指第二指节202的两个端面分别与上外壳二215、下外壳三226的端面粘接,食指第三指节203的端面与上外壳三225的端面粘接。所述近关节组件中,转轴一207穿过上外壳一205和下外壳一206的轴孔而将它们连接起来,转轴一207上的扭簧一208和扭簧二209安装脚穿过上外壳一205和下外壳一206而被固定,滑轮一212的位置由转轴一207上的卡簧一210和卡簧二211共同固定,转轴一207的位置则由端盖一213和端盖二214共同固定。所述中关节组件中,转轴二217穿过上外壳二215和下外壳二216的轴孔而将它们连接起来,转轴二217上的扭簧三218和扭簧四219安装脚穿过上外壳二215和下外壳二216而被固定,滑轮二222的位置由转轴二217上的卡簧三220和卡簧四221共同固定,转轴二217的位置则由端盖三223和端盖四224共同固定。所述远关节组件中,转轴三227穿过上外壳三225和下外壳三226的轴孔而将它们连接起来,转轴三227上的扭簧五228和扭簧六229安装脚穿过上外壳三225和下外壳三226而被固定,滑轮三232的位置由转轴三227上的卡簧五230和卡簧六231共同固定,转轴三227的位置则由端盖五233和端盖六234共同固定。各个关节的转角范围由关节外壳的形状限定。
10.所述的食指2中的滑轮一212、滑轮二222和滑轮三232,扭簧一208、扭簧二209、扭簧三218、扭簧四219、扭簧五228、扭簧六229和腱绳204共同组成食指2的欠驱动系统。所述腱绳204穿过各个指节、关节且绕过各滑轮,起到驱动的作用,各个关节的转动由腱绳204的收缩或放松来实现。所述腱绳204的一端与手掌6连接,腱绳204的另一端固定于远关节组件中上外壳三225的端面上。在腱绳204驱动食指2运动的过程中,第一指节201、第二指节202只发生较小的变形,直到碰到物体后才会由于腱绳204力的作用逐渐发生大的变形。
11.所述的手掌6包括手掌外壳601、食指连接底座602、中指连接底座603、无名指连接底座604、小指连接底座605、拇指传动连接组件和电机固定组件。其中电机固定组件包括第一电机606、第二电机607、第三电机608、第四电机609、第五电机610、第六电机611,以及端固定块一612、端固定块二613、端固定块三614、绕线槽轮一615和上固定块一616、下固定块一617。所述上固定块一616和下固定块一617各有7个,用于固定各电机,其中下固定块一617设有四个螺纹孔用于与手掌外壳601螺纹连接,上固定块一616的四个螺纹孔用于与下固定块一617连接,各个电机分别固定在上固定块一616和下固定块一617中间,其中,用于锥齿轮传动的第六电机611由两对上固定块一616和下固定块一617固定;绕线槽轮一615共5个,分别通过顶丝与第一电机606、第二电机607、第三电机608、第四电机609、第五电机610的输出轴固连;端固定块一612上设有三个螺纹孔和三个通孔,端固定块二613和端固定块三614各有两个螺纹孔和一个通孔,其中螺纹孔用于与手掌外壳601螺纹连接,通孔用于放置绕线槽轮一615;所述食指连接底座602呈l形,水平端面设有两个螺纹孔用于与食指2近
关节组件中的下外壳一206固定,竖直断面设有三个螺纹孔用于与手掌外壳601固定,且竖直端面上设有一个螺钉,腱绳204从下外壳一206穿出后绕过该螺钉,再穿过绕线槽轮一615上的小孔与绕线槽轮一615粘接固定;中指连接底座603、无名指连接底座604、小指连接底座605与食指连接底座602结构相同。中指3上的腱绳204以相同方式与第二电机607相连,无名指4上的腱绳204以相同方式与第三电机608相连,小指5上的腱绳204以相同方式与第四电机609相连,拇指上的腱绳204以相同方式与第五电机610相连。
12.所述的手掌6中的拇指传动连接组件包括锥齿轮一618、锥齿轮二619、导线块620、定位块621、腱绳204、腱绳导管622、拇指连接底座623。所述的导线块620位于端固定块三614下方,与手掌外壳601螺纹连接,导线块620设有通孔,用于导引腱绳204。腱绳204的一端固定于第五电机610的绕线槽轮一615上,然后绕过绕线槽轮一615,穿过导线块620的通孔并伸出,接着进入腱绳导管622中,再穿过拇指连接底座623进入拇指1的近关节组件中。腱绳导管622的一端粘接固连在导线块620的腱绳伸出端,另一端粘接固定在拇指连接底座623的腱绳入口处,使腱绳204在导线块620与拇指连接底座623之间的连接长度始终与腱绳导管622的长度相同。通过第五电机610的正反向转动使得腱绳204收缩与放松,实现拇指1的屈曲与伸展。拇指1的摆动依靠锥齿轮传动结构来实现:锥齿轮一618通过顶丝与第六电机611固连,锥齿轮二619与锥齿轮一618的转轴呈135
°
啮合,锥齿轮二619转轴安装在定位块621上,拇指连接底座623通过顶丝固定在锥齿轮二619和定位块621之间,并与锥齿轮二619同步转动。
13.与现有技术相比,本发明的有益效果是:
14.(1)由于在指节处采用了软体材料,因此整个手指在非结构环境下具有很好的柔顺性,避免与环境发生碰撞后而损坏,同时,在抓取物体的过程中,还可以由于软体材料的受力变形,而实现随形包络抓取物体,增强了抓取的稳定性。
15.(2)由于手指在运动过程中,未碰到物体前,指节只发生较小的变形,此时起主要作用的是每个关节的转动,这有利于实现指尖捏取物体。
16.(3)本发明采用更加严格的模块化设计思想,五个手指结构相同,与手掌完全独立,加工和装配更加简洁。
附图说明
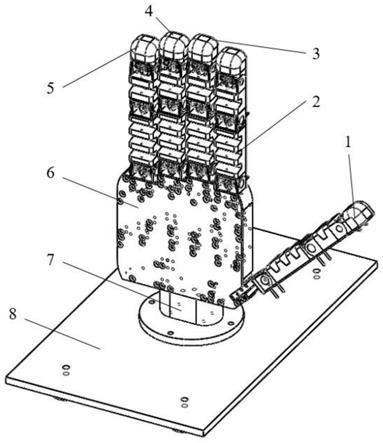
17.图1是本发明实例中所用刚软耦合欠驱动灵巧手装置的整体结构图。
18.图2是本发明实例中所用刚软耦合欠驱动灵巧手装置的食指正侧结构图。
19.图3是本发明实例中所用刚软耦合欠驱动灵巧手装置的食指背侧结构图。
20.图4是本发明实例中所用刚软耦合欠驱动灵巧手装置的手掌结构图。
21.图5是本发明实例中所用刚软耦合欠驱动灵巧手装置手掌中的拇指传动连接组件。
22.图中:1拇指,2食指,3中指,4无名指,5小指,6手掌,7手掌连接底座,8固定平台,201食指第一指节,202食指第二指节,203食指第三指节,204腱绳,205上外壳一,206下外壳一,207转轴一,208扭簧一,209扭簧二,210卡簧一,211卡簧二,212滑轮一,213端盖一,214端盖二,215上外壳二,216下外壳二,217转轴二,218扭簧三,219扭簧四,220卡簧三,221卡簧四,222滑轮二,223端盖三,224端盖四,225上外壳三,226下外壳三,227转轴三,228扭簧
五,229扭簧六,230卡簧五,231卡簧六,232滑轮三,233端盖五,234端盖六,601手掌外壳,602食指连接底座,603中指连接底座,604无名指连接底座,605小指连接底座,606第一电机,607第二电机,608第三电机,609第四电机,610第五电机,611第六电机,612端固定块一,613端固定块二,614端固定块三,615绕线槽轮一,616上固定块一,617下固定块一,618锥齿轮一,619锥齿轮二,620导线块,621定位块,622腱绳导管,623拇指连接底座。
具体实施方式
23.下面结合附图和实例对本发明作进一步说明。
24.如图1所示,一种刚软耦合欠驱动灵巧手装置,包括手指、手掌6、手掌连接底座7和固定平台8;其中手指包括拇指1、食指2、中指3、无名指4、小指5,五个手指的结构相同,每个手指设有三个指节和三个关节,使手指具有三个“张开闭合”的自由度。拇指1还通过手掌6上的锥齿轮机构另外增加了一个“摆动”自由度。五个手指的指节均由软体材料制成,所有手指的关节均由刚性材料制成,指节和关节依次交替粘接形成刚软耦合结构。所有手指的根部固定于手掌6上,手掌6与手掌连接底座7以螺纹连接方式固定,手掌连接底座7与固定平台8以螺纹连接方式固定。五个手指分别通过腱绳驱动,所有的驱动系统集成于刚软耦合欠驱动灵巧手装置内部。
25.如图2、图3所示,一种刚软耦合欠驱动灵巧手装置,因为五个手指的结构相同,因此这里以食指2为例进行说明。所述食指2包括食指第一指节201、食指第二指节202、食指第三指节203、腱绳204、近关节组件、中关节组件和远关节组件,其中,第一指节201、第二指节202均由软体材料成型,三个关节组件的结构组成相同。所述近关节组件包括上外壳一205、下外壳一206、转轴一207、扭簧一208、扭簧二209、卡簧一210、卡簧二211、滑轮一212、端盖一213和端盖二214;中关节组件包括上外壳二215、下外壳二216、转轴二217、扭簧三218、扭簧四219、卡簧三220、卡簧四221、滑轮二222、端盖三223和端盖四224;远关节组件包括上外壳三225、下外壳三226、转轴三227、扭簧五228、扭簧六229、卡簧五230、卡簧六231、滑轮三232、端盖五233和端盖六234。下外壳一206的端面设有两个螺纹孔用于与手掌6螺纹连接;食指第一指节201的两个端面分别与上外壳205一、下外壳二216的端面粘接,食指第二指节202的两个端面分别与上外壳二215、下外壳三226的端面粘接,食指第三指节203的端面与上外壳三225的端面粘接。所述近关节组件中,转轴一207穿过上外壳一205和下外壳一206的轴孔而将它们连接起来,转轴一207上的扭簧一208和扭簧二209安装脚穿过上外壳一205和下外壳一206而被固定,滑轮一212的位置由转轴一207上的卡簧一210和卡簧二211共同固定,转轴一207的位置则由端盖一213和端盖二214共同固定;所述中关节组件和远关节组件的连接方式与近关节组件连接方式相同。各个关节的转角范围由关节外壳的形状限定。
26.如图2所示,一种刚软耦合欠驱动灵巧手装置,所述食指2中的滑轮一212、滑轮二222和滑轮三232,扭簧一208、扭簧二209、扭簧三218、扭簧四219、扭簧五228、扭簧六229和腱绳204共同组成食指2的欠驱动系统。所述腱绳204穿过各个指节、关节且绕过各滑轮,起到驱动的作用,各个关节的转动由腱绳204的收缩或放松来实现。腱绳204的一端与手掌6连接,腱绳204的另一端固定于远关节组件中上外壳三225的端面上。在腱绳204驱动食指2运动的过程中,第一指节201、第二指节202只发生较小的变形,直到碰到物体后才会由于腱绳204力的作用逐渐发生大的变形。食指2的欠驱动系统实现过程为:第一电机606正向转动使
得腱绳204收缩,此时腱绳204上的张力作用在各个滑轮上从而克服各个扭簧的力矩,使得各个关节发生转动,同时也使得各个指节发生不同程度的形变弯曲。通过计算选取不同的扭簧刚度、扭簧预紧角度和滑轮半径,可以控制不同关节转动的快慢;当第一电机606反向转动使得腱绳204放松时,各个关节便在扭簧的力矩作用下逐步回复至初始状态,同时各个指节也因为腱绳张力的消失而回复原状,最终手指完全平展伸直。
27.如图4所示,一种刚软耦合欠驱动灵巧手装置,其手掌6包括:手掌外壳601、食指连接底座602、中指连接底座603、无名指连接底座604、小指连接底座605、拇指传动连接组件和电机固定组件。其中电机固定组件包括第一电机606、第二电机607、第三电机608、第四电机609、第五电机610、第六电机611,以及端固定块一612、端固定块二613、端固定块三614、绕线槽轮一615和上固定块一616、下固定块一617。所述上固定块一616和下固定块一617各有7个,用于固定各电机,其中下固定块一617设有四个螺纹孔用于与手掌外壳601螺纹连接,上固定块一616的四个螺纹孔用于与下固定块一617连接,各个电机分别固定在上固定块一616和下固定块一617中间,其中,用于锥齿轮传动的第六电机611由两对上固定块一616和下固定块一617固定;绕线槽轮一615共5个,分别通过顶丝与第一电机606、第二电机607、第三电机608、第四电机609、第五电机610的输出轴固连;端固定块一612上设有三个螺纹孔和三个通孔,端固定块二613和端固定块三614各有两个螺纹孔和一个通孔,其中螺纹孔用于与手掌外壳601螺纹连接,通孔用于放置绕线槽轮一615;所述食指连接底座602呈l形,水平端面设有两个螺纹孔用于与食指2近关节组件中的下外壳一206固定,竖直断面设有三个螺纹孔用于与手掌外壳601固定,且竖直端面上设有一个螺钉,腱绳204从下外壳一206穿出后绕过该螺钉,再穿过绕线槽轮一615上的小孔与绕线槽轮一615粘接固定;中指连接底座603、无名指连接底座604、小指连接底座605与食指连接底座602结构相同。中指3上的腱绳204以相同方式与第二电机607相连,无名指4上的腱绳204以相同方式与第三电机608相连,小指5上的腱绳204以相同方式与第四电机609相连,拇指上的腱绳204以相同方式与第五电机610相连。
28.如图5所示,手掌6中的拇指传动连接组件包括:锥齿轮一618、锥齿轮二619、导线块620、定位块621、腱绳204、腱绳导管622、拇指连接底座623。导线块620位于端固定块三614下方,与手掌外壳601螺纹连接,导线块620设有通孔,用于导引腱绳204。腱绳204的一端固定于第五电机610的绕线槽轮一615上,然后绕过绕线槽轮一615,穿过导线块620的通孔并伸出,接着进入腱绳导管622中,再穿过拇指连接底座623进入拇指1的近关节组件中。腱绳导管622的一端粘接固连在导线块620的腱绳伸出端,另一端粘接固定在拇指连接底座623的腱绳入口处,使腱绳204在导线块620与拇指连接底座623之间的连接长度始终与腱绳导管622的长度相同。通过第五电机610的正反向转动使得腱绳204收缩与放松,实现拇指1的屈曲与伸展。拇指1的摆动依靠锥齿轮传动结构来实现:锥齿轮一618通过顶丝与第六电机611固连,锥齿轮二619与锥齿轮一618的转轴呈135
°
啮合,锥齿轮二619转轴安装在定位块621上,拇指连接底座623通过顶丝固定在锥齿轮二619和定位块621之间,并与锥齿轮二619同步转动。
29.虽然上文中已经结合附图和实例对本发明进行了描述,然而在不脱离本发明范围的情况下,可对其进行各种改进,且可以用等效物替换其中的部件。因此,本发明并不局限于文中公开的特定实施例,而是包括落入权利要求范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1